Anda mungkin juga menyukai
- 7 Reflect ZoneofproxDokumen5 halaman7 Reflect Zoneofproxapi-315537808Belum ada peringkat
- (AR) 1968 - Numerical Solution of The Navier-Stokes Equations - Chorin PDFDokumen18 halaman(AR) 1968 - Numerical Solution of The Navier-Stokes Equations - Chorin PDFRodrigo AbdoBelum ada peringkat
- LogisticDokumen11 halamanLogisticankitBelum ada peringkat
- Bian - Deep Learning On Smooth ManifoldsDokumen6 halamanBian - Deep Learning On Smooth ManifoldsmattBelum ada peringkat
- Popper, Conjectures and RefutationsDokumen4 halamanPopper, Conjectures and RefutationsManuelBelum ada peringkat
- How Euler Did ItDokumen6 halamanHow Euler Did Itbogrum100% (2)
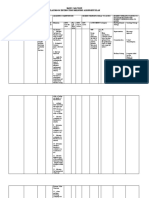
- Basic Calculus Classroom Instruction Delivery Alignment PlanDokumen7 halamanBasic Calculus Classroom Instruction Delivery Alignment PlanIsrael Morta Garzon75% (4)
- Statistique DescriptiveDokumen40 halamanStatistique DescriptiveZara O.0% (1)
- Trigonometry - Primary Trigonometric Ratios - Segments All PDFDokumen6 halamanTrigonometry - Primary Trigonometric Ratios - Segments All PDFElaine BatistaBelum ada peringkat
- Solving Leontief IOModel With Trapezoidal Fuzzy Numbers and Gauss-Seidel AlgorithmDokumen78 halamanSolving Leontief IOModel With Trapezoidal Fuzzy Numbers and Gauss-Seidel AlgorithmHannah Mae Mayol - EntrolizoBelum ada peringkat
- Dyn Sys Phase PortraitDokumen13 halamanDyn Sys Phase PortraitAS1222Belum ada peringkat
- MIT18 05S14 Exam Final SolDokumen11 halamanMIT18 05S14 Exam Final SolErwin Dave M. DahaoBelum ada peringkat
- Criticisms of Euclid's ElementsDokumen4 halamanCriticisms of Euclid's ElementsKitty Cheung100% (1)
- Properties of The Trinomial DistributionDokumen2 halamanProperties of The Trinomial DistributionPerry01Belum ada peringkat
- The Calculus Integral - Brian S. ThomsonDokumen303 halamanThe Calculus Integral - Brian S. ThomsonTruong Huynh100% (1)
- Parametric Equations - BetterExplainedDokumen6 halamanParametric Equations - BetterExplainedavnishBelum ada peringkat
- Mathematics Connections TaskDokumen12 halamanMathematics Connections TaskYeit Fong TanBelum ada peringkat
- Open and Closed SetsDokumen3 halamanOpen and Closed SetsBhimesh JettiBelum ada peringkat
- MATH2045: Vector Calculus & Complex Variable TheoryDokumen50 halamanMATH2045: Vector Calculus & Complex Variable TheoryAnonymous 8nJXGPKnuW100% (2)
- Introduction To The Notion of LimitDokumen5 halamanIntroduction To The Notion of LimitYves SimonBelum ada peringkat
- Infinity and Its CardinalitiesDokumen88 halamanInfinity and Its CardinalitiesMohammed RazikBelum ada peringkat
- Fuzzy RelationsDokumen46 halamanFuzzy RelationsKoushik MaityBelum ada peringkat
- Numerical Linear Algebra With Applications SyllabusDokumen2 halamanNumerical Linear Algebra With Applications SyllabusSankalp ChauhanBelum ada peringkat
- Introduction To Fuzzy SetsDokumen12 halamanIntroduction To Fuzzy SetsKathiresan ManickamBelum ada peringkat
- Lecture 2 (Trigonometric Integrals)Dokumen27 halamanLecture 2 (Trigonometric Integrals)Clarisson Rizzie P. CanluboBelum ada peringkat
- DerangementsDokumen1 halamanDerangementsgauss202Belum ada peringkat
- ProbabilityDokumen28 halamanProbabilityNikhil KumarBelum ada peringkat
- Develpment of Algebra 1995Dokumen25 halamanDevelpment of Algebra 1995Hector VasquezBelum ada peringkat
- Lecture 9-2 - Logic - Analyzing Arguments With Truth TablesDokumen20 halamanLecture 9-2 - Logic - Analyzing Arguments With Truth Tablesmisssunshine112Belum ada peringkat
