Anda mungkin juga menyukai
- Chocke CC30 & CC40 Outline Drawings-C-2Dokumen8 halamanChocke CC30 & CC40 Outline Drawings-C-2NguyễnBìnhPhươngBelum ada peringkat
- Sustainable Solution For Crude Oil and Natural GasDokumen12 halamanSustainable Solution For Crude Oil and Natural GasHarsenov MaharanyBelum ada peringkat
- Helicopter OperationDokumen15 halamanHelicopter OperationNguyễnBìnhPhương100% (1)
- Electrical Diagram Title for 10-Point LegendDokumen1 halamanElectrical Diagram Title for 10-Point LegendNguyễnBìnhPhươngBelum ada peringkat
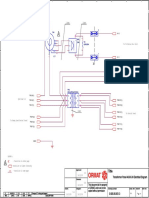
- Gas detector interface PCB circuit diagramDokumen1 halamanGas detector interface PCB circuit diagramNguyễnBìnhPhươngBelum ada peringkat
- Sustainable Solution For Crude Oil and Natural GasDokumen12 halamanSustainable Solution For Crude Oil and Natural GasHarsenov MaharanyBelum ada peringkat
- Seal & LubricatingDokumen2 halamanSeal & LubricatingNguyễnBìnhPhươngBelum ada peringkat
- Clean - Air - Inverter - 6.505.30.617.0Dokumen1 halamanClean - Air - Inverter - 6.505.30.617.0NguyễnBìnhPhươngBelum ada peringkat
- Fuel Oil Line Connected To Filter HeaderDokumen3 halamanFuel Oil Line Connected To Filter HeaderNguyễnBìnhPhươngBelum ada peringkat
- BDG Cold Startup at 15h30 Today AfternoonDokumen1 halamanBDG Cold Startup at 15h30 Today AfternoonNguyễnBìnhPhươngBelum ada peringkat
- 20LB BOND PAPER NOTES FOR SPARK IGNITERSDokumen1 halaman20LB BOND PAPER NOTES FOR SPARK IGNITERSNguyễnBìnhPhươngBelum ada peringkat
- 10 9 8 7 6 5 4 3 2 1Dokumen1 halaman10 9 8 7 6 5 4 3 2 1NguyễnBìnhPhươngBelum ada peringkat
- C03-001-Structural Steel CalculationsDokumen166 halamanC03-001-Structural Steel CalculationsNguyễnBìnhPhươngBelum ada peringkat
- Millennium Ii Multi-Channel Transmitter: User Manual Single or Dual ChannelDokumen47 halamanMillennium Ii Multi-Channel Transmitter: User Manual Single or Dual ChanneldavidBelum ada peringkat
- MCB - 0.505.95.646.0-2Dokumen1 halamanMCB - 0.505.95.646.0-2NguyễnBìnhPhươngBelum ada peringkat
- Capillary Pressure: Reservoir Seal Capillary Pressure / Saturation Relationship (S Model)Dokumen12 halamanCapillary Pressure: Reservoir Seal Capillary Pressure / Saturation Relationship (S Model)NguyễnBìnhPhươngBelum ada peringkat
- CP - 0.505.95.635.0Dokumen3 halamanCP - 0.505.95.635.0NguyễnBìnhPhươngBelum ada peringkat
- Vacuum Pump - Ga - 140140 - enDokumen64 halamanVacuum Pump - Ga - 140140 - enNguyễnBìnhPhươngBelum ada peringkat
- CAD Standards and Data Exchange FormatsDokumen24 halamanCAD Standards and Data Exchange FormatsNguyễnBìnhPhươngBelum ada peringkat
- Emergency Brake DatasheetDokumen7 halamanEmergency Brake DatasheetNguyễnBìnhPhươngBelum ada peringkat
- D01-001-GA DrawingDokumen4 halamanD01-001-GA DrawingNguyễnBìnhPhươngBelum ada peringkat
- Y99ab Test Kit Application NoteDokumen8 halamanY99ab Test Kit Application NoteNguyễnBìnhPhươngBelum ada peringkat
- C03-001-Structural Steel CalculationsDokumen86 halamanC03-001-Structural Steel CalculationsNguyễnBìnhPhươngBelum ada peringkat
- WATEQ4F v4.00 Release Notes and User ManualDokumen10 halamanWATEQ4F v4.00 Release Notes and User ManualNguyễnBìnhPhươngBelum ada peringkat
- Chon - HST-Grayloc Products Catalog GLOC-105 1-06Dokumen1 halamanChon - HST-Grayloc Products Catalog GLOC-105 1-06NguyễnBìnhPhươngBelum ada peringkat
- PowerpointDokumen46 halamanPowerpointNguyễnBìnhPhươngBelum ada peringkat
- Escalation: in Food Price, Escalation of Requirements Arbitrarily: RandomlyDokumen1 halamanEscalation: in Food Price, Escalation of Requirements Arbitrarily: RandomlyNguyễnBìnhPhươngBelum ada peringkat
- P613 05A Lec 06 Rate Relations (050302)Dokumen46 halamanP613 05A Lec 06 Rate Relations (050302)FernandoEnriqueCalveteGonzálezBelum ada peringkat
- Dca Mba PDFDokumen24 halamanDca Mba PDFNguyễnBìnhPhươngBelum ada peringkat
- K NaClDokumen5 halamanK NaClNguyễnBìnhPhươngBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Shiroli Midc Companies ListDokumen27 halamanShiroli Midc Companies ListRandy Lee67% (3)
