Anda mungkin juga menyukai
- Preparing Plastics For PaintingDokumen6 halamanPreparing Plastics For PaintingderbewalebelBelum ada peringkat
- Marks and Labels On Containers of BeerDokumen68 halamanMarks and Labels On Containers of BeerderbewalebelBelum ada peringkat
- Polymers Unit Exploring Key ConceptsDokumen23 halamanPolymers Unit Exploring Key ConceptsderbewalebelBelum ada peringkat
- Airframe Stress Analysis and Sizing2editionDokumen811 halamanAirframe Stress Analysis and Sizing2editionderbewalebelBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- 5 MCE Test Data PDFDokumen60 halaman5 MCE Test Data PDFLuis GonzalezBelum ada peringkat
- US Navy NEETS - Assignment AnswersDokumen443 halamanUS Navy NEETS - Assignment AnswersKevin John Froilan90% (52)
- Ac GeneratorDokumen2 halamanAc GeneratorDevansh JoshiBelum ada peringkat
- Direction Practice Questions PDF TitleDokumen8 halamanDirection Practice Questions PDF Titleanon_425326603Belum ada peringkat
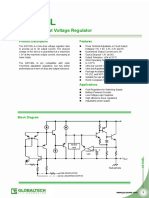
- GS1185L GlobaltechDokumen14 halamanGS1185L GlobaltechPristisBelum ada peringkat
- SAQ Ans 24Dokumen2 halamanSAQ Ans 24harshanauocBelum ada peringkat
- Bouyancy AND Flotation: Engr. Clainie Gay LabisteDokumen43 halamanBouyancy AND Flotation: Engr. Clainie Gay LabisteAngel LoricaBelum ada peringkat
- Transmission Line Parameters ExplainedDokumen11 halamanTransmission Line Parameters ExplainedSwechhya kafleBelum ada peringkat
- Fluid and Thermal PhysicsDokumen41 halamanFluid and Thermal Physicsdavididosa40Belum ada peringkat
- C QuestionsDokumen52 halamanC Questionsnasrqazi590Belum ada peringkat
- Engineering Mechanics: Understanding CG, CM, and CentroidDokumen21 halamanEngineering Mechanics: Understanding CG, CM, and CentroidLogarithemBelum ada peringkat
- EMMI QuestionsDokumen31 halamanEMMI QuestionsRAHULBelum ada peringkat
- Self-Healing Capacitors For A.C./D.C. Applications: AmelecDokumen8 halamanSelf-Healing Capacitors For A.C./D.C. Applications: AmelecJean-Philippe BillaudelBelum ada peringkat
- Turbine Efficiency CalculationDokumen5 halamanTurbine Efficiency CalculationĐồng Hoàng TrungBelum ada peringkat
- TPC NTC/PTC Thermistors: A Kyocera Group CompanyDokumen58 halamanTPC NTC/PTC Thermistors: A Kyocera Group CompanyracordobaBelum ada peringkat
- H2S Conversion Guide for ppb, ppm, Mole%, Mole Fraction & μg/m3Dokumen1 halamanH2S Conversion Guide for ppb, ppm, Mole%, Mole Fraction & μg/m3Yasir MumtazBelum ada peringkat
- Chapter 16Dokumen2 halamanChapter 16velisbarBelum ada peringkat
- General Physics MeasurementsDokumen2 halamanGeneral Physics MeasurementsClaire VillaminBelum ada peringkat
- Mechanics Equations and ConceptsDokumen10 halamanMechanics Equations and ConceptsFaith Laurence SarmientoBelum ada peringkat
- 11th Atkins Physical Chemistry Student Solutions Manual-5Dokumen2 halaman11th Atkins Physical Chemistry Student Solutions Manual-5Javier Palomino GarateBelum ada peringkat
- Workshop 01 Electricity and MagnetismDokumen9 halamanWorkshop 01 Electricity and MagnetismDIEGO ALEJANDRO RIOS PEREZBelum ada peringkat
- Kelton Calculation DetailsDokumen17 halamanKelton Calculation DetailsronziesBelum ada peringkat
- Trafoindo Catalogue Oil Immersed Transformers 2Dokumen2 halamanTrafoindo Catalogue Oil Immersed Transformers 2Nyoman SuryasaBelum ada peringkat
- Gas LawsDokumen63 halamanGas LawsJay-mee Claire V. DioBelum ada peringkat
- Iso 10005:1994Dokumen29 halamanIso 10005:1994Razvan IonescuBelum ada peringkat
- EE8511-Control and Instrumentation LaboratoryDokumen140 halamanEE8511-Control and Instrumentation Laboratorygangsh50% (2)
- تجميعات شامل نظري فيزيا ١ المد الاول⚪️Dokumen4 halamanتجميعات شامل نظري فيزيا ١ المد الاول⚪️medoo9okBelum ada peringkat
- IGCSE Forces and Motion Definitions and ConceptsDokumen6 halamanIGCSE Forces and Motion Definitions and ConceptsLavanya TheviBelum ada peringkat
- Sample Paper 2Dokumen3 halamanSample Paper 2visahBelum ada peringkat
- MCQ in Electricity and Magnetism Fundamentals Part 9 ECE Board ExamDokumen18 halamanMCQ in Electricity and Magnetism Fundamentals Part 9 ECE Board ExamJirah GicangaoBelum ada peringkat