Anda mungkin juga menyukai
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterDari EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterBelum ada peringkat
- Derivation, Design and Simulation of The Single-Ended Primary-Inductor Converter (SEPIC)Dokumen15 halamanDerivation, Design and Simulation of The Single-Ended Primary-Inductor Converter (SEPIC)camilaBelum ada peringkat
- Frehiwot AdugnaDokumen5 halamanFrehiwot AdugnaFrehiwotBelum ada peringkat
- Abj Zeta TechrxivDokumen6 halamanAbj Zeta Techrxivjin subaBelum ada peringkat
- C. AppendixDokumen20 halamanC. AppendixgechnetBelum ada peringkat
- In This Lecture:: DT Di M DT Di L VDokumen5 halamanIn This Lecture:: DT Di M DT Di L VHassan FarssiBelum ada peringkat
- Report CorrectedDokumen9 halamanReport CorrectedMUHAMAD ZAHIDBelum ada peringkat
- Power Electronics - MITDokumen210 halamanPower Electronics - MITVasco RodriguesBelum ada peringkat
- MSE 2020 With SolutionDokumen4 halamanMSE 2020 With Solutionireshaprem46Belum ada peringkat
- Current Sources and Sinks: V V V V V V VDokumen7 halamanCurrent Sources and Sinks: V V V V V V VSyed HyderBelum ada peringkat
- Derivation and simulation of the Zeta DC-DC converterDokumen6 halamanDerivation and simulation of the Zeta DC-DC convertersarray rawdhaBelum ada peringkat
- 6 Ee462l Fall2011 DC DC BuckDokumen16 halaman6 Ee462l Fall2011 DC DC BuckasmonovBelum ada peringkat
- Diode - On - Off - Examples (Week 4)Dokumen19 halamanDiode - On - Off - Examples (Week 4)Muhammad Ali RazaBelum ada peringkat
- CMOS Digital Integrated Circuits Analysis and Design 4th Edition Kang Solutions Manual 1Dokumen24 halamanCMOS Digital Integrated Circuits Analysis and Design 4th Edition Kang Solutions Manual 1james100% (37)
- Tutorial of Non-Isolated DC/DC Converters in Continuous ModeDokumen15 halamanTutorial of Non-Isolated DC/DC Converters in Continuous ModeSudip MondalBelum ada peringkat
- Passive and Active Passive and Active Current Mirrors Current MirrorsDokumen68 halamanPassive and Active Passive and Active Current Mirrors Current MirrorsDeepanshu Midha5140Belum ada peringkat
- 6002x Notes ExscapeDokumen77 halaman6002x Notes ExscapeNVBelum ada peringkat
- Mit Intro To DC - DC Converters ch5Dokumen27 halamanMit Intro To DC - DC Converters ch5mdasifhassanapspdclBelum ada peringkat
- ESC201T L22 Diode CircuitsDokumen32 halamanESC201T L22 Diode CircuitsRachit MahajanBelum ada peringkat
- Final Report Buck ConverterDokumen30 halamanFinal Report Buck Converter015Maulana Malik IbrahimBelum ada peringkat
- The Depletion LoadDokumen5 halamanThe Depletion LoadVidhya DsBelum ada peringkat
- Lect. 23 MOSFET Current Source and Active Load PDFDokumen9 halamanLect. 23 MOSFET Current Source and Active Load PDFdipaBelum ada peringkat
- DC-DC變換知識Dokumen52 halamanDC-DC變換知識謝勳璋Belum ada peringkat
- Tutorial of Non-Isolated DC-DC Converter in Continuous Mode (Benny Yeung)Dokumen3 halamanTutorial of Non-Isolated DC-DC Converter in Continuous Mode (Benny Yeung)Farhan Malik100% (1)
- Power Electronics Tutorial DC-DC Converter - CCm-1Dokumen3 halamanPower Electronics Tutorial DC-DC Converter - CCm-1Hasnain JamilBelum ada peringkat
- Mathematical Representations For Modelling of Power Electronics Structures (Examples of Hybrid 2L Models)Dokumen12 halamanMathematical Representations For Modelling of Power Electronics Structures (Examples of Hybrid 2L Models)Cornel ArageaBelum ada peringkat
