Anda mungkin juga menyukai
- Sensorless Control of Permanent Magnet Synchronous Motor A Survey WWW - Daneshpajooh.irDokumen8 halamanSensorless Control of Permanent Magnet Synchronous Motor A Survey WWW - Daneshpajooh.ira1690074Belum ada peringkat
- Microcontroller Based Overcurrent Relay and Directional Overcurrent Relay With Ground Fault ProtectionDokumen7 halamanMicrocontroller Based Overcurrent Relay and Directional Overcurrent Relay With Ground Fault Protectiondebasishmee5808Belum ada peringkat
- Model and Applications For Harmonic Analysis of Ac/Dc Power Systems Coupled by Power Electronic Converters in High-Power Industrial DrivesDokumen5 halamanModel and Applications For Harmonic Analysis of Ac/Dc Power Systems Coupled by Power Electronic Converters in High-Power Industrial DrivesRavindranath NaikBelum ada peringkat
- IEEE PES 12plsdfa20mcmsamDokumen7 halamanIEEE PES 12plsdfa20mcmsamParameswararao BillaBelum ada peringkat
- Sensorless Vector Control of Induction Motor Using Direct Adaptive RNN Speed EstimatorDokumen9 halamanSensorless Vector Control of Induction Motor Using Direct Adaptive RNN Speed Estimatormechernene_aek9037Belum ada peringkat
- Estimacija Parametara Asinhronog MotoraDokumen7 halamanEstimacija Parametara Asinhronog Motoramitrovic010Belum ada peringkat
- Applsci 08 01073 PDFDokumen13 halamanApplsci 08 01073 PDFErsi Ago100% (1)
- Faculteit Der Elektrotechniek: Modelling and Identification of Single-And Double-Cage Induction MachinesDokumen144 halamanFaculteit Der Elektrotechniek: Modelling and Identification of Single-And Double-Cage Induction MachinesAmatek Teekay 特克纳Belum ada peringkat
- Elias Blue Journal 02Dokumen26 halamanElias Blue Journal 02María Alejandra Zapata MendozaBelum ada peringkat
- Model-Based Predictive Direct Power Control of Doubly Fed Induction GeneratorsDokumen11 halamanModel-Based Predictive Direct Power Control of Doubly Fed Induction GeneratorsMaroju Santosh KiranBelum ada peringkat
- Direct Torque Control of Inverter Fed PMSM Drive Using SVMDokumen7 halamanDirect Torque Control of Inverter Fed PMSM Drive Using SVMInternational Journal of Application or Innovation in Engineering & ManagementBelum ada peringkat
- New Sensor LessDokumen10 halamanNew Sensor LessAbhishek AgarwalBelum ada peringkat
- Arindam Seminar 11Dokumen6 halamanArindam Seminar 11Arindam BhattacharjeeBelum ada peringkat
- Archive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DriveDokumen6 halamanArchive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DrivePranav VyasBelum ada peringkat
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDokumen5 halamanDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourBelum ada peringkat
- A Modified Method For Tuning PID Controller For Buck-Boost ConverterDokumen7 halamanA Modified Method For Tuning PID Controller For Buck-Boost ConverterIJAERS JOURNALBelum ada peringkat
- Calculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsDokumen4 halamanCalculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsShakeel RanaBelum ada peringkat
- Speed Control of Induction Motor Fed From Wind Turbine Via Particle Swarm Optimization Based PI ControllerDokumen13 halamanSpeed Control of Induction Motor Fed From Wind Turbine Via Particle Swarm Optimization Based PI ControllerHanan MouchtakiriBelum ada peringkat
- 12.quantitative Power QualityDokumen10 halaman12.quantitative Power QualitySanthosh GuduruBelum ada peringkat
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsDokumen6 halamanA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviBelum ada peringkat
- Comparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveDokumen8 halamanComparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveMatanAbutbulBelum ada peringkat
