Anda mungkin juga menyukai
- Completacion y Reacondicionamiento de Pozos PDFDokumen446 halamanCompletacion y Reacondicionamiento de Pozos PDFCristian Camilo Cruz RomeroBelum ada peringkat
- 2 141204190642 Conversion Gate02Dokumen69 halaman2 141204190642 Conversion Gate02JesusBelum ada peringkat
- Caoneo 120528162657 Phpapp01Dokumen76 halamanCaoneo 120528162657 Phpapp01thunders16Belum ada peringkat
- Analisas de Registro de CementacionDokumen26 halamanAnalisas de Registro de CementacionWilfren Jose Laguna Talavera78% (9)
- Operaciones de Pesca en Hueco Abierto o Entubado de Pozos Petroleros en Perforación o ReparaciónDokumen2 halamanOperaciones de Pesca en Hueco Abierto o Entubado de Pozos Petroleros en Perforación o Reparaciónthunders16Belum ada peringkat
- Completacion de PozosDokumen55 halamanCompletacion de PozosAndres Avila VeraBelum ada peringkat
- PerforacionDokumen210 halamanPerforacionJorge IvánBelum ada peringkat
- PerfoBlogger - Equipos Usados en Completaciones de Pozos PDFDokumen8 halamanPerfoBlogger - Equipos Usados en Completaciones de Pozos PDFthunders16100% (1)
- Perfiles en Pozos Entubados Grupo IIDokumen58 halamanPerfiles en Pozos Entubados Grupo IILizet Choque FloresBelum ada peringkat
- Analisas de Registro de CementacionDokumen26 halamanAnalisas de Registro de CementacionWilfren Jose Laguna Talavera78% (9)
- PerfoBlogger - Equipos Usados en Completaciones de Pozos PDFDokumen8 halamanPerfoBlogger - Equipos Usados en Completaciones de Pozos PDFthunders16100% (1)
- (R) Sistema de IzajeDokumen29 halaman(R) Sistema de IzajeRaul Hernandez92% (12)
- Cap 4 Bes PDFDokumen84 halamanCap 4 Bes PDFthunders16Belum ada peringkat
- PERFORACION 5 (Autoguardado)Dokumen33 halamanPERFORACION 5 (Autoguardado)elbenjamin1990Belum ada peringkat
- Ing de Perforacion PetroleosDokumen49 halamanIng de Perforacion Petroleosginozky100% (7)
- Inyeccion de Agua y Gas Magdalena Paris de FerrerDokumen210 halamanInyeccion de Agua y Gas Magdalena Paris de FerrerAndresoPaezBelum ada peringkat
- Operaciones de Pesca en Hueco Abierto o Entubado de Pozos Petroleros en Perforación o Reparación PDFDokumen2 halamanOperaciones de Pesca en Hueco Abierto o Entubado de Pozos Petroleros en Perforación o Reparación PDFthunders16Belum ada peringkat
- Análisis de Pruebas de Presión-Cied Pdvsa - 002Dokumen275 halamanAnálisis de Pruebas de Presión-Cied Pdvsa - 002danbarco15Belum ada peringkat
- Craig-F-Aspectos de La Ingeniería de Inyección de AguaDokumen138 halamanCraig-F-Aspectos de La Ingeniería de Inyección de AguaJoao Cristofer Tarqui FloresBelum ada peringkat
- Analisis Diseno Pruebas de PresionDokumen319 halamanAnalisis Diseno Pruebas de Presionluis-patino-3500100% (1)
- Ing de Perforacion PetroleosDokumen49 halamanIng de Perforacion Petroleosginozky100% (7)
- EL Taladro y Sus ComponentesDokumen54 halamanEL Taladro y Sus Componentesginozky92% (36)
- (R) Sistema de IzajeDokumen29 halaman(R) Sistema de IzajeRaul Hernandez92% (12)
- Analis Pruebas PresionDokumen103 halamanAnalis Pruebas Presionivan villabonaBelum ada peringkat
- Guia 4 BES SEP 2015 - 2Dokumen15 halamanGuia 4 BES SEP 2015 - 2CamilBelum ada peringkat
- Principios de Pruebas de PresiónDokumen112 halamanPrincipios de Pruebas de Presiónthunders16Belum ada peringkat
- PERFORACION 5 (Autoguardado)Dokumen33 halamanPERFORACION 5 (Autoguardado)elbenjamin1990Belum ada peringkat
- Craig-F-Aspectos de La Ingeniería de Inyección de AguaDokumen138 halamanCraig-F-Aspectos de La Ingeniería de Inyección de AguaJoao Cristofer Tarqui FloresBelum ada peringkat
- Glosario Inglés Español de Términos Técnicos PetrolerosDokumen36 halamanGlosario Inglés Español de Términos Técnicos PetrolerosKarla May GutiérrezBelum ada peringkat
