Anda mungkin juga menyukai
- Pulse-Width-Modulation DC Chopper Using Labview SoftwareDokumen5 halamanPulse-Width-Modulation DC Chopper Using Labview SoftwareFlorin LațcuBelum ada peringkat
- Selective Harmonic Elimination by Programmable Pulse Width Modulation in InvertersDokumen6 halamanSelective Harmonic Elimination by Programmable Pulse Width Modulation in InvertersseventhsensegroupBelum ada peringkat
- Pulsewidth Modulation A SurveyDokumen8 halamanPulsewidth Modulation A SurveyDr-Ismayil CBelum ada peringkat
- Holtz 1992 PWMDokumen11 halamanHoltz 1992 PWMSamuelPereiraBelum ada peringkat
- Seminar Report - Threephase, Transformer11111Dokumen22 halamanSeminar Report - Threephase, Transformer11111Aravind G NairBelum ada peringkat
- Mod PamDokumen7 halamanMod PamGanesh Kumar CBelum ada peringkat
- DC - AC Converter - DDokumen30 halamanDC - AC Converter - Dbishnu prasad muniBelum ada peringkat
- Pulse-Width Modulation PDFDokumen8 halamanPulse-Width Modulation PDFSindhuja ThogaruBelum ada peringkat
- Experiment 04 Modulation (PAM) : Pulse Amplitude ObjectiveDokumen8 halamanExperiment 04 Modulation (PAM) : Pulse Amplitude ObjectiveMUHAMMAD AMMARBelum ada peringkat
- Characterization of Conducted EMI Generated by Switched Power ConvertersDokumen3 halamanCharacterization of Conducted EMI Generated by Switched Power ConvertersskrtamilBelum ada peringkat
- Comparison of Output Current Harmonics of Voltage Source Inverter Used Different PWM Control TechniquesDokumen10 halamanComparison of Output Current Harmonics of Voltage Source Inverter Used Different PWM Control TechniquesFitri AhmadBelum ada peringkat
- PWM Outputs Enhance Sensor Signal ConditionersDokumen5 halamanPWM Outputs Enhance Sensor Signal Conditionersshabir faridiBelum ada peringkat
- DComm PracticalsDokumen45 halamanDComm PracticalsShubham RathodBelum ada peringkat
- Modulation Index and Switching Frequency Effect On Symmetric Regular Sampled SPWM (#395111) - 425618Dokumen8 halamanModulation Index and Switching Frequency Effect On Symmetric Regular Sampled SPWM (#395111) - 425618Bouhafs AbdelkaderBelum ada peringkat
- Modulation IndexDokumen6 halamanModulation IndexyechuriyasaswiniBelum ada peringkat
- Simulation Report: Digital TelecommunicationDokumen12 halamanSimulation Report: Digital Telecommunicationhillyatul auliaBelum ada peringkat
- Different PWM Modulation Techniques Indexes Performance Evaluation, 1993.Dokumen7 halamanDifferent PWM Modulation Techniques Indexes Performance Evaluation, 1993.Ali H. NumanBelum ada peringkat
- 25 - Sinusoidal Pulse Width Modulation (SPWM) With Variable Carrier PDFDokumen6 halaman25 - Sinusoidal Pulse Width Modulation (SPWM) With Variable Carrier PDFDevendra HoleyBelum ada peringkat
- A New ISPWM Switching Technique For THD Reduction in Custom Power DevicesDokumen7 halamanA New ISPWM Switching Technique For THD Reduction in Custom Power DevicesBharathkumars89Belum ada peringkat
- Analysis of THD and Output Voltage Performance For Cascaded Multilevel Inverter Using Carrier Pulse Width Modulation TechniquesDokumen8 halamanAnalysis of THD and Output Voltage Performance For Cascaded Multilevel Inverter Using Carrier Pulse Width Modulation TechniquesGaurav BhandariBelum ada peringkat
- PULSEDokumen6 halamanPULSESuresh JKBelum ada peringkat
- ! DISCRETE SW-Mod HysteresisDokumen7 halaman! DISCRETE SW-Mod HysteresisIonut DraganBelum ada peringkat
- Harmonic Analysis and THD Calculation of Trapezoidal PWM Technique by FFT ToolsDokumen3 halamanHarmonic Analysis and THD Calculation of Trapezoidal PWM Technique by FFT ToolsInternational Journal of Application or Innovation in Engineering & ManagementBelum ada peringkat
