Anda mungkin juga menyukai
- An Introduction To MathematicaDokumen41 halamanAn Introduction To Mathematicamartin_salazar5856Belum ada peringkat
- An Introduction to Nonlinear Structural Analysis Using the Finite Element MethodDokumen16 halamanAn Introduction to Nonlinear Structural Analysis Using the Finite Element MethodmeghatvBelum ada peringkat
- Abstract ICTACEM - 2014Dokumen2 halamanAbstract ICTACEM - 2014meghatvBelum ada peringkat
- Chapter 8Dokumen19 halamanChapter 8meghatvBelum ada peringkat
- An Introduction to Nonlinear Structural Analysis Using the Finite Element MethodDokumen16 halamanAn Introduction to Nonlinear Structural Analysis Using the Finite Element MethodmeghatvBelum ada peringkat
- Yogi AutobiographyDokumen522 halamanYogi Autobiographyapi-3708220Belum ada peringkat
- Lingashtakam LyricsDokumen1 halamanLingashtakam LyricsChandradatBelum ada peringkat
- Non-Linear Vibration of Composite Beams With An Arbitrary DelaminationDokumen11 halamanNon-Linear Vibration of Composite Beams With An Arbitrary DelaminationmeghatvBelum ada peringkat
- Finite Element AnalysisDokumen8 halamanFinite Element AnalysismeghatvBelum ada peringkat
- LS SrinathDokumen409 halamanLS SrinathAbhishek Sayshuttle86% (7)
- Wolfram Research - Mathematica TutorialDokumen135 halamanWolfram Research - Mathematica Tutorialredline03100% (1)
- Technical Writing FormatDokumen8 halamanTechnical Writing FormatmeghatvBelum ada peringkat
- Aptitude Test On CIRDokumen8 halamanAptitude Test On CIRmeghatvBelum ada peringkat
- Classical Mechanics, Goldstein Solved ProblemsDokumen70 halamanClassical Mechanics, Goldstein Solved ProblemsNuno Roberto Costa100% (1)
- Calculus of VariationsDokumen286 halamanCalculus of VariationsDinesh VermaBelum ada peringkat
- MathematicsDokumen9 halamanMathematicsmeghatvBelum ada peringkat
- 2nd Order VibrationDokumen27 halaman2nd Order VibrationmeghatvBelum ada peringkat
- ConvergenceDokumen15 halamanConvergencemeghatvBelum ada peringkat
- Question Paper Linear AlgebraDokumen1 halamanQuestion Paper Linear AlgebrameghatvBelum ada peringkat
- Linear Algebra ApplicationDokumen20 halamanLinear Algebra ApplicationmeghatvBelum ada peringkat
- Question Paper On AptitudeDokumen17 halamanQuestion Paper On AptitudemeghatvBelum ada peringkat
- Matrices in MathematicsDokumen121 halamanMatrices in MathematicsmeghatvBelum ada peringkat
- Linear AlgebraDokumen1 halamanLinear AlgebrameghatvBelum ada peringkat
- Materials Science Research3Dokumen14 halamanMaterials Science Research3latamudariBelum ada peringkat
- Linear AlgebraDokumen1 halamanLinear AlgebrameghatvBelum ada peringkat
- Research Programme CutOff Report 2013Dokumen18 halamanResearch Programme CutOff Report 2013Sasikumar ManokaranBelum ada peringkat
- Advt DRDODokumen14 halamanAdvt DRDOmeghatvBelum ada peringkat
- Assignment 02Dokumen5 halamanAssignment 02meghatvBelum ada peringkat
- Linear AlgebraDokumen7 halamanLinear AlgebrameghatvBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- r2017 M.E. AeroDokumen38 halamanr2017 M.E. Aeroaeronautical rajasBelum ada peringkat
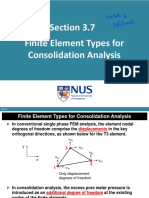
- Section 3.7 Finite Element Types For Consolidation AnalysisDokumen7 halamanSection 3.7 Finite Element Types For Consolidation AnalysisjackBelum ada peringkat
- Modelling and Characterization of A Porosity Graded Lattice Structure For Additively Manufactured BiomaterialsDokumen20 halamanModelling and Characterization of A Porosity Graded Lattice Structure For Additively Manufactured BiomaterialsRob GNBelum ada peringkat
- An Investigation Into Deformation Characteristics of Lapped Connections Between Cold-Formed Steel Z SectionsDokumen16 halamanAn Investigation Into Deformation Characteristics of Lapped Connections Between Cold-Formed Steel Z SectionsBart HoBelum ada peringkat
- 1 s2.0 S0886779801000335 MainDokumen6 halaman1 s2.0 S0886779801000335 MainCristian RincónBelum ada peringkat
- NASA Software Catalog 2021-22Dokumen176 halamanNASA Software Catalog 2021-22JosuéÁngel100% (1)
