Anda mungkin juga menyukai
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDari EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaBelum ada peringkat
- UF1253 - Diagnóstico de deformaciones estructuralesDari EverandUF1253 - Diagnóstico de deformaciones estructuralesBelum ada peringkat
- ++++++++++++++++++++++lista de Instrucciones PLC FestoDokumen36 halaman++++++++++++++++++++++lista de Instrucciones PLC FestoAntony Charles TejadaBelum ada peringkat
- Operaciones de SaltoDokumen9 halamanOperaciones de Saltojose Gerardo RamirezBelum ada peringkat
- Codigos CNCDokumen13 halamanCodigos CNCJonathanRamirezRamirBelum ada peringkat
- Prueba Módulo 3 Tema 3Dokumen5 halamanPrueba Módulo 3 Tema 3Miguel david CastroBelum ada peringkat
- Tipos de SaltosDokumen3 halamanTipos de SaltosReynel ChaparroBelum ada peringkat
- Files Descargas Siemens InfoPLC Net Guia4AUPG S7 200 GRAFCETDokumen13 halamanFiles Descargas Siemens InfoPLC Net Guia4AUPG S7 200 GRAFCETanttonylordBelum ada peringkat
- Ejercicio Grafcet AwlDokumen5 halamanEjercicio Grafcet AwlJose Antonio LastresBelum ada peringkat
- DIAGRAMAS PLC s-LOGO!Dokumen102 halamanDIAGRAMAS PLC s-LOGO!Xavier SanguñaBelum ada peringkat
- Ejemplo GrafcetDokumen5 halamanEjemplo Grafcetjlcorsan9117Belum ada peringkat
- Introduccion - Programacion PIC en Lenguaje C Parte1 PDFDokumen55 halamanIntroduccion - Programacion PIC en Lenguaje C Parte1 PDFSonja Maynard100% (1)
- Las Instrucciones Del EnsambladorDokumen19 halamanLas Instrucciones Del EnsambladorMiguel Angel MartinezBelum ada peringkat
- ContenidoDokumen12 halamanContenidoRosa Lilia CaballeroBelum ada peringkat
- GrafcetDokumen11 halamanGrafcetOswaldo GuerraBelum ada peringkat
- Operaciones LógicasDokumen21 halamanOperaciones LógicasRuben Holguino BordaBelum ada peringkat
- Instrucciones Del PIC16F84ADokumen43 halamanInstrucciones Del PIC16F84AAbel Alcoser HuaytaBelum ada peringkat
- Salidas de Enganche y DesengancheDokumen6 halamanSalidas de Enganche y DesengancheferbuifoBelum ada peringkat
- U2 Programación Básica, Angel Hernandez DiazDokumen16 halamanU2 Programación Básica, Angel Hernandez DiazÁngel Hernández DíazBelum ada peringkat
- Instrucciones AritmeticasDokumen27 halamanInstrucciones AritmeticasEduardo CornelioBelum ada peringkat
- Tema2 Saltos Ciclos Incrementos y DecrementosDokumen18 halamanTema2 Saltos Ciclos Incrementos y DecrementosAnonymous Sn2Vm4NVoBelum ada peringkat
- 4 ProgramacionII PDFDokumen11 halaman4 ProgramacionII PDFMarco CardenasBelum ada peringkat
- Registros de Bandera, Cadenas y SaltosDokumen7 halamanRegistros de Bandera, Cadenas y SaltosPedro MendozaBelum ada peringkat
- Tutorial de Programación en Simatic S5Dokumen18 halamanTutorial de Programación en Simatic S5Carlos ToMenBelum ada peringkat
- Tutorial de Programación en Simatic S5Dokumen19 halamanTutorial de Programación en Simatic S5Johnn ChalcoBelum ada peringkat
- Las Instrucciones Del Ensamblador Salto Comparacíón LoopDokumen8 halamanLas Instrucciones Del Ensamblador Salto Comparacíón LoopAnna ReznorBelum ada peringkat
- SisComp-06-Intelx86 64 ISA SegundaparteDokumen59 halamanSisComp-06-Intelx86 64 ISA SegundaparteJaviera CastilloBelum ada peringkat
- Capitulo 5. Unity Pro PDFDokumen27 halamanCapitulo 5. Unity Pro PDFambietBelum ada peringkat
