Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Portal Frame DesignDokumen4 halamanPortal Frame DesignUlasi IfeanyiBelum ada peringkat
- Station Northing Easting Tangential DirectionDokumen1 halamanStation Northing Easting Tangential DirectionUlasi IfeanyiBelum ada peringkat
- Station Northing Easting Tangential DirectionDokumen1 halamanStation Northing Easting Tangential DirectionUlasi IfeanyiBelum ada peringkat
- Item Description QTY Unit Rate Concrete: TotalDokumen9 halamanItem Description QTY Unit Rate Concrete: TotalUlasi IfeanyiBelum ada peringkat
- Assignment - Tension MembersDokumen3 halamanAssignment - Tension MembersUlasi IfeanyiBelum ada peringkat
- SoftwareDokumen3 halamanSoftwareUlasi IfeanyiBelum ada peringkat
- BS 5950-2000 Example 002Dokumen5 halamanBS 5950-2000 Example 002Ulasi IfeanyiBelum ada peringkat
- File66316 PDFDokumen4 halamanFile66316 PDFUlasi IfeanyiBelum ada peringkat
- Design of Aberdeen Channel Bridge - Hong KongDokumen8 halamanDesign of Aberdeen Channel Bridge - Hong KongUlasi IfeanyiBelum ada peringkat
- You Created This PDF From An Application That Is Not Licensed To Print To Novapdf PrinterDokumen1 halamanYou Created This PDF From An Application That Is Not Licensed To Print To Novapdf PrinterUlasi IfeanyiBelum ada peringkat
- PlatformClients PC WWEULA-En US-20150407 1357Dokumen10 halamanPlatformClients PC WWEULA-En US-20150407 1357Ulasi IfeanyiBelum ada peringkat
- PlatformClients PC WWEULA-En US-20150407 1357Dokumen10 halamanPlatformClients PC WWEULA-En US-20150407 1357Ulasi IfeanyiBelum ada peringkat
- 03 Survey Proposal TemplateDokumen16 halaman03 Survey Proposal TemplateAnonymous U0ADl9qUjBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Analytical Solution To Transient Heat Conduction in Polar Coordinates With Multiple Layers in Radial DirectionDokumen13 halamanAnalytical Solution To Transient Heat Conduction in Polar Coordinates With Multiple Layers in Radial DirectionGabriel SaavedraBelum ada peringkat
- A New Versatile Electronic Speckle Pattern Interferometer For VibDokumen318 halamanA New Versatile Electronic Speckle Pattern Interferometer For Vibssunil7432Belum ada peringkat
- ResearchDokumen19 halamanResearchJonesa SerranoBelum ada peringkat
- Poutineau (2015) PDFDokumen24 halamanPoutineau (2015) PDFMiguel SzejnblumBelum ada peringkat
- Unit 4 - Continuous Random VariablesDokumen35 halamanUnit 4 - Continuous Random VariablesShouq AbdullahBelum ada peringkat
- Package Survival': R Topics DocumentedDokumen185 halamanPackage Survival': R Topics DocumentedFlorencia FirenzeBelum ada peringkat
- Linear Algebra With Applications 9th Edition Leon Solutions ManualDokumen32 halamanLinear Algebra With Applications 9th Edition Leon Solutions ManualLafoot BabuBelum ada peringkat
- I. Objectives: S10FE-llg-50Dokumen10 halamanI. Objectives: S10FE-llg-50John Loreto MentesBelum ada peringkat
- Data Structures and Algorithms in Java 6th Edition 201 270Dokumen70 halamanData Structures and Algorithms in Java 6th Edition 201 270longle18704Belum ada peringkat
- Solved Multiple Choice Questions of DataDokumen40 halamanSolved Multiple Choice Questions of Datamini projectBelum ada peringkat
- How To Solve Fractions: Solving Quadratic EquationsDokumen7 halamanHow To Solve Fractions: Solving Quadratic Equationsapi-126876773Belum ada peringkat
- Brian Speed Keith Gordon Kevin Evans: Found Math - Spec B00.qxd 02/03/06 13:23 Page IDokumen6 halamanBrian Speed Keith Gordon Kevin Evans: Found Math - Spec B00.qxd 02/03/06 13:23 Page IDavid ReesBelum ada peringkat
- Anova 1Dokumen11 halamanAnova 1vijay2101Belum ada peringkat
- Phase Difference & Phase RelationshipsDokumen24 halamanPhase Difference & Phase RelationshipsGabriel Carl AlpuertoBelum ada peringkat
- Aits 2021 FT Ix Jeem.Dokumen16 halamanAits 2021 FT Ix Jeem.Atharv AtoleBelum ada peringkat
- PPAP ChecklistDokumen4 halamanPPAP ChecklistHirbod HirmandBelum ada peringkat
- Liceo de Pulilan CollegesDokumen2 halamanLiceo de Pulilan Collegesjv_cindyBelum ada peringkat
- Strouhal ADokumen8 halamanStrouhal Asivaaero41Belum ada peringkat
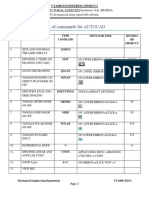
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDokumen15 halamanList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelBelum ada peringkat
- DatalabDokumen5 halamanDatalabjackBelum ada peringkat
- 2139 12021 1 PB PDFDokumen9 halaman2139 12021 1 PB PDFSantosh Kumar PandeyBelum ada peringkat
- Relational ModelDokumen4 halamanRelational ModelPrateek GoyalBelum ada peringkat
- OOPM Theory QuestionsDokumen7 halamanOOPM Theory Questionssheenam_bhatiaBelum ada peringkat
- Test AnxietyDokumen6 halamanTest AnxietyDanyBelum ada peringkat
- CS 132 Discrete Structures in Computer Science Syllabus Spring 2017Dokumen3 halamanCS 132 Discrete Structures in Computer Science Syllabus Spring 2017Jimmy DoreBelum ada peringkat
- Iso/ts 6336-20:2017 (E)Dokumen5 halamanIso/ts 6336-20:2017 (E)Anirban DasBelum ada peringkat
- Descriptive STatistics For Qualitative DataDokumen34 halamanDescriptive STatistics For Qualitative DataMwanjala GasambiBelum ada peringkat
- CDMA Simulation: Alison Hightman Elaine Chung Alejandra GalvanDokumen30 halamanCDMA Simulation: Alison Hightman Elaine Chung Alejandra GalvanericnaneBelum ada peringkat
- TSB 89 ADokumen29 halamanTSB 89 AŽarko MočnikBelum ada peringkat
- Example: Triangle On A Face IconDokumen26 halamanExample: Triangle On A Face IconGinalyn QuimsonBelum ada peringkat