- Thermal Considerations For Y Capacitors in Wide Band-Gap Based InvertersDokumen6 halamanThermal Considerations For Y Capacitors in Wide Band-Gap Based InvertersMaurizio TrancheroBelum ada peringkat
- Microcontroller Based SPWM Single Phase Inverter For Wind Power ApplicationDokumen4 halamanMicrocontroller Based SPWM Single Phase Inverter For Wind Power ApplicationlaidBelum ada peringkat
- Multi Pulse Width Modulation Techniques (MPWM) : Experiment AimDokumen4 halamanMulti Pulse Width Modulation Techniques (MPWM) : Experiment AimAjay Ullal0% (1)
- Practicum Report Digital Telecommunication: Class TT 2E Khusnul Khotimah 1831130043Dokumen17 halamanPracticum Report Digital Telecommunication: Class TT 2E Khusnul Khotimah 1831130043khusnul khotimahBelum ada peringkat
- C Sai Bhavana CSlab Matlab3Dokumen12 halamanC Sai Bhavana CSlab Matlab3Anirudh KamarajBelum ada peringkat
- Pulse Amplitude Modulation (PAM) - Working, Types & Its ApplicationsDokumen15 halamanPulse Amplitude Modulation (PAM) - Working, Types & Its ApplicationsSubhajit DasBelum ada peringkat
- Adc Lab Manual STUDENTDokumen59 halamanAdc Lab Manual STUDENTramBelum ada peringkat
- Modeling and Analysis of Inter Turn Fault of Power TransformerDokumen7 halamanModeling and Analysis of Inter Turn Fault of Power Transformerwww.irjes.comBelum ada peringkat
- EEng 3210-ch3Dokumen13 halamanEEng 3210-ch3Goitom HaileBelum ada peringkat
- University of Tripoli Faculty of Engineering Department of Electrical and Electronic EngineeringDokumen8 halamanUniversity of Tripoli Faculty of Engineering Department of Electrical and Electronic EngineeringManal SalimBelum ada peringkat
- Discontinuous PWM Techniques For Open-End Winding Induction Motor Drive For Zero Sequence Voltage EliminationDokumen13 halamanDiscontinuous PWM Techniques For Open-End Winding Induction Motor Drive For Zero Sequence Voltage EliminationarunkmepesBelum ada peringkat
- Pulse Amplitude Modulation: TheoryDokumen4 halamanPulse Amplitude Modulation: Theorymukulgrd1Belum ada peringkat
- An Adaptive Hy Steresis-Band Current Control Technique of A Voltage-Fed PWM Inverter For Machine Drive SystemDokumen7 halamanAn Adaptive Hy Steresis-Band Current Control Technique of A Voltage-Fed PWM Inverter For Machine Drive SystemJandfor Tansfg Errott100% (1)
- Improving The Power Quality by MLCI Type DSTATCOM: P. Manoj Kumar Y. Sumanth S. N. V. GaneshDokumen5 halamanImproving The Power Quality by MLCI Type DSTATCOM: P. Manoj Kumar Y. Sumanth S. N. V. GaneshsarathBelum ada peringkat
- Transformer DifferentialDokumen40 halamanTransformer Differentialshahrizal7100% (1)
- Function Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorDokumen7 halamanFunction Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorMuhammad JunaidBelum ada peringkat
- Lab 3 AdcDokumen10 halamanLab 3 AdcDanish Habib Habib MasihBelum ada peringkat
- Acs - Analog Communication Systems ManualDokumen56 halamanAcs - Analog Communication Systems ManualAmandeep SinghBelum ada peringkat
- Sec 1304Dokumen89 halamanSec 1304RAJESH KUMARBelum ada peringkat
- ST2101Dokumen34 halamanST2101sandeep_hotBelum ada peringkat
- Pluse Amplitude Modulation: AIM:-To Study The PAM Process and Its Waveforms. To Study The Demodulation ofDokumen60 halamanPluse Amplitude Modulation: AIM:-To Study The PAM Process and Its Waveforms. To Study The Demodulation ofSrikanth GampalaBelum ada peringkat
- Regular Sampled PWMDokumen11 halamanRegular Sampled PWMg.jayakrishnaBelum ada peringkat
- Voltage Sag Characterization in A Distribution Systems: A Case StudyDokumen8 halamanVoltage Sag Characterization in A Distribution Systems: A Case Studyhuycanh2511Belum ada peringkat