- Prácticas Presenciales de Autómatas ProgramablesDokumen12 halamanPrácticas Presenciales de Autómatas ProgramablesDragos IonescuBelum ada peringkat
- Practica Graffcet LaderDokumen8 halamanPractica Graffcet LaderPaula Andrea CastañedaBelum ada peringkat
- Inst SaltoDokumen8 halamanInst SaltoAngel Lucio PomaresBelum ada peringkat
- SaltosDokumen2 halamanSaltosLuis PamplonaBelum ada peringkat
- Ejercicios de Programacion Awl Step 7Dokumen13 halamanEjercicios de Programacion Awl Step 7Julio Tomas Trujillo CastroBelum ada peringkat
- Guia PLCDokumen13 halamanGuia PLCrickmiusicBelum ada peringkat
- GUIAnLOGOnAI 54629de43916a76Dokumen6 halamanGUIAnLOGOnAI 54629de43916a76lagranpmBelum ada peringkat
- Laboratorio #15 Diseño de Controladores Con SISOToolDokumen7 halamanLaboratorio #15 Diseño de Controladores Con SISOToolacajahuaringaBelum ada peringkat
- Trabajo Practica No 1 Sistemas Digitales SecuencialesDokumen16 halamanTrabajo Practica No 1 Sistemas Digitales SecuencialesPipe MoralesBelum ada peringkat
- 1 A MANUAL Programacion PLC Festo 202Dokumen18 halaman1 A MANUAL Programacion PLC Festo 202EduardoBelum ada peringkat
- RAADokumen16 halamanRAARafael MancillaBelum ada peringkat
- 01 - Repertorio de InstruccionesDokumen11 halaman01 - Repertorio de InstruccionesMack CartagenaBelum ada peringkat
- Introduccion A La Programacion LogoDokumen37 halamanIntroduccion A La Programacion LogoJose CabalBelum ada peringkat
- Diapositivas GRAFCETDokumen50 halamanDiapositivas GRAFCETLeonard KevBelum ada peringkat
- Ud3. Automatas Programables Tema 4 Tsx17Dokumen10 halamanUd3. Automatas Programables Tema 4 Tsx17Daniel IorgaBelum ada peringkat
- P02 Programacion en EnsambladorDokumen8 halamanP02 Programacion en EnsambladorMarco Antonio IllanesBelum ada peringkat
- Guia de Trabajo 7Dokumen34 halamanGuia de Trabajo 7Juan Diego Vergel RangelBelum ada peringkat
- Omron 08Dokumen257 halamanOmron 08Rolando Nuñez del PradoBelum ada peringkat
- AP Divisor de Frecuencia y Máquinas de EstadoDokumen8 halamanAP Divisor de Frecuencia y Máquinas de EstadoRonny AuccapiñaBelum ada peringkat
- Trabajo Final MicroDokumen80 halamanTrabajo Final MicroJonathan Valentin100% (1)
- Presentacion CADE SimuDokumen45 halamanPresentacion CADE SimuRubén Arribas MateoBelum ada peringkat
- Instrucciones Del PIC16F84ADokumen41 halamanInstrucciones Del PIC16F84AAlex LiebrenzBelum ada peringkat
- Saltos PDFDokumen19 halamanSaltos PDFCristhian CarrilloBelum ada peringkat
- 2 Programacion PLCDokumen33 halaman2 Programacion PLCHugo Ferney Alba DiazBelum ada peringkat
- Ejemplo GrafcetDokumen4 halamanEjemplo GrafcetEmilio BonnetBelum ada peringkat
- Salidas de Enganche y DesengancheDokumen7 halamanSalidas de Enganche y DesenganchejplutodBelum ada peringkat
- Micro 2x16 III Flash EpromdescasrgasDokumen18 halamanMicro 2x16 III Flash Epromdescasrgashector0% (1)
- Tema 1.1 PLC SDokumen22 halamanTema 1.1 PLC SMartín Arellano GómezBelum ada peringkat
- 01-PLC Tipos de Programación (Modo de Compatibilidad)Dokumen35 halaman01-PLC Tipos de Programación (Modo de Compatibilidad)brandonchipanaBelum ada peringkat
- Ejercicios de Integrales de Línea, Superficie y VolumenDari EverandEjercicios de Integrales de Línea, Superficie y VolumenPenilaian: 4 dari 5 bintang4/5 (2)
