Anda mungkin juga menyukai
- Libro1 (Autoguardado) 2Dokumen2 halamanLibro1 (Autoguardado) 2Juan Alberto Cevallos CastroBelum ada peringkat
- Control de ProcesosDokumen8 halamanControl de ProcesosJuan Alberto Cevallos CastroBelum ada peringkat
- Capitulo 4. ControladoresDokumen15 halamanCapitulo 4. ControladoresVictor MontesBelum ada peringkat
- Prototipado RapidoDokumen7 halamanPrototipado RapidoJuan Alberto Cevallos CastroBelum ada peringkat
- Articulo Del YasuníDokumen6 halamanArticulo Del YasuníJuan Alberto Cevallos CastroBelum ada peringkat
- 1 - Instrumentacion Mecatronica - IntroduccionDokumen35 halaman1 - Instrumentacion Mecatronica - Introduccionnavas1989Belum ada peringkat
- CompensadoresDokumen36 halamanCompensadoresJoseph HerreraBelum ada peringkat
- Diseño de Compensadores en Bode Ad y Atr Con EjemploDokumen6 halamanDiseño de Compensadores en Bode Ad y Atr Con EjemploAdrian PeñalozaBelum ada peringkat
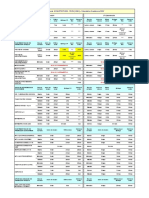
- Datos Tecnicos Del ML1200Dokumen24 halamanDatos Tecnicos Del ML1200Daniel Carmona FloresBelum ada peringkat
- CCCCCC Cà C CDokumen5 halamanCCCCCC Cà C CJuan Alberto Cevallos CastroBelum ada peringkat
- Sistema de Organizacion AdministrativaDokumen29 halamanSistema de Organizacion AdministrativaJoel Estif SalinasBelum ada peringkat
- Articulo Actividad 3Dokumen18 halamanArticulo Actividad 3angie paola castañeda gonzalezBelum ada peringkat
- Richard Meier Arq ExpoDokumen25 halamanRichard Meier Arq ExpoGuzmán Alphonse UnamBelum ada peringkat
- Tipografia y OffsetDokumen10 halamanTipografia y OffsetVasti DelgadoBelum ada peringkat
- Grupos 04 y 05Dokumen39 halamanGrupos 04 y 05Romina Claudia Martinez SotomayorBelum ada peringkat
- Antropometria UpcDokumen28 halamanAntropometria UpcYeli GarcíaBelum ada peringkat
- Captación de agua tipo ladera en CondorpampaDokumen16 halamanCaptación de agua tipo ladera en CondorpampaLeo Pauya RojasBelum ada peringkat
- Amplificadores Desde 4wDokumen14 halamanAmplificadores Desde 4wMitchel Jammal SBelum ada peringkat
- Informe 4 Avalos PaucarDokumen13 halamanInforme 4 Avalos PaucarVictor Beto Avalos Pozo100% (1)
- Tutorial BotellaDokumen17 halamanTutorial BotellaLeonardo A. Velasco P.Belum ada peringkat
- Análisis de La Política Pública de Reparación A Los Pueblos Ética y Culturalmente Diferenciados en ColombiaDokumen141 halamanAnálisis de La Política Pública de Reparación A Los Pueblos Ética y Culturalmente Diferenciados en ColombiaSonia Amaya VegaBelum ada peringkat
- F - 2 - 2 - 1 - Pautas de Mager para El Diseño de Objetivos de AprendizajeDokumen9 halamanF - 2 - 2 - 1 - Pautas de Mager para El Diseño de Objetivos de AprendizajeJorgeBelum ada peringkat
- Diseño geométrico de tramos tangentes en carreterasDokumen6 halamanDiseño geométrico de tramos tangentes en carreterasdavidBelum ada peringkat
- Estudio Administrativo Como Se HaceDokumen34 halamanEstudio Administrativo Como Se HaceJulio CaoBelum ada peringkat
- Solución Examen de MetodologiaDokumen6 halamanSolución Examen de MetodologiaDiego Cárdenas80% (5)
- 3.5 Covarrubias Cruz Oliver de Jesus 28 Feberero 2020Dokumen36 halaman3.5 Covarrubias Cruz Oliver de Jesus 28 Feberero 2020ツEl OlixterBelum ada peringkat
- Plan Investigación-PasosDokumen11 halamanPlan Investigación-PasosLucía GarréBelum ada peringkat
- Forero La Rotta. Diseño UrbanoDokumen3 halamanForero La Rotta. Diseño UrbanoDorian Cervantes SolórzanoBelum ada peringkat
- Linea de Proceso de MotorDokumen60 halamanLinea de Proceso de MotorJESUS ADRIAN AGUILAR RAMIREZBelum ada peringkat
- Ing. Armando Escalera PuentesDokumen5 halamanIng. Armando Escalera PuentesLamas JcBelum ada peringkat
- Guía de Actividades y Rúbrica de Evaluación - Tarea 5 - Diseño de Una InfografíaDokumen8 halamanGuía de Actividades y Rúbrica de Evaluación - Tarea 5 - Diseño de Una Infografíasteban ladino solozaBelum ada peringkat
- Curso - Propulsores - I - Mecanica de FluidosDokumen90 halamanCurso - Propulsores - I - Mecanica de FluidosMichael Encalada Benites100% (1)
- PTT Capítulo 2Dokumen32 halamanPTT Capítulo 2Francisco Del Castillo0% (1)
- Herramientas para La Gestión Del Diseño en Proyectos de EdificaciónDokumen6 halamanHerramientas para La Gestión Del Diseño en Proyectos de EdificaciónFredy MateoBelum ada peringkat
- Design ThinkingDokumen26 halamanDesign ThinkingJOSE HECTOR PATIÑOBelum ada peringkat
- Lámina 1 Galpones PanulDokumen1 halamanLámina 1 Galpones Panuljoseito70Belum ada peringkat
- Espacios Públicos Espacios ColectivosDokumen5 halamanEspacios Públicos Espacios ColectivosAntonio Mariño TorresBelum ada peringkat
- EcomapaDokumen5 halamanEcomapadianita507100% (1)
- ArquitecturaDokumen10 halamanArquitecturaKaluBelum ada peringkat
- Manual Central 433 UADokumen10 halamanManual Central 433 UACarlos FerrufinoBelum ada peringkat