Anda mungkin juga menyukai
- Detailed Analysis of DC-Link Virtual Impedance-Based Suppression Method For Harmonics Interaction in High-Power PWM Current-Source Motor DrivesDokumen13 halamanDetailed Analysis of DC-Link Virtual Impedance-Based Suppression Method For Harmonics Interaction in High-Power PWM Current-Source Motor DrivesAswathy CjBelum ada peringkat
- ODokumen8 halamanOAswathy CjBelum ada peringkat
- EcapDokumen35 halamanEcapAswathy CjBelum ada peringkat
- ODokumen8 halamanOAswathy CjBelum ada peringkat
- Gateee QuestionsDokumen15 halamanGateee QuestionsAswathy CjBelum ada peringkat
- PvimDokumen6 halamanPvimAswathy CjBelum ada peringkat
- Survey of Bio Inspired Optimization AlgorithmsDokumen15 halamanSurvey of Bio Inspired Optimization AlgorithmsAswathy Cj0% (1)
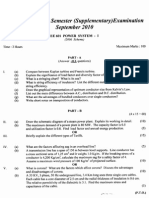
- Power Systems I Sept 2010 (2006 Ad)Dokumen2 halamanPower Systems I Sept 2010 (2006 Ad)Aswathy CjBelum ada peringkat
- ODokumen8 halamanOAswathy CjBelum ada peringkat
- Engineering Mathematics - Sample Questions - Set-3Dokumen3 halamanEngineering Mathematics - Sample Questions - Set-3Aswathy CjBelum ada peringkat
- Ee Gate'13Dokumen16 halamanEe Gate'13menilanjan89nLBelum ada peringkat
- Cusat DSP Question PaperDokumen14 halamanCusat DSP Question PaperSabith PockerBelum ada peringkat
- Math 450 Applied Probability ModelsDokumen34 halamanMath 450 Applied Probability ModelsAswathy CjBelum ada peringkat
- Python FundamentalsDokumen61 halamanPython FundamentalsAswathy CjBelum ada peringkat
- Python GraphsDokumen22 halamanPython GraphsAswathy CjBelum ada peringkat
- ECE 514 Nonlinear Adaptive Control Lecture NotesDokumen4 halamanECE 514 Nonlinear Adaptive Control Lecture NotesAswathy CjBelum ada peringkat
- Py4Inf 06 StringsDokumen31 halamanPy4Inf 06 StringsAswathy CjBelum ada peringkat
- Meetings in English - Unit 3 PDFDokumen4 halamanMeetings in English - Unit 3 PDFAswathy CjBelum ada peringkat
- Introduction To Python: Chen LinDokumen51 halamanIntroduction To Python: Chen LinGiridhar SripathiBelum ada peringkat
- Currents in A Single-Phase FWaveDokumen8 halamanCurrents in A Single-Phase FWaveAswathy CjBelum ada peringkat
- Micro Hydro SummaryDokumen9 halamanMicro Hydro SummaryAswathy CjBelum ada peringkat
- Electrical Machines III 2010 Sept (2006 Ad)Dokumen2 halamanElectrical Machines III 2010 Sept (2006 Ad)Aswathy CjBelum ada peringkat
- SensorsDokumen46 halamanSensorsAswathy CjBelum ada peringkat
- Meetings in English - Unit 3 PDFDokumen4 halamanMeetings in English - Unit 3 PDFAswathy CjBelum ada peringkat
- Meetings in English - Unit 3 PDFDokumen4 halamanMeetings in English - Unit 3 PDFAswathy CjBelum ada peringkat
- Meetings in English - Unit 3 PDFDokumen4 halamanMeetings in English - Unit 3 PDFAswathy CjBelum ada peringkat
- Automatic Street Light ControllerDokumen1 halamanAutomatic Street Light ControllerAswathy CjBelum ada peringkat
- GlobalisationDokumen2 halamanGlobalisationAswathy CjBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- A4D450AO1809Dokumen6 halamanA4D450AO1809adeBelum ada peringkat
- S3100 Manual PDFDokumen112 halamanS3100 Manual PDFMazen AlhouseenBelum ada peringkat
- Aj5512e HZ3CDokumen3 halamanAj5512e HZ3CHendra KosasihBelum ada peringkat
- B.tech. Open Elective III & IV List 4th Year VIII Semester 2021-22Dokumen26 halamanB.tech. Open Elective III & IV List 4th Year VIII Semester 2021-22mahendranavionicsBelum ada peringkat