- Enfoque práctico de control moderno: Con aplicaciones en MatlabDari EverandEnfoque práctico de control moderno: Con aplicaciones en MatlabPenilaian: 5 dari 5 bintang5/5 (1)
- Simulación de circuitos electrónicos con OrCAD® PSpice®Dari EverandSimulación de circuitos electrónicos con OrCAD® PSpice®Belum ada peringkat
- Sitema KanbanDokumen92 halamanSitema KanbanHugo GandaraBelum ada peringkat
- 126 TemaII Laplace PDFDokumen36 halaman126 TemaII Laplace PDFHenry Raul Faz SimancasBelum ada peringkat
- Sistema KanbanDokumen92 halamanSistema KanbanJonathan Jimenez VargasBelum ada peringkat
- Fund A MentosDokumen24 halamanFund A MentosHugo GandaraBelum ada peringkat
- Sistema Lineales de Primer Orden (II)Dokumen12 halamanSistema Lineales de Primer Orden (II)petshopboysBelum ada peringkat
- Driver de Motor A Pasos Con L293dDokumen31 halamanDriver de Motor A Pasos Con L293dIbette De Leon RodriguezBelum ada peringkat
- Cualidades de La Redacción 2013Dokumen2 halamanCualidades de La Redacción 2013Ricardo Machaca CayoBelum ada peringkat
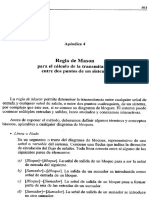
- Regla de MasonDokumen9 halamanRegla de MasonVictor PerugachiBelum ada peringkat
- Operaciones Binarias y de MemoriaDokumen16 halamanOperaciones Binarias y de MemoriaHugo GandaraBelum ada peringkat
- Step 7Dokumen19 halamanStep 7luisdamoBelum ada peringkat
- IntroDokumen30 halamanIntroHugo GandaraBelum ada peringkat
- Catalogo FresasDokumen20 halamanCatalogo FresasoluyarBelum ada peringkat
- Operaciones Con Bits de EstadoDokumen8 halamanOperaciones Con Bits de EstadoHugo GandaraBelum ada peringkat
- Operaciones de Temporizaci NDokumen14 halamanOperaciones de Temporizaci NlaputademiabuelaBelum ada peringkat
- 08 Circuitos de Primer Orden RL y RCDokumen23 halaman08 Circuitos de Primer Orden RL y RCMirgen MirandaBelum ada peringkat
- Partes Principales y Principio de Funcionamiento de Actuadores Hidraulicos PDFDokumen21 halamanPartes Principales y Principio de Funcionamiento de Actuadores Hidraulicos PDFHugo GandaraBelum ada peringkat
- Modelos Matematicos de Sistemas FisicosDokumen39 halamanModelos Matematicos de Sistemas Fisicosanabelenn93% (44)
- PLC'SDokumen29 halamanPLC'SGoyo ReyesBelum ada peringkat
- Ejercicios de DIseñoDokumen198 halamanEjercicios de DIseñoHugo GandaraBelum ada peringkat
- Modelos Matematicos de Sistemas FisicosDokumen39 halamanModelos Matematicos de Sistemas Fisicosanabelenn93% (44)
- Maquinas y Mecanismos UPMadridDokumen42 halamanMaquinas y Mecanismos UPMadridChamorro EstebanBelum ada peringkat
- MecanismosDokumen234 halamanMecanismosJ Eduardo Jemo100% (2)
- Libro mecanicaIIDokumen144 halamanLibro mecanicaIIderones13Belum ada peringkat
- Manual 021 Introduccinala NeumticaDokumen156 halamanManual 021 Introduccinala NeumticaMiguel Angel Santos PintadoBelum ada peringkat
- FRLDokumen3 halamanFRLMichael Chuquiruna MuñozBelum ada peringkat
- Compresores 1Dokumen18 halamanCompresores 1Hugo GandaraBelum ada peringkat
- FRLDokumen3 halamanFRLMichael Chuquiruna MuñozBelum ada peringkat
- Arduino + LabVIEWDokumen114 halamanArduino + LabVIEWrpcPC94% (17)
- 3 AplicaDokumen14 halaman3 AplicaHugo GandaraBelum ada peringkat
- Tarea Asíncronica N°1Dokumen7 halamanTarea Asíncronica N°1OVI OWNERBelum ada peringkat
