Anda mungkin juga menyukai
- Teor CuadricasDokumen29 halamanTeor Cuadricaspmmartinez11Belum ada peringkat
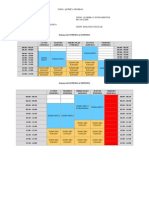
- Horario Isabel en WordDokumen7 halamanHorario Isabel en Wordpmmartinez11Belum ada peringkat
- Resumen CuadricasDokumen5 halamanResumen Cuadricaspmmartinez11Belum ada peringkat
- Teor CuadricasDokumen29 halamanTeor Cuadricaspmmartinez11Belum ada peringkat
- Relacion Tema 12 Ampliacion C13-14 PDFDokumen6 halamanRelacion Tema 12 Ampliacion C13-14 PDFpmmartinez11Belum ada peringkat
- QU U1 T1 Mapa ConceptualDokumen1 halamanQU U1 T1 Mapa Conceptualpmmartinez11Belum ada peringkat
- QU U1 T2 Mapa ConceptualDokumen1 halamanQU U1 T2 Mapa Conceptualpmmartinez11Belum ada peringkat
- QU U3 T1 Contenidos v01Dokumen35 halamanQU U3 T1 Contenidos v01pmmartinez11Belum ada peringkat
- QU U1 T2 ResumenDokumen7 halamanQU U1 T2 Resumenpmmartinez11Belum ada peringkat
- PACQU U1 T1 ContenidosDokumen20 halamanPACQU U1 T1 Contenidospmmartinez11Belum ada peringkat
- QU U1 T1 Resumen PDFDokumen6 halamanQU U1 T1 Resumen PDFpmmartinez11Belum ada peringkat
- Reducción de MatricesDokumen9 halamanReducción de MatricesfremerBelum ada peringkat
- PAC QU U1 T2 ContenidosDokumen34 halamanPAC QU U1 T2 Contenidospmmartinez11Belum ada peringkat
- QU U1 T1 Mapa ConceptualDokumen1 halamanQU U1 T1 Mapa Conceptualpmmartinez11Belum ada peringkat
- Teorico Repaso Biol Celular y Molecular 2011Dokumen34 halamanTeorico Repaso Biol Celular y Molecular 2011Gustavo TorresBelum ada peringkat
- TEV Hibridacion RR PDFDokumen12 halamanTEV Hibridacion RR PDFpmmartinez11Belum ada peringkat
- Fis 2º Bto A y EDokumen2 halamanFis 2º Bto A y Epmmartinez11Belum ada peringkat
- Problemas álgebraII 08 09Dokumen41 halamanProblemas álgebraII 08 09Edwin Saravia CampoverdeBelum ada peringkat
- Fisica 2º Bto A y EDokumen2 halamanFisica 2º Bto A y Epmmartinez11Belum ada peringkat
- MICROSCOPIA y ORGANIZACION CELULARDokumen32 halamanMICROSCOPIA y ORGANIZACION CELULARDocente FarmaBelum ada peringkat
- C 13-14 CinemáticaDokumen8 halamanC 13-14 Cinemáticapmmartinez11Belum ada peringkat
- PROPMATRDETDokumen2 halamanPROPMATRDETMario OrdazBelum ada peringkat
- UDEC Manual de Biologia CelularDokumen251 halamanUDEC Manual de Biologia CelularSharin rioBelum ada peringkat
- UDEC Manual de Biologia CelularDokumen251 halamanUDEC Manual de Biologia CelularSharin rioBelum ada peringkat
- El Método CientíficoDokumen37 halamanEl Método CientíficoJohn Ivan Garcia AgamaBelum ada peringkat
- Reducción de MatricesDokumen9 halamanReducción de MatricesfremerBelum ada peringkat
- Quimica 2 BDokumen12 halamanQuimica 2 Bpmmartinez11Belum ada peringkat
- Ciencias en Pisa para WebDokumen168 halamanCiencias en Pisa para WebAmparo Albero González100% (1)
- Bloque 1 Primeros PasosDokumen16 halamanBloque 1 Primeros Pasospmmartinez11Belum ada peringkat
- Guía Quimica NuclearDokumen6 halamanGuía Quimica Nuclearsorsire LabarcaBelum ada peringkat
- Curvas VerticalesDokumen4 halamanCurvas VerticalesAnderson GilBelum ada peringkat