- 19 - Capacitance Contribution To Synchronous Buck Converter LossesDokumen5 halaman19 - Capacitance Contribution To Synchronous Buck Converter LossesWesley de PaulaBelum ada peringkat
- Transmission Lines: 1 A Lossless Transmission LineDokumen20 halamanTransmission Lines: 1 A Lossless Transmission LineChandan ChoudharyBelum ada peringkat
- Diode Models ExplainedDokumen11 halamanDiode Models ExplainedTeferi LemmaBelum ada peringkat
- Dot Convention 3Dokumen23 halamanDot Convention 3Ashish ParasharBelum ada peringkat
- DC DC Boost PPT SeminarDokumen16 halamanDC DC Boost PPT SeminarNishant Yadav100% (1)
- Homework5 SolutionsDokumen17 halamanHomework5 SolutionsAijaz Ahmed100% (1)
- Electric Circuits and Networks Laplace Domain AnalysisDokumen4 halamanElectric Circuits and Networks Laplace Domain AnalysisAniruddha RoyBelum ada peringkat
- Industrial Control: Assignment IIDokumen12 halamanIndustrial Control: Assignment IIOMAR ALEJANDRO LONGORIA VAZQUEZBelum ada peringkat
- BUCK and BoostDokumen8 halamanBUCK and Boostkingsuk majumdarBelum ada peringkat
- Buck ConvertersDokumen15 halamanBuck Convertersחי לוגסיBelum ada peringkat
- PE Buck 5.sqprojDokumen5 halamanPE Buck 5.sqprojPratik BhaleraoBelum ada peringkat
- Second Order TransientsDokumen6 halamanSecond Order Transientsmusy1233Belum ada peringkat
- Sensors and Actuators Engineering System Instrumentation 2nd Silva Solution ManualDokumen36 halamanSensors and Actuators Engineering System Instrumentation 2nd Silva Solution Manualspunkycantingzcat100% (49)
- Trans LinesDokumen8 halamanTrans LinesariehashimieBelum ada peringkat
- Natural Response: ECE 3620 Lecture 2 - Second Order SystemsDokumen5 halamanNatural Response: ECE 3620 Lecture 2 - Second Order SystemsPurbandiniBelum ada peringkat
- Lect 11Dokumen13 halamanLect 11Nyan Linn AungBelum ada peringkat
- RectifiersDokumen51 halamanRectifiersfa21-bee-015100% (1)
- Note 03Dokumen12 halamanNote 03u17814Belum ada peringkat
- Sol 2Dokumen21 halamanSol 2Candice Xie100% (3)
- Analysis of Common-Collector Colpitts OscillatorDokumen8 halamanAnalysis of Common-Collector Colpitts OscillatorFreeFM100% (5)
- DC-DC Part 6 Double PDFDokumen18 halamanDC-DC Part 6 Double PDFNarasimha RajuBelum ada peringkat
- Control Schemes For DC-DC Converter Stages For PV/Battery Based Autonomous SystemDokumen4 halamanControl Schemes For DC-DC Converter Stages For PV/Battery Based Autonomous SystemBojan BankovicBelum ada peringkat
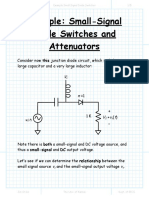
- Example Small Signal Diode SwitchesDokumen5 halamanExample Small Signal Diode SwitchesEphrem YimenuBelum ada peringkat
- RectifiersDokumen8 halamanRectifiersVarun PatidarBelum ada peringkat
- Diode Circuits: Electronics IDokumen25 halamanDiode Circuits: Electronics I呼除預Belum ada peringkat
- Chapter 2Dokumen29 halamanChapter 2Shime EthiopianBelum ada peringkat
- Lab 3 Diode Characteristics With ApplicationsDokumen20 halamanLab 3 Diode Characteristics With ApplicationsAyeshaBelum ada peringkat
- Notes Lecture 8Dokumen23 halamanNotes Lecture 8nelsongil211Belum ada peringkat
- Current Mirrors: Ars DiavoloDokumen50 halamanCurrent Mirrors: Ars Diavolopam_trBelum ada peringkat
- Prob 15Dokumen12 halamanProb 15asdfjkl;asdjfkl;Belum ada peringkat