- Accurate Measurement of Power System FrequencyDokumen7 halamanAccurate Measurement of Power System FrequencyOkiPetrus Hutauruk LumbanBaringinBelum ada peringkat
- Drives BasicDokumen32 halamanDrives BasicCubix AutomationBelum ada peringkat
- Analysis and Design of A Multiple Feedback Loop Control Strategy For Single Phase Voltage Source UPS InvertersDokumen10 halamanAnalysis and Design of A Multiple Feedback Loop Control Strategy For Single Phase Voltage Source UPS InvertersFelipeFalconiBelum ada peringkat
- Pim Control Method of Multiple Inverters: MaclevDokumen6 halamanPim Control Method of Multiple Inverters: Maclevalpe_huandvBelum ada peringkat
- Enhanced Modelling and Early Detection oDokumen8 halamanEnhanced Modelling and Early Detection oDalal HelmiBelum ada peringkat
- IEEE - Modeling Guidelines For Switching TransientsDokumen24 halamanIEEE - Modeling Guidelines For Switching TransientsgustavopaloBelum ada peringkat
- F HG I KJ: Measuring RMS Values of Voltage and CurrentDokumen6 halamanF HG I KJ: Measuring RMS Values of Voltage and CurrentAnthony OkwubaBelum ada peringkat
- Design and Analysis of Various Inverters Using Different PWM TechniquesDokumen11 halamanDesign and Analysis of Various Inverters Using Different PWM TechniqueschaitanyaBelum ada peringkat
- Design of Multi-Level Inverter and Its Application As Statcom To Compensate Voltage Sags Due To FaultsDokumen6 halamanDesign of Multi-Level Inverter and Its Application As Statcom To Compensate Voltage Sags Due To FaultsManpreet SinghBelum ada peringkat
- Current Transformer - Electrical Notes & ArticlesDokumen35 halamanCurrent Transformer - Electrical Notes & ArticlesBlake100% (1)
- Design and Simulation of an Inverter With High Frequency Sinusoidal PWM Switching Technique for Harmonic Reduction in a Standalone Utility Grid Harmonic Reduction in a Standalone Utility Grid Synchronized Photovoltaic SystemDokumen6 halamanDesign and Simulation of an Inverter With High Frequency Sinusoidal PWM Switching Technique for Harmonic Reduction in a Standalone Utility Grid Harmonic Reduction in a Standalone Utility Grid Synchronized Photovoltaic SystemS.m. FerdousBelum ada peringkat
- 2019 Calculation of Circuit Parameters of High Frequency Models For Power Transformers Using FEM 1Dokumen11 halaman2019 Calculation of Circuit Parameters of High Frequency Models For Power Transformers Using FEM 1Alvaro PortilloBelum ada peringkat
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsDari EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsBelum ada peringkat
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDari EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlPenilaian: 5 dari 5 bintang5/5 (1)
- Study of The Beam Structure With 4 Design Parameters: 1. ObjectifsDokumen2 halamanStudy of The Beam Structure With 4 Design Parameters: 1. ObjectifswcdeBelum ada peringkat
- SfsDokumen2 halamanSfswcdeBelum ada peringkat
- WS Interp2djtthetDokumen7 halamanWS Interp2djtthetwcdeBelum ada peringkat
- YreyeryDokumen2 halamanYreyerywcdeBelum ada peringkat
- Worksheet IntegezfezeDokumen4 halamanWorksheet IntegezfezewcdeBelum ada peringkat
- Homework 2: Pulse Width Modulation Applied To Induction DriveDokumen2 halamanHomework 2: Pulse Width Modulation Applied To Induction DrivewcdeBelum ada peringkat
- Unesco - Eolss Sample Chapters: Digital Image CorrelationDokumen10 halamanUnesco - Eolss Sample Chapters: Digital Image CorrelationwcdeBelum ada peringkat
- Unesco - Eolss Sample Chapters: Digital Image CorrelationDokumen10 halamanUnesco - Eolss Sample Chapters: Digital Image CorrelationwcdeBelum ada peringkat