- Probability-Assignment 1Dokumen4 halamanProbability-Assignment 1ibtihaj aliBelum ada peringkat
- The Surreals Contain The PlumpDokumen4 halamanThe Surreals Contain The PlumpVaclav VopravilBelum ada peringkat
- Sylvester Criterion For Positive DefinitenessDokumen4 halamanSylvester Criterion For Positive DefinitenessArlette100% (1)
- University of Wolverhampton Faculty of Science and Engineering School of EngineeringDokumen4 halamanUniversity of Wolverhampton Faculty of Science and Engineering School of EngineeringSanchithya AriyawanshaBelum ada peringkat
- IntegrationDokumen23 halamanIntegrationnikowawaBelum ada peringkat
- 50 Math IdeasDokumen1 halaman50 Math IdeasAdrian Cervantes LomelíBelum ada peringkat
- Joshua-Mogyoros-Resume-November2020 1Dokumen3 halamanJoshua-Mogyoros-Resume-November2020 1api-530392015Belum ada peringkat
- Probability & Queuing TheoryDokumen15 halamanProbability & Queuing TheorykiransurekirBelum ada peringkat
- Quadratic Word Problems - Projectile MotionDokumen4 halamanQuadratic Word Problems - Projectile Motionyaw197Belum ada peringkat
- A Probabilistic Theory of Pattern Recognition - Devroye, Gyorfi, LugosiDokumen661 halamanA Probabilistic Theory of Pattern Recognition - Devroye, Gyorfi, Lugosiz2048Belum ada peringkat
- MIT Métodos MatemáticosDokumen136 halamanMIT Métodos MatemáticosEsthefano Morales CampañaBelum ada peringkat
- FuzzyDokumen38 halamanFuzzytidjani86Belum ada peringkat
- Unit 3 Fourier Analysis Questions and Answers - Sanfoundry PDFDokumen5 halamanUnit 3 Fourier Analysis Questions and Answers - Sanfoundry PDFzohaibBelum ada peringkat
- Mathematics Introduction For MSCDokumen52 halamanMathematics Introduction For MSC34plt34Belum ada peringkat
- Improper IntegralDokumen8 halamanImproper Integralsathya2814879Belum ada peringkat
- S: Fuzzy Rule-Based SystemsDokumen15 halamanS: Fuzzy Rule-Based Systemssoni_sabatBelum ada peringkat
- Line of Best Fit (Least Square Method)Dokumen5 halamanLine of Best Fit (Least Square Method)spreemouseBelum ada peringkat
- Mathematical InductionDokumen6 halamanMathematical InductionSteve SchouppBelum ada peringkat
- On The Proofs of Basel Problem PDFDokumen19 halamanOn The Proofs of Basel Problem PDFLawrence Acob Eclarin100% (1)
- Non Linear Root FindingDokumen16 halamanNon Linear Root FindingMichael Ayobami AdelekeBelum ada peringkat
- Boolean Algebra (Logic) : ValuesDokumen8 halamanBoolean Algebra (Logic) : ValuesWaseem AhmadBelum ada peringkat
- PHD ProposalDokumen2 halamanPHD ProposalHoang NguyenBelum ada peringkat
- Introduction To Probability PPT 1 FinalDokumen71 halamanIntroduction To Probability PPT 1 FinalNikoli MajorBelum ada peringkat
- Lines and Planes in Space: MATH23 Multivariable CalculusDokumen28 halamanLines and Planes in Space: MATH23 Multivariable CalculusRyan Jhay YangBelum ada peringkat
- C3 Differentiation WorkbookDokumen8 halamanC3 Differentiation WorkbookBrian PattonBelum ada peringkat
- Clifford The Common Sense of The Exact Sciences (1891)Dokumen313 halamanClifford The Common Sense of The Exact Sciences (1891)Marcelo Silvano de CamargoBelum ada peringkat
- Mathematics As A LanguageDokumen6 halamanMathematics As A LanguageFarah LiyanaBelum ada peringkat
- Epsilon Delta ProofsDokumen2 halamanEpsilon Delta ProofsMrDubsterBelum ada peringkat
- ST102 NotesDokumen21 halamanST102 NotesBenjamin Ng0% (1)
- 8th Grade End of Year ProjectDokumen4 halaman8th Grade End of Year ProjectJessica FauroteBelum ada peringkat
- Term Paper On Fuzzy LogicDokumen70 halamanTerm Paper On Fuzzy LogicManojitBelum ada peringkat