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Dari EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Belum ada peringkat
- Tables of Weber Functions: Mathematical Tables, Vol. 1Dari EverandTables of Weber Functions: Mathematical Tables, Vol. 1Belum ada peringkat
- CU-10 Central Unit-1Dokumen3 halamanCU-10 Central Unit-1snehithBelum ada peringkat
- Checklist For Entry Into Enclosed Spaces: 8 HoursDokumen2 halamanChecklist For Entry Into Enclosed Spaces: 8 HourssnehithBelum ada peringkat
- D Link DSL 2730 U WiFi Modem Configuration Guide For BSNL - MTNLDokumen11 halamanD Link DSL 2730 U WiFi Modem Configuration Guide For BSNL - MTNLsnehithBelum ada peringkat
- Result 2013Dokumen14 halamanResult 2013snehithBelum ada peringkat
- Syllabus MT 2012 Vizag SteelDokumen3 halamanSyllabus MT 2012 Vizag Steelagupta_253586Belum ada peringkat
- FC P FF 01Dokumen18 halamanFC P FF 01snehithBelum ada peringkat
- T-8000 Operation - c1208 - Hsi - 780-0923Dokumen26 halamanT-8000 Operation - c1208 - Hsi - 780-0923snehithBelum ada peringkat
- Share - ETO Questions With AnswerDokumen2 halamanShare - ETO Questions With AnswersnehithBelum ada peringkat
- ETO ProspectusDokumen23 halamanETO ProspectussnehithBelum ada peringkat
- Lecture Lead-Acid BatteriesDokumen27 halamanLecture Lead-Acid BatteriesmarcomirandaBelum ada peringkat
- Read MeDokumen10 halamanRead Me212970Belum ada peringkat
- Biruk RedaDokumen4 halamanBiruk RedasnehithBelum ada peringkat
- Nagoor Kani Control SystemsDokumen209 halamanNagoor Kani Control SystemsAnonymous eWMnRr70q71% (35)
- Power Factor ImprovementDokumen17 halamanPower Factor Improvementsnehith100% (1)
- Ergonomic Design GuideDokumen66 halamanErgonomic Design GuideAnonymous p2cFoXbjD100% (2)
- BS From 1.1.2011 - 7.2.2011Dokumen1 halamanBS From 1.1.2011 - 7.2.2011snehithBelum ada peringkat
- New Microsoft Office Word DocumentDokumen1 halamanNew Microsoft Office Word DocumentsnehithBelum ada peringkat
- The Opportunity For Bagasse CogenerationDokumen2 halamanThe Opportunity For Bagasse CogenerationAniket DasBelum ada peringkat
- Sub EnggDokumen23 halamanSub EnggChandrasekhar BabuBelum ada peringkat
- MIT OpenCourseWare Http://Ocw - Mit.eduDokumen13 halamanMIT OpenCourseWare Http://Ocw - Mit.edusnehithBelum ada peringkat
- Thesis Optimal Load FlowDokumen102 halamanThesis Optimal Load FlowsnehithBelum ada peringkat
- The Future Is Fusion.Dokumen10 halamanThe Future Is Fusion.snehithBelum ada peringkat
- ch5 PEDokumen27 halamanch5 PEinalcanzable20004289Belum ada peringkat
- Power Electronics Notes 1Dokumen10 halamanPower Electronics Notes 1snehith100% (1)
- DK2041 09 PDFDokumen36 halamanDK2041 09 PDFHassenLBelum ada peringkat
- MIT OpenCourseWare Http://Ocw - Mit.eduDokumen7 halamanMIT OpenCourseWare Http://Ocw - Mit.edusnehithBelum ada peringkat
- Space Charge in Solid DielectricsDokumen55 halamanSpace Charge in Solid Dielectricssnehith100% (1)
- DK2041 10 PDFDokumen39 halamanDK2041 10 PDFHassenLBelum ada peringkat
- Conext CL SpecsDokumen2 halamanConext CL SpecsMatthew OlanrewajuBelum ada peringkat
- Shop Drawing ChecklistsDokumen7 halamanShop Drawing ChecklistsTuấn Anh NguyễnBelum ada peringkat
- 220/132 KV Sub-Station Bhilai-3: Training Report ONDokumen24 halaman220/132 KV Sub-Station Bhilai-3: Training Report ONKalyani ShuklaBelum ada peringkat