- Synchronous Generators - 2 Marks Questions and AnswersDokumen3 halamanSynchronous Generators - 2 Marks Questions and AnswersJoseph Harindranath67% (3)
- ASTM F152 Gaskets Tension TestingDokumen3 halamanASTM F152 Gaskets Tension TestingDieguitoOmarMoralesBelum ada peringkat
- Activities InterventionDokumen2 halamanActivities InterventionDonabel Villasaya CariosBelum ada peringkat
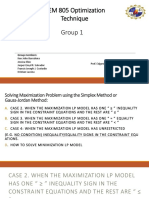
- Optimization Technique Group 1Dokumen60 halamanOptimization Technique Group 1jmlafortezaBelum ada peringkat
- Power Amplifiers: Ranjith Office Level 4 - Building 193 - EEE BuildingDokumen19 halamanPower Amplifiers: Ranjith Office Level 4 - Building 193 - EEE BuildingArambya Ankit KallurayaBelum ada peringkat
- Digital Clock ThesisDokumen7 halamanDigital Clock Thesisjenniferjonessaintpetersburg100% (1)
- OnlineInternetBankingSystem ProjectDokumen81 halamanOnlineInternetBankingSystem ProjectTeam 24x7Belum ada peringkat
- Shell & DecksDokumen63 halamanShell & DecksParth GoswamiBelum ada peringkat
- AI CalculatorDokumen41 halamanAI CalculatorAneeza zafarBelum ada peringkat
- 932qlg65vteb PDFDokumen4 halaman932qlg65vteb PDFMariaBelum ada peringkat
- Rules of MixtureDokumen37 halamanRules of MixtureRahmaF.PuspitaBelum ada peringkat
- ABM11 BussMath Q1 Wk3 ProportionsDokumen12 halamanABM11 BussMath Q1 Wk3 ProportionsArchimedes Arvie Garcia100% (1)
- Actuarial Science Program at The University of ConnecticutDokumen9 halamanActuarial Science Program at The University of ConnecticutRohit VenkatBelum ada peringkat
- Fan Laws: Table 1 Fan Laws Parameters Variable ‘n' Speed Variable ‘ρ' Density Variable ‘d' Impeller Diameter p Q PpowDokumen3 halamanFan Laws: Table 1 Fan Laws Parameters Variable ‘n' Speed Variable ‘ρ' Density Variable ‘d' Impeller Diameter p Q Ppowgeetikag_23Belum ada peringkat
- Software Testing Lab Manual 3Dokumen50 halamanSoftware Testing Lab Manual 3Arya RajuBelum ada peringkat
- Systemair SWS SWR 1602-4802 Data Sheet EngDokumen5 halamanSystemair SWS SWR 1602-4802 Data Sheet EngNemanja SusicBelum ada peringkat
- KEIYU NDT Ultrasonic TransducerDokumen6 halamanKEIYU NDT Ultrasonic TransducersrgokuBelum ada peringkat
- The Best Itext Questions On StackoverflowDokumen361 halamanThe Best Itext Questions On Stackoverflowadaf8850% (2)
- Ambit ManiforlDokumen6 halamanAmbit Maniforlmd_taheriBelum ada peringkat
- Control Systems Design ProjectDokumen3 halamanControl Systems Design ProjectHasan ÇalışkanBelum ada peringkat
- Chap 9 PracDokumen8 halamanChap 9 Pracyiiluk'Moo SineBelum ada peringkat
- Chapter 9 EnglishDokumen53 halamanChapter 9 Englishhoda melhemBelum ada peringkat
- WPS For Different Materail by BhelDokumen176 halamanWPS For Different Materail by Bhelsaisssms911691% (46)
- NUS Past Year PaperDokumen8 halamanNUS Past Year PaperSteven KuaBelum ada peringkat
- FG Wilson AtsDokumen5 halamanFG Wilson AtsErwan Shidiq FathoniBelum ada peringkat
- Audi A6 2.7t Component LocationDokumen3 halamanAudi A6 2.7t Component LocationLucian MicurescuBelum ada peringkat
- CFD Simulation of NACA Airfoilsat Various Angles of AttackDokumen12 halamanCFD Simulation of NACA Airfoilsat Various Angles of AttackdaifrahunaBelum ada peringkat
- Info Sphere Information Analyzer - Methodology and Best PracticesDokumen127 halamanInfo Sphere Information Analyzer - Methodology and Best PracticesRoshava KratunaBelum ada peringkat
- 7.RP.A2a - Determine Proportional RelationshipsDokumen12 halaman7.RP.A2a - Determine Proportional Relationshipsicka830% (1)
- Earthing Transformer and Its Application To The Power SystemDokumen34 halamanEarthing Transformer and Its Application To The Power SystemRathinaKumar100% (1)