- The Magic of the Matrix: Practise Arithmetic While Having Fun!Dari EverandThe Magic of the Matrix: Practise Arithmetic While Having Fun!Belum ada peringkat
- Btech 3 Sem Mathematics 3 Bscm1205 2018Dokumen2 halamanBtech 3 Sem Mathematics 3 Bscm1205 2018Ashutosh SamalBelum ada peringkat
- A Problem Course in Metric SpacesDokumen19 halamanA Problem Course in Metric SpacesAnubrata DattaBelum ada peringkat
- O Collection Problem/: Yas - Bu G R O L/ S.M. NikolskyDokumen203 halamanO Collection Problem/: Yas - Bu G R O L/ S.M. NikolskyDesire YemaBelum ada peringkat
- MasterDokumen76 halamanMasterAgustín Rivero RomeroBelum ada peringkat
- Yearly Plan Mathematics T Sem 1Dokumen7 halamanYearly Plan Mathematics T Sem 1Tan Chin HuatBelum ada peringkat
- CH Exponentials and RotationsDokumen10 halamanCH Exponentials and RotationsPEDRO JESUS GONZALEZ TEBARBelum ada peringkat
- March 30: Change of Variables For Double Integration, Continued and Improper Double IntegralsDokumen22 halamanMarch 30: Change of Variables For Double Integration, Continued and Improper Double IntegralsAliBelum ada peringkat
- Week 007-Presentation Key Concepts of Inverse Functions, Exponential Functions and Logarithmic Functions Part 004Dokumen61 halamanWeek 007-Presentation Key Concepts of Inverse Functions, Exponential Functions and Logarithmic Functions Part 004Mikyla Abad IIBelum ada peringkat
- SEM2Calculus 2MCQs For PracticeDokumen6 halamanSEM2Calculus 2MCQs For PracticeAtharva ShirdhankarBelum ada peringkat
- Changing A Matrix Into Echelon FormDokumen4 halamanChanging A Matrix Into Echelon FormDinçer TöremenBelum ada peringkat
- Fourier Integrals and Fourier TransformsDokumen7 halamanFourier Integrals and Fourier TransformsVraj MehtaBelum ada peringkat
- (Lecture Notes in Mathematics 1364) Robert R. Phelps - Convex Functions, Monotone Operators and Differentiability (1993, Springer)Dokumen127 halaman(Lecture Notes in Mathematics 1364) Robert R. Phelps - Convex Functions, Monotone Operators and Differentiability (1993, Springer)Pham Duy KhanhBelum ada peringkat
- 22341-0321359887 ImDokumen124 halaman22341-0321359887 ImChinatsu LeeBelum ada peringkat
- 4 QR Factorization: 4.1 Reduced vs. Full QRDokumen12 halaman4 QR Factorization: 4.1 Reduced vs. Full QRMohammad Umar RehmanBelum ada peringkat
- Course Notes For MATH 524: Non-Linear OptimizationDokumen112 halamanCourse Notes For MATH 524: Non-Linear OptimizationexampleBelum ada peringkat
- LogarithmsDokumen2 halamanLogarithmsSasiBelum ada peringkat
- A1 A2 Near-RingsDokumen9 halamanA1 A2 Near-RingsJuan Pastor RamosBelum ada peringkat
- ApproximationDokumen14 halamanApproximationLaxmicharan SamineniBelum ada peringkat
- Module 5Dokumen51 halamanModule 5prasidhBelum ada peringkat
- Morse Homology 2010-2011Dokumen137 halamanMorse Homology 2010-2011Eric ParkerBelum ada peringkat
- Periodical Test - Gen. Math - TrueDokumen6 halamanPeriodical Test - Gen. Math - TrueNerish NoayBelum ada peringkat
- NumPy For MATLAB UsersDokumen16 halamanNumPy For MATLAB Usersvladadj_1603Belum ada peringkat
- MathsQuest 1 - 2 2016Dokumen781 halamanMathsQuest 1 - 2 2016HollowweBelum ada peringkat
- Lesson 4 Operations On FunctionsDokumen17 halamanLesson 4 Operations On FunctionsCelestine LunaBelum ada peringkat
- Nptel OptimizationDokumen486 halamanNptel OptimizationDebajyoti DattaBelum ada peringkat
- Lecture 25Dokumen5 halamanLecture 25Syeda Farkhanda Batool NaqviBelum ada peringkat
- AnalysisDokumen3 halamanAnalysisLau MerchanBelum ada peringkat