- Evaluación T2 1ºESO2Dokumen4 halamanEvaluación T2 1ºESO2Maribel Martos GodinoBelum ada peringkat
- Modelacion de Estructuras I Sem 2020Dokumen2 halamanModelacion de Estructuras I Sem 2020Edgar AlfonsoBelum ada peringkat
- Practica Elementos de La ComunicacionDokumen3 halamanPractica Elementos de La ComunicacionClaudia Guerrero0% (1)
- Compcomunica U2Dokumen12 halamanCompcomunica U2yosetht77Belum ada peringkat
- Formulación Del ProblemaDokumen24 halamanFormulación Del Problema02-CF-HU-MARPS ALMENDRA REMUZGO PERALTABelum ada peringkat
- Capítulo 6 Métodos AbiertosDokumen28 halamanCapítulo 6 Métodos AbiertosReg Cano100% (1)
- Actividades Semana 5 y 6 Dianajai207Dokumen13 halamanActividades Semana 5 y 6 Dianajai207Diana DummieBelum ada peringkat
- GDGT GDGT-335 MaterialDokumen78 halamanGDGT GDGT-335 MaterialEren S12KBelum ada peringkat
- Etapa Contractual 043Dokumen193 halamanEtapa Contractual 043Jeovany bonilla montielBelum ada peringkat
- Expresión Verbal y No VerbalDokumen4 halamanExpresión Verbal y No VerbalJordy MorànBelum ada peringkat
- La Parábola Del Hijo PródigoDokumen14 halamanLa Parábola Del Hijo PródigoGuillermo Catter FarroBelum ada peringkat
- Módulo Historia de La Iglesia CorregidoDokumen83 halamanMódulo Historia de La Iglesia CorregidoLimber Rossi Escobar Quispe100% (1)
- IVM Guía2.ArgumentacionDokumen56 halamanIVM Guía2.ArgumentacionNicolás LabraBelum ada peringkat
- MazoMaria RelatosbrujaszaragozaantioquiaimaginariosimbolorepresentacionDokumen152 halamanMazoMaria RelatosbrujaszaragozaantioquiaimaginariosimbolorepresentacionElusinosBelum ada peringkat
- Álgebra JOHN NASH (Parte I) PDFDokumen13 halamanÁlgebra JOHN NASH (Parte I) PDFRaúl CastroBelum ada peringkat
- Derivada Parte 2Dokumen10 halamanDerivada Parte 2ELIBER DIONISIO RODR�GUEZ GONZALESBelum ada peringkat
- Martín Fierro (Guía de Lectura)Dokumen4 halamanMartín Fierro (Guía de Lectura)Bettina Baima100% (1)
- Gesto Verbal y Poetica Gestual Los PrincDokumen30 halamanGesto Verbal y Poetica Gestual Los PrincAZAHAR MONTES MARTÍNBelum ada peringkat
- Taller de Ortografía N°2 1Dokumen18 halamanTaller de Ortografía N°2 1JHUVALY LUCIA TIZA BULLONBelum ada peringkat
- Silvia Chalco-Anexo para Analizar Segun El Formato Imryd-Semana 11Dokumen2 halamanSilvia Chalco-Anexo para Analizar Segun El Formato Imryd-Semana 11SILVIA ROSARIO CHALCO MENDOZA100% (1)
- Informe Gestion Documental y GTC 185Dokumen17 halamanInforme Gestion Documental y GTC 185Julieta GonzalezBelum ada peringkat
- Ananos y Wheeler - La Epistemologia FrancesaDokumen7 halamanAnanos y Wheeler - La Epistemologia FrancesaFabian TelloBelum ada peringkat
- ANALFABETISMODokumen20 halamanANALFABETISMOlorenaBelum ada peringkat
- RRPP 5 (Unidad IV)Dokumen9 halamanRRPP 5 (Unidad IV)gabriel pradoBelum ada peringkat
- Evaluacion en Trastornos de Habla PDFDokumen10 halamanEvaluacion en Trastornos de Habla PDFCamila Soto VelosoBelum ada peringkat
- Le - 31.01.2023Dokumen73 halamanLe - 31.01.2023JimmyBelum ada peringkat
- PentateucoDokumen7 halamanPentateucoMauriAntipaniBelum ada peringkat
- Cuentos Infantiles TradicionalesDokumen21 halamanCuentos Infantiles TradicionalesMiigüël VälënciiäBelum ada peringkat
- Modulo Ecuaciones PlanteamientoDokumen2 halamanModulo Ecuaciones PlanteamientoDiego Esteban Izquierdo CoronelBelum ada peringkat