- TAREA 1 - Teoría Atómica y Modelo Mecánico Cuántico Del ÁtomoDokumen2 halamanTAREA 1 - Teoría Atómica y Modelo Mecánico Cuántico Del ÁtomoMario Andres B.Belum ada peringkat
- Introducción A Las Ondas ElectromagnéticasDokumen9 halamanIntroducción A Las Ondas ElectromagnéticasJUAN PABLO SATIZABAL PARRABelum ada peringkat
- Laboratorio 1.0 - Ley de TorricelliDokumen9 halamanLaboratorio 1.0 - Ley de TorricelliJuän Krlos Muñoz AguilarBelum ada peringkat
- Apuntes II Unidad - PRDokumen33 halamanApuntes II Unidad - PRNathaly HidalgoBelum ada peringkat
- Monografía Del Modelo Atómico de RutherfordDokumen27 halamanMonografía Del Modelo Atómico de RutherfordSergio JMBelum ada peringkat
- Ejercicios de Fuerza Eléctrica y Campo EléctricoDokumen16 halamanEjercicios de Fuerza Eléctrica y Campo EléctricoJose0% (1)
- Ecuaciones DiferencialesDokumen23 halamanEcuaciones DiferencialesFito Riojas ZuñigaBelum ada peringkat
- FENOmENO ONDULATORODokumen5 halamanFENOmENO ONDULATOROVirginia ValdezBelum ada peringkat
- Ejercicios de FísicaDokumen6 halamanEjercicios de FísicaUriel Hernandez RojasBelum ada peringkat
- Teoria AtomicaDokumen74 halamanTeoria AtomicaLucy Mamani CruzBelum ada peringkat
- Uac Ii SepDokumen26 halamanUac Ii SepOn Binjuu xdBelum ada peringkat
- Resumenes 1 QuimicaDokumen24 halamanResumenes 1 QuimicaDaniel vcBelum ada peringkat
- Afun OptativaDokumen168 halamanAfun OptativaVICTOR PEREZBelum ada peringkat
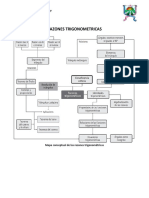
- Razones TrigonometricasDokumen6 halamanRazones Trigonometricasmayerli vegaBelum ada peringkat
- Teoria de CuerdasDokumen3 halamanTeoria de CuerdasDidier MartínezBelum ada peringkat
- Ley de Gauss y flujo eléctricoDokumen4 halamanLey de Gauss y flujo eléctricoArianne LunaBelum ada peringkat
- Universidad de El Salvador Fisica IiDokumen2 halamanUniversidad de El Salvador Fisica IiMoises Nolasco GarciaBelum ada peringkat
- Campo Eléctrico Entre PlacasDokumen11 halamanCampo Eléctrico Entre PlacasDiegoAndresJofreVillablancaBelum ada peringkat
- Cap. 9 Impulso... - InfografíaDokumen1 halamanCap. 9 Impulso... - InfografíajimenaBelum ada peringkat
- Practica 10Dokumen6 halamanPractica 10Geovani MincholaBelum ada peringkat
- Resumenes de VideosDokumen11 halamanResumenes de Videosjuandavid100% (1)
- Qué son los isótopos y su importancia en la masa atómicaDokumen9 halamanQué son los isótopos y su importancia en la masa atómicageraldine allccaBelum ada peringkat
- Monografia de QuimicaDokumen10 halamanMonografia de QuimicaJose EnriBelum ada peringkat
- Teoría CuánticaDokumen7 halamanTeoría CuánticaARANDA FONSECA JACQUELINEBelum ada peringkat
- Principio incertidumbre HeisenbergDokumen1 halamanPrincipio incertidumbre HeisenbergDiegoZaragozaMendozaBelum ada peringkat
- Guía La LuzDokumen16 halamanGuía La LuzHugo Jimenez TrabajoBelum ada peringkat
- Dibujar Ejercicios FisicosDokumen1 halamanDibujar Ejercicios FisicosiesanchezcantonBelum ada peringkat
- Ejercicios Desarrollados de Analis Matematica IVDokumen19 halamanEjercicios Desarrollados de Analis Matematica IVelmer sotoBelum ada peringkat