- Genset wiring diagram for GE engines and circuit breakers up to 630ADokumen7 halamanGenset wiring diagram for GE engines and circuit breakers up to 630Amahmoud ElmasryBelum ada peringkat
- Cooper PowerDokumen117 halamanCooper PowerMike A. PachacutecBelum ada peringkat
- How To Build A Simple But Powerful Flyback DriverDokumen8 halamanHow To Build A Simple But Powerful Flyback DriverGabriel Droguett OleaBelum ada peringkat
- NGD18N40CLBT4 Ignition IGBT 18 Amps, 400 VoltsDokumen8 halamanNGD18N40CLBT4 Ignition IGBT 18 Amps, 400 VoltsEudis HernandezBelum ada peringkat
- 12.6.0H Date: Contract: Project: Location:: Analysis Results (RW2)Dokumen1 halaman12.6.0H Date: Contract: Project: Location:: Analysis Results (RW2)JovanJoksicBelum ada peringkat
- SAFTRONICSDF8PLUS AA1152 ManualDokumen20 halamanSAFTRONICSDF8PLUS AA1152 ManualMarcelo CabriBelum ada peringkat
- Types of Switches ExplainedDokumen6 halamanTypes of Switches Explainedlegasu zemene100% (1)
- LS-VINA - MV - CatalogueDokumen12 halamanLS-VINA - MV - CatalogueVietAnh NguyenBelum ada peringkat
- Star Delta StarterDokumen4 halamanStar Delta StarterAmey TanawadeBelum ada peringkat
- Overcurrent Protective Devices ExplainedDokumen3 halamanOvercurrent Protective Devices ExplainedMark Kenneth P. ManozoBelum ada peringkat
- Beha-Amprobe HD110C PDFDokumen3 halamanBeha-Amprobe HD110C PDFhus7Belum ada peringkat
- HV Surge ArresterDokumen15 halamanHV Surge ArrestertwinvbooksBelum ada peringkat
- OLTC SpecificationDokumen5 halamanOLTC Specificationamulya00428Belum ada peringkat
- Controlling Stepper Motor Via ArduinoDokumen9 halamanControlling Stepper Motor Via ArduinoManoj SinghBelum ada peringkat
- DC - Machines and Batteries Lesson PlanDokumen3 halamanDC - Machines and Batteries Lesson PlanBilalBelum ada peringkat
- Wittur Eco Plus Drive - ManualDokumen80 halamanWittur Eco Plus Drive - ManualAkiro FreeBelum ada peringkat
- Part Failure Mode DistributionsDokumen4 halamanPart Failure Mode Distributionsjustin0000brownBelum ada peringkat
- DX3 CatgDokumen68 halamanDX3 CatgAjay PatilBelum ada peringkat
- 33kV Bus PT Fuse Blowing Frequently Possible CausesDokumen10 halaman33kV Bus PT Fuse Blowing Frequently Possible CausesAbdulyunus Amir100% (1)
- L-Frame Pricing List 1VAF060701-PL Rev CDokumen18 halamanL-Frame Pricing List 1VAF060701-PL Rev ChmhaidarBelum ada peringkat
- BZT52C2V4Dokumen3 halamanBZT52C2V4Fikri HidayatBelum ada peringkat
- Chapter 1 - Amir - Introduction To Power System Protection 2022 2Dokumen50 halamanChapter 1 - Amir - Introduction To Power System Protection 2022 2Adham AzmiBelum ada peringkat
- Lecture Objectives: Working Principle of Alternator OR Synchronous Generator StatorDokumen5 halamanLecture Objectives: Working Principle of Alternator OR Synchronous Generator StatorZ_JahangeerBelum ada peringkat
- Types of Faults in Power SystemDokumen5 halamanTypes of Faults in Power SystemMohamed RafaatBelum ada peringkat
- Updates To ANSI-EASA AR100 2015 0Dokumen3 halamanUpdates To ANSI-EASA AR100 2015 0VILLANUEVA_DANIEL2064Belum ada peringkat
- EN - ACS800-104 HW Man - FDokumen200 halamanEN - ACS800-104 HW Man - Falexandrewsf100% (1)
- TP48200 +RFC Installation Guide-V4Dokumen44 halamanTP48200 +RFC Installation Guide-V4pradeepBelum ada peringkat