Anda mungkin juga menyukai
- Influência Da Radiação Gama No Comportamento de Esc Do Pmma Tenacificado Avaliada Por Relaxação de TensãoDokumen10 halamanInfluência Da Radiação Gama No Comportamento de Esc Do Pmma Tenacificado Avaliada Por Relaxação de Tensãoviniciustim9Belum ada peringkat
- Capítulo 2Dokumen10 halamanCapítulo 2viniciustim9Belum ada peringkat
- NBR14220 1Dokumen0 halamanNBR14220 1Guilherme LimaBelum ada peringkat
- 2011 Analise Estrutural Chassi Transplantadora Solidworks PDFDokumen12 halaman2011 Analise Estrutural Chassi Transplantadora Solidworks PDFtoshugoBelum ada peringkat
- Mancais de RolamentoDokumen25 halamanMancais de Rolamentorereluta100% (1)
- Elementos - 1 - O Material A - o PDFDokumen26 halamanElementos - 1 - O Material A - o PDFTiagoSiqueiraBelum ada peringkat
- O AcrílicoDokumen41 halamanO AcrílicoOnze net100% (1)
- Catalogo Guias LinearesDokumen148 halamanCatalogo Guias LinearescostelaeciaBelum ada peringkat
- JPS Pinturas EspeciaisDokumen3 halamanJPS Pinturas Especiaisviniciustim9Belum ada peringkat
- Tutorial Eletronica - Aplicacoes e Funcionamento de SensoresDokumen84 halamanTutorial Eletronica - Aplicacoes e Funcionamento de Sensoresph_lopsBelum ada peringkat
- Folheto Casquilhos PDFDokumen2 halamanFolheto Casquilhos PDFviniciustim9Belum ada peringkat
- CALCULOSDokumen14 halamanCALCULOSviniciustim9Belum ada peringkat
- Resistencia Materiais VIÇOSADokumen46 halamanResistencia Materiais VIÇOSAMarcio NunesBelum ada peringkat
- Apostila ParafusosDokumen52 halamanApostila Parafusossermi27Belum ada peringkat
- Tubos Tuper PDFDokumen28 halamanTubos Tuper PDFglobaldisBelum ada peringkat
- 8 - Unioes Por Parafusos PDFDokumen51 halaman8 - Unioes Por Parafusos PDFLucas VieiraBelum ada peringkat
- OBR - Mola A GasDokumen16 halamanOBR - Mola A Gasviniciustim9Belum ada peringkat
- Elementos de MaquinasDokumen104 halamanElementos de MaquinasMagno Felipe TeixeiraBelum ada peringkat
- MiniCataloguePT PDFDokumen235 halamanMiniCataloguePT PDFviniciustim9Belum ada peringkat
- Classificação TubosDokumen20 halamanClassificação TubosEduvânio MachadoBelum ada peringkat
- Catalogo Bearings TecnologicDokumen39 halamanCatalogo Bearings TecnologicMarcelo RosaBelum ada peringkat
- Aço Inox Especificações TécnicasDokumen5 halamanAço Inox Especificações Técnicasemerson rodriguesBelum ada peringkat
- Nomenclatura de SoldagemDokumen44 halamanNomenclatura de SoldagemThiago Oliveira de Sousa50% (2)
- NR12Dokumen31 halamanNR12ricardo oliveira silvaBelum ada peringkat
- Catalogo InoxDokumen48 halamanCatalogo Inoxital1961Belum ada peringkat
- Catalogo de Tubos Estruturais 2012Dokumen48 halamanCatalogo de Tubos Estruturais 2012Neemias AlmeidaBelum ada peringkat
- 2016 Nota Técnica #179 - NR12 Ferramentas EletricasDokumen7 halaman2016 Nota Técnica #179 - NR12 Ferramentas Eletricaseng.aldabeBelum ada peringkat
- Cardápio Interativo CaxiasDokumen1 halamanCardápio Interativo Caxiasviniciustim9Belum ada peringkat
- Exercícios - Resistencia Dos Materiais - Professor - ALmirDokumen36 halamanExercícios - Resistencia Dos Materiais - Professor - ALmirAlmir Emilio DinizBelum ada peringkat
- CDS VAM TOP ® HC 5.5in. 23lb-ft VM 95 13CRSS API Drift 4.545in.Dokumen1 halamanCDS VAM TOP ® HC 5.5in. 23lb-ft VM 95 13CRSS API Drift 4.545in.Elbinho RodriguesBelum ada peringkat