- Inyeccion de Agua y Gas Magdalena Paris de FerrerDokumen210 halamanInyeccion de Agua y Gas Magdalena Paris de FerrerAndresoPaezBelum ada peringkat
- Diseño de Muro A GravedadDokumen7 halamanDiseño de Muro A GravedadRuth Rivas PomaBelum ada peringkat
- Obsesión de VivirDokumen32 halamanObsesión de VivirdonjuancitoBelum ada peringkat
- Dios Habla - PARTE 1 PDFDokumen123 halamanDios Habla - PARTE 1 PDFEdward CarrascalBelum ada peringkat
- Examen - (AAB02) Cuestionario 1 - de Respuesta Al Cuestionario 1 B2, en El SistemaDokumen4 halamanExamen - (AAB02) Cuestionario 1 - de Respuesta Al Cuestionario 1 B2, en El SistemaFranklin DelgadoBelum ada peringkat
- Sistema captador de agua lluvia UASLPDokumen37 halamanSistema captador de agua lluvia UASLPErick MorenoBelum ada peringkat
- Ejercicio en Clase ResoluciónDokumen2 halamanEjercicio en Clase ResoluciónEmpresa GamiBelum ada peringkat
- Presupuesto de Gastos Empresariales1Dokumen52 halamanPresupuesto de Gastos Empresariales1Carmen BrunoBelum ada peringkat
- Guia 1. Estat Descriptiva 1 VarDokumen48 halamanGuia 1. Estat Descriptiva 1 VarGUSTAVO VALLEJOS SANCHEZBelum ada peringkat
- Ondas EstacionariasDokumen6 halamanOndas EstacionariasManuela GuerreroBelum ada peringkat
- Forza 720Dokumen2 halamanForza 720Carlos QuintoBelum ada peringkat
- La Torre de Pisa TrabajoDokumen8 halamanLa Torre de Pisa TrabajoAnthony InocenteBelum ada peringkat
- Formato de Portafolio II Unidad-2017-DSI-II - UladechDokumen15 halamanFormato de Portafolio II Unidad-2017-DSI-II - UladechSandra Martínez0% (1)
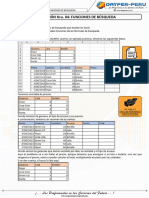
- S4 - Funciones de Búsqueda - MsepDokumen15 halamanS4 - Funciones de Búsqueda - Msepjhonmp220304Belum ada peringkat
- Cuaderno de ExcepciónDokumen12 halamanCuaderno de ExcepciónFlor H. JuscamaitaBelum ada peringkat
- Criterios de Evaluación Matemáticas 3º ESO Familias 23-24Dokumen9 halamanCriterios de Evaluación Matemáticas 3º ESO Familias 23-24mariajperezBelum ada peringkat
- Tarea Semana 2 Técnicas de Evaluación AmbientalDokumen6 halamanTarea Semana 2 Técnicas de Evaluación AmbientalCynthia Olivares CamposBelum ada peringkat
- Puente Grua Manipulación de CargasDokumen73 halamanPuente Grua Manipulación de CargasAtilio PesquinBelum ada peringkat
- Actividad de Aprendizaje 16 Evidencia 3 Ficha Anyropologica y Test FisicoDokumen7 halamanActividad de Aprendizaje 16 Evidencia 3 Ficha Anyropologica y Test FisicoGeorgina FigueroaBelum ada peringkat
- Liderazgo LateralDokumen2 halamanLiderazgo LateralReclutamiento EfectivoBelum ada peringkat
- Com4 - Unidad1 La Exposición AcadémicaDokumen8 halamanCom4 - Unidad1 La Exposición AcadémicaELVIA VASQUEZ PEREZ.Belum ada peringkat
- Reclutamiento interno vs externoDokumen8 halamanReclutamiento interno vs externodaniflechasBelum ada peringkat
- Levantamiento TopograficoDokumen6 halamanLevantamiento Topograficoromel carazas morrielBelum ada peringkat
- Dirofiliarosis en Perros SJL LimaDokumen4 halamanDirofiliarosis en Perros SJL LimaNice RamosBelum ada peringkat
- Cain y Abel: Tutorial sobre ataques MITMDokumen7 halamanCain y Abel: Tutorial sobre ataques MITMJuan ToBelum ada peringkat
- Consejos de Don SeductorDokumen103 halamanConsejos de Don SeductorMANUELFERRANBelum ada peringkat
- Economía Positiva y NormativaDokumen2 halamanEconomía Positiva y NormativaHildaMargaritaDelVillarEspinosaBelum ada peringkat
- Desempeños MatematicaDokumen11 halamanDesempeños MatematicashirBelum ada peringkat
- Ensayo Proctor Modificado ASTM D 1557Dokumen11 halamanEnsayo Proctor Modificado ASTM D 1557JOSUE ANIBAL CUTI QUISPEBelum ada peringkat
- Integración, convolución, correlación y filtros coincidentesDokumen4 halamanIntegración, convolución, correlación y filtros coincidentesDanilo JacomeBelum ada peringkat
- La ContrademocraciaDokumen2 halamanLa ContrademocraciapsiconikoBelum ada peringkat