- Master's Program Guidelines for Computational Science and EngineeringDokumen26 halamanMaster's Program Guidelines for Computational Science and EngineeringFbgames StefBelum ada peringkat
- Advanced Automation TrainingDokumen4 halamanAdvanced Automation TrainingSMEClabsBelum ada peringkat
- Subject Code: GE2025 Unit I: Subject Name: Professional Ethics in EngineeringDokumen2 halamanSubject Code: GE2025 Unit I: Subject Name: Professional Ethics in Engineeringmuralimano06Belum ada peringkat
- Aspen Capital Cost EstimatorDokumen3 halamanAspen Capital Cost EstimatorAnonymous ZPV7AKaBABelum ada peringkat
- ARCALES, Angela C. July 1, 2021 CE176P/A2 Module 1 Final ActivityDokumen2 halamanARCALES, Angela C. July 1, 2021 CE176P/A2 Module 1 Final ActivityAngela ArcalesBelum ada peringkat
- Board of Certified Safety Professionals - Career - Guide To The Safety ProfessionDokumen54 halamanBoard of Certified Safety Professionals - Career - Guide To The Safety Professionsobemile100% (4)
- Modified Fixed Angle Strut and Tie ModelDokumen10 halamanModified Fixed Angle Strut and Tie ModelTiago GonçalvesBelum ada peringkat
- Design of Industrial Pipe Racks Using Modules, Pre-Assembled Units, and Stick-Built ConstructionDokumen15 halamanDesign of Industrial Pipe Racks Using Modules, Pre-Assembled Units, and Stick-Built ConstructioncmkangBelum ada peringkat
- BMR-PIP-DTS-ST-0001 DATA SHEET FOR VALVE Rev. ADokumen6 halamanBMR-PIP-DTS-ST-0001 DATA SHEET FOR VALVE Rev. AAgus SupriadiBelum ada peringkat
- Structural analysis and seismic performance evaluation using N2 methodDokumen8 halamanStructural analysis and seismic performance evaluation using N2 methodBoby culiusBelum ada peringkat
- Weldox 1100 Structural SteelDokumen2 halamanWeldox 1100 Structural SteelAndrewFranciscoBelum ada peringkat
- ERTMS SolutionsDokumen14 halamanERTMS SolutionsshubhamBelum ada peringkat
- Investigation On The Industrial Design Approach For CNCDokumen9 halamanInvestigation On The Industrial Design Approach For CNCAlexandra YubiBelum ada peringkat
- Knowledge Intensive Business Services (KIBS) : Don Scott-Kemmis July 2006Dokumen8 halamanKnowledge Intensive Business Services (KIBS) : Don Scott-Kemmis July 2006KALAWABelum ada peringkat
- PASCHAL Formwork Manual PDFDokumen279 halamanPASCHAL Formwork Manual PDFmodarth100% (1)
- Dr.M.uthayakumar - Google Scholar CitationsDokumen13 halamanDr.M.uthayakumar - Google Scholar CitationsrkBelum ada peringkat
- 7 Star DeltaDokumen27 halaman7 Star DeltaKiran Kumar B MBelum ada peringkat
- Muck Disposal Scheme - CH - KM 375+000Dokumen1 halamanMuck Disposal Scheme - CH - KM 375+000Shivendra KumarBelum ada peringkat
- Advanced Work Packaging (AWP) As Emerging Planning Approach To Improve Project PerformanceDokumen18 halamanAdvanced Work Packaging (AWP) As Emerging Planning Approach To Improve Project PerformanceZine Eddine ZouaghiBelum ada peringkat
- Electrical Thumb Rules (Part-2)Dokumen4 halamanElectrical Thumb Rules (Part-2)AriesFranandaPanjaitanBelum ada peringkat
- Visa Manual 058581 Part 1Dokumen141 halamanVisa Manual 058581 Part 1jossim666Belum ada peringkat
- Saipem Pres2Dokumen45 halamanSaipem Pres2alexrodriguezabcBelum ada peringkat
- 01 Minutes of BOCEs Meeting 28.02.18Dokumen12 halaman01 Minutes of BOCEs Meeting 28.02.18acesrspBelum ada peringkat
- Mechanical design of sieve plate columnDokumen65 halamanMechanical design of sieve plate columnLi Ann Chung92% (12)
- NABL 142 Policy On Calibration & TreasebilityDokumen5 halamanNABL 142 Policy On Calibration & Treasebilitysudhasesh2000100% (2)
- Astm c497dsvsdvdvDokumen10 halamanAstm c497dsvsdvdvaj quintoBelum ada peringkat
- Integrated Rapid Visual Screening of Buildings For Seismic HazardDokumen43 halamanIntegrated Rapid Visual Screening of Buildings For Seismic HazardPADMA RAOBelum ada peringkat
- VENTUS - Catalogue - 2013 PDFDokumen98 halamanVENTUS - Catalogue - 2013 PDFatisz333Belum ada peringkat
- Autocad: CAD SOFTWARE For Drafting 2d and 3d ModelingDokumen21 halamanAutocad: CAD SOFTWARE For Drafting 2d and 3d ModelingAkashBelum ada peringkat