- N 1 Electrical Experi 07 GernDokumen100 halamanN 1 Electrical Experi 07 GernBrood BelegBelum ada peringkat
- Asy18eba WDokumen33 halamanAsy18eba WFrancisco Jose Domenech SalaBelum ada peringkat
- Annexure III Curriculum & Detailed Syllabus - Electric Motor Rewinding - 0Dokumen9 halamanAnnexure III Curriculum & Detailed Syllabus - Electric Motor Rewinding - 0Reynaldo PesqueraBelum ada peringkat
- Instruction Manual: Sizes 02 - 95, (2X - 8X)Dokumen28 halamanInstruction Manual: Sizes 02 - 95, (2X - 8X)Alejandro DallosBelum ada peringkat
- (Catalogue) Eaton - Hydraulics - Guide To Mobile Industrial HydraulicsDokumen16 halaman(Catalogue) Eaton - Hydraulics - Guide To Mobile Industrial HydraulicsTrần LêBelum ada peringkat
- Electric Motor Maintenance and Troubleshooting GuideDokumen7 halamanElectric Motor Maintenance and Troubleshooting GuidealexfrizBelum ada peringkat
- Design of An Outer-Rotor Brushless DC Motor For Control Moment Gyroscope ApplicationsDokumen72 halamanDesign of An Outer-Rotor Brushless DC Motor For Control Moment Gyroscope ApplicationsNecati CAGANBelum ada peringkat
- Review of Comparative Analysis of Speed Control Techniques of BLDC & PMSM MotorDokumen9 halamanReview of Comparative Analysis of Speed Control Techniques of BLDC & PMSM MotorIJRASETPublicationsBelum ada peringkat
- S100 - User Manual (Simple) - EN - V3.0 - 211020Dokumen270 halamanS100 - User Manual (Simple) - EN - V3.0 - 211020dul theoBelum ada peringkat
- PLC and SCADA PowerpointDokumen172 halamanPLC and SCADA PowerpointRay WongBelum ada peringkat
- Flying Scale Models Issue 270 May 2022Dokumen70 halamanFlying Scale Models Issue 270 May 2022zveicohenBelum ada peringkat
- Time Mark 471 Multi Stage AlternatorDokumen2 halamanTime Mark 471 Multi Stage AlternatorAladino SanchezBelum ada peringkat
- Gearboxes Instruction and Spare Parts Manual: Società Italiana Trasmissioni IndustrialiDokumen36 halamanGearboxes Instruction and Spare Parts Manual: Società Italiana Trasmissioni IndustrialiDlamini Innocent ThulaniBelum ada peringkat
- GEK - 91741A Dynamic Retarding AssemblyDokumen12 halamanGEK - 91741A Dynamic Retarding AssemblyKJDNKJZEFBelum ada peringkat
- N. Tesla.: 46 7, 2-, 4-4 (He/ea& 9a (AuDokumen5 halamanN. Tesla.: 46 7, 2-, 4-4 (He/ea& 9a (Auhix256Belum ada peringkat
- Hopkinsos TestDokumen3 halamanHopkinsos TestGANESH KUMAR B eee2018Belum ada peringkat
- BEML Bull Dozer Parts Inventory ListingDokumen354 halamanBEML Bull Dozer Parts Inventory ListingXiangzhendongBelum ada peringkat
- LS800 eDokumen124 halamanLS800 eNguyễn Bá ThịnhBelum ada peringkat
- Elevator Controller As360Dokumen81 halamanElevator Controller As360Carlos NotarioBelum ada peringkat
- Industrial Motor Control: Control Devices Control Diagram Starting MethodDokumen51 halamanIndustrial Motor Control: Control Devices Control Diagram Starting MethodMuhd Izwan Ikhmal Rosli100% (1)
- Randomation Vehicle Physics ManualDokumen36 halamanRandomation Vehicle Physics ManualbrokenBelum ada peringkat
- BYD C9U Diagnostic Circuit Diagram-EB-LU - SAL.P01-A0-20190308.ENDokumen61 halamanBYD C9U Diagnostic Circuit Diagram-EB-LU - SAL.P01-A0-20190308.ENAxelBelum ada peringkat
- Andhra Pradesh, IndiaDokumen2 halamanAndhra Pradesh, IndiaHarimadhavareddy YenireddyBelum ada peringkat
- Electrical 8 Years Bits PDFDokumen65 halamanElectrical 8 Years Bits PDFSasi Kanth Kola100% (1)
- DC Motor Control: Jacob FainguelerntDokumen30 halamanDC Motor Control: Jacob Fainguelerntcontrol 4uonlyBelum ada peringkat