- Slides-Estudo de Tensao BenjaDokumen21 halamanSlides-Estudo de Tensao BenjaBenjamimBelum ada peringkat
- 01 - Lista Exercicio Torcao - Gabarito PDFDokumen2 halaman01 - Lista Exercicio Torcao - Gabarito PDFadriene2118Belum ada peringkat
- Lista HiperestáticaDokumen2 halamanLista HiperestáticaAn100% (1)
- 13 - 10oBG - Tipos de Sismos Ressalto ElasticoDokumen16 halaman13 - 10oBG - Tipos de Sismos Ressalto ElasticoRafael BarrosBelum ada peringkat
- Aula 02 - Barras TracionadasDokumen19 halamanAula 02 - Barras TracionadasGuilherme TelesBelum ada peringkat
- Memorial de CálculoDokumen38 halamanMemorial de CálculoVismael SantosBelum ada peringkat
- Formulário Flexão SimplesDokumen8 halamanFormulário Flexão SimplesGuilherme PortoBelum ada peringkat
- Aula 1 - Molas de Compressão Parte 1Dokumen56 halamanAula 1 - Molas de Compressão Parte 1rgschreiberBelum ada peringkat
- Capítulo Composta 4 2Dokumen20 halamanCapítulo Composta 4 2Eloisa LecheskiBelum ada peringkat
- APRESENTAÇÃO MECANICA DOS FLUIDOS (Experimental)Dokumen10 halamanAPRESENTAÇÃO MECANICA DOS FLUIDOS (Experimental)Maximiliano MotaBelum ada peringkat
- 6 - Falhas Por Fadiga - Carregamento VariávelDokumen61 halaman6 - Falhas Por Fadiga - Carregamento Variávelkuririn DbzBelum ada peringkat
- Capitulo 4Dokumen27 halamanCapitulo 4Francisco MachadoBelum ada peringkat
- 8400 Parte 3Dokumen46 halaman8400 Parte 3Diego Felipe100% (2)
- Lista Exercicios Resistencia Cisalhamento Solos PDFDokumen3 halamanLista Exercicios Resistencia Cisalhamento Solos PDFRoubier SousaBelum ada peringkat
- Propriedades Mecânicas Dos Materiais DentáriosDokumen6 halamanPropriedades Mecânicas Dos Materiais DentáriosAndrea Rebelo100% (3)
- Memorial de Cálculo - Dimensionamento - Linha de Vida - Atividade Na Lateral Do Viaduto - KM 00 PDFDokumen10 halamanMemorial de Cálculo - Dimensionamento - Linha de Vida - Atividade Na Lateral Do Viaduto - KM 00 PDFRenato Nunes100% (1)
- Resistência Dos MateriaisDokumen4 halamanResistência Dos MateriaisMarcus Paulo Ferreira0% (1)
- Lista de Exercícios 2 - Mecânica Dos Sólidos I PDFDokumen3 halamanLista de Exercícios 2 - Mecânica Dos Sólidos I PDFJéssica Sabrina50% (2)
- Apresentação Lei de Hooke e Poison Propredades Mec e Coeficiente Seg - PARTE 2Dokumen49 halamanApresentação Lei de Hooke e Poison Propredades Mec e Coeficiente Seg - PARTE 2Dionéia BertolettiBelum ada peringkat
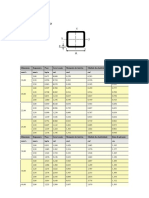
- Modulo Resistencia Tubo QuadradoDokumen4 halamanModulo Resistencia Tubo QuadradoJoao Diniz100% (1)
- Calculo de Vigas BiapoiadasDokumen7 halamanCalculo de Vigas BiapoiadasDr ObraBelum ada peringkat
- Deformações e FalhasDokumen30 halamanDeformações e FalhasInêsBelum ada peringkat
- Aula 10 - CMADokumen16 halamanAula 10 - CMARafael Linhares XavierBelum ada peringkat
- Aula09 Uniões Eixo Cubo EncaixadasDokumen18 halamanAula09 Uniões Eixo Cubo EncaixadasRodrigoBelum ada peringkat
- Aula 3RDokumen24 halamanAula 3RDaniel ArmandoBelum ada peringkat
- Aula 9 Retração e Concreto Endurecido 2017 PDFDokumen47 halamanAula 9 Retração e Concreto Endurecido 2017 PDFAdriano De Souza AraújoBelum ada peringkat
- Fator de Concentração de TensõesDokumen2 halamanFator de Concentração de TensõesengbacarinBelum ada peringkat
- Análise Por Elementos Finitos Pelo ANSYSDokumen64 halamanAnálise Por Elementos Finitos Pelo ANSYSGuilherme MedeirosBelum ada peringkat