- IskandaraniDokumen216 halamanIskandaraniLeyner cardenas mercadoBelum ada peringkat
- Precise Finite-Element Model For Pulleys Based On The Hamiltonian Form of ElasticityDokumen13 halamanPrecise Finite-Element Model For Pulleys Based On The Hamiltonian Form of ElasticityShamik ChowdhuryBelum ada peringkat
- Numerical Evaluation On Shell Buckling of Empty Thin-Walled Steel Tanks Under Wind Load According To Current American and European Design CodesDokumen10 halamanNumerical Evaluation On Shell Buckling of Empty Thin-Walled Steel Tanks Under Wind Load According To Current American and European Design Codessanu patilBelum ada peringkat
- Idea Statica Connection: Theoretical BackgroundDokumen52 halamanIdea Statica Connection: Theoretical BackgroundChandra MohanBelum ada peringkat
- On The Evaluation of Critical Lateral Torsional Buckling Loads of Monosymmetric Beam ColumnsDokumen8 halamanOn The Evaluation of Critical Lateral Torsional Buckling Loads of Monosymmetric Beam ColumnsPauloAndresSepulvedaBelum ada peringkat
- Robot Millennium v13.5 User's Manual UpdateDokumen368 halamanRobot Millennium v13.5 User's Manual UpdateAnca BogeaBelum ada peringkat
- Applied Mechanics of Solids (A.f. Bower) Chapter 8 - Theory of FEA - 8Dokumen20 halamanApplied Mechanics of Solids (A.f. Bower) Chapter 8 - Theory of FEA - 8rkBelum ada peringkat
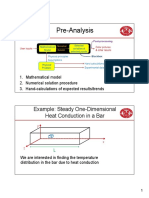
- Pre-Analysis: Example: Steady One-Dimensional Heat Conduction in A BarDokumen12 halamanPre-Analysis: Example: Steady One-Dimensional Heat Conduction in A BarJhuliani CristinaBelum ada peringkat
- MathematicsDokumen24 halamanMathematicss.meinathanBelum ada peringkat
- Strata Control/ Ground Control:: ExplainationDokumen12 halamanStrata Control/ Ground Control:: ExplainationzahidBelum ada peringkat
- A Holistic Approach For The Investigation of Lining Response To Mechanized Tunneling Induced Construction LoadingsDokumen16 halamanA Holistic Approach For The Investigation of Lining Response To Mechanized Tunneling Induced Construction LoadingsBehrang DadfarBelum ada peringkat
- Finite Element Method Chapter 4 - The DSMDokumen17 halamanFinite Element Method Chapter 4 - The DSMsteven_gogBelum ada peringkat
- Finite Element Analysis For Engine Cylinder Head in AnsysDokumen12 halamanFinite Element Analysis For Engine Cylinder Head in AnsysDamianCurcanBelum ada peringkat
- Estudio Comparativo de Los Simuladores de Ujo Subterráneo Visual MODFLOW y FEFLOW 6.0 Comparative Study of Groundwater Simulation Tools Visual MODFLOW and FEFLOW 6.0Dokumen8 halamanEstudio Comparativo de Los Simuladores de Ujo Subterráneo Visual MODFLOW y FEFLOW 6.0 Comparative Study of Groundwater Simulation Tools Visual MODFLOW and FEFLOW 6.0Espiritu Espiritu HiberBelum ada peringkat
- Solutions Manual Introduction To Finite Elements in Engineering 4th Edition Tirupathi R Chandrupatla Ashok D Belegundu PDFDokumen10 halamanSolutions Manual Introduction To Finite Elements in Engineering 4th Edition Tirupathi R Chandrupatla Ashok D Belegundu PDFKOKOLE33% (3)
- Anurag Kumar JhaDokumen14 halamanAnurag Kumar JhaRishi KumarBelum ada peringkat
- Modeling PCB Traces and Crosstalk in ADSDokumen22 halamanModeling PCB Traces and Crosstalk in ADSBalaRajamanickamBelum ada peringkat
- Abaqus Truss TutorialDokumen20 halamanAbaqus Truss Tutorialjianglai2010Belum ada peringkat
- Offshore ANSYSDokumen96 halamanOffshore ANSYSUtkarsh Ramayan100% (2)
- Cold Drawing Process - A Review: January 2013Dokumen8 halamanCold Drawing Process - A Review: January 2013mohdfirdausBelum ada peringkat
- Air-Cored Axial FluxDokumen5 halamanAir-Cored Axial FluxOWAIS HAMEEDBelum ada peringkat
- Analytical Approach of Springback of Arced Thin Plates BendingDokumen6 halamanAnalytical Approach of Springback of Arced Thin Plates Bendingrudolf_laszlokBelum ada peringkat
- Global Local Analysis WhitepaperDokumen3 halamanGlobal Local Analysis WhitepaperagniflameBelum ada peringkat