- Design and Evaluation of PWM Control Circuits For DC AC Converters Using PSPICEDokumen3 halamanDesign and Evaluation of PWM Control Circuits For DC AC Converters Using PSPICEPeter PoorBelum ada peringkat
- Induction Motor Equivalent Circuit For Dynamic SimulationDokumen6 halamanInduction Motor Equivalent Circuit For Dynamic Simulationmareymorsy2822Belum ada peringkat
- Ijrte0205288291 PDFDokumen4 halamanIjrte0205288291 PDFPasupuleti SivakumarBelum ada peringkat
- Sliding Mode Control of Surface-Mount Permanent-Magnet Synchronous Motor Based On Error Model With Unknown LoadDokumen7 halamanSliding Mode Control of Surface-Mount Permanent-Magnet Synchronous Motor Based On Error Model With Unknown LoadDamla SarıtaşBelum ada peringkat
- Uncertainty Analysis of Power System Components Based On Stochastic Response SurfacesDokumen8 halamanUncertainty Analysis of Power System Components Based On Stochastic Response SurfacesHassan Ali Al SsadiBelum ada peringkat
- Robust Speed Sensorless Control of Doubly-Fed Induction Machine Based On Input-Output Feedback Linearization Control Using A Sliding-Mode ObserverDokumen9 halamanRobust Speed Sensorless Control of Doubly-Fed Induction Machine Based On Input-Output Feedback Linearization Control Using A Sliding-Mode ObservernaserhashemniaBelum ada peringkat
- Microcontroller Based Overcurrent Relay and Directional Overcurrent Relay With Ground Fault Protection PDFDokumen7 halamanMicrocontroller Based Overcurrent Relay and Directional Overcurrent Relay With Ground Fault Protection PDFarsalanhamidBelum ada peringkat
- Im Cordinate Csi CNTRLDokumen11 halamanIm Cordinate Csi CNTRLsandeepbabu28Belum ada peringkat
- On Sensorless Induction Motor Drives: Sliding Mode Observer and Output Feedback ControllerDokumen8 halamanOn Sensorless Induction Motor Drives: Sliding Mode Observer and Output Feedback ControllerRaja ReddyBelum ada peringkat
- A Discussion About A Start-Up Procedure of A Doubly-Fed Induction Generator SystemDokumen6 halamanA Discussion About A Start-Up Procedure of A Doubly-Fed Induction Generator Systemgirish19Belum ada peringkat
- EEE 1201 021 Doubly Fed Induction Wind Turbines PSCAD EMTDCDokumen6 halamanEEE 1201 021 Doubly Fed Induction Wind Turbines PSCAD EMTDCShruthi SaBelum ada peringkat
- Simulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelDokumen7 halamanSimulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelPabloNalogowskiBelum ada peringkat
- Parameter Estimation For Electric Motor Condition MonitoringDokumen12 halamanParameter Estimation For Electric Motor Condition MonitoringNatarajBelum ada peringkat
- Power Cable High Freq ModelDokumen7 halamanPower Cable High Freq ModelkrcdewanewBelum ada peringkat
- VF SynrmDokumen10 halamanVF SynrmMusical CreationsBelum ada peringkat
- Simplified Method For Short Circuit CalculationsDokumen4 halamanSimplified Method For Short Circuit Calculationshaiob100% (1)
- Department University Lag-: NamicDokumen7 halamanDepartment University Lag-: NamicSuhail ShahBelum ada peringkat
- Ga Speed and DQ Currnets Control of PMSM WithDokumen9 halamanGa Speed and DQ Currnets Control of PMSM Withhieuhuech1Belum ada peringkat
- Tute Lea 2013Dokumen6 halamanTute Lea 2013venkatachalamBelum ada peringkat
- Predictive Current Control of A Back-to-Back NPC Wind Energy Conversion System To Meet Low Voltage Ride-Through RequirementsDokumen6 halamanPredictive Current Control of A Back-to-Back NPC Wind Energy Conversion System To Meet Low Voltage Ride-Through RequirementsjimylihBelum ada peringkat
- Speed Regulation An Induction Motor Using Reference Adaptive ControlDokumen5 halamanSpeed Regulation An Induction Motor Using Reference Adaptive ControlAtakan OzturKBelum ada peringkat
- Particle Swarm Optimization Based Sliding Mode Control of Variable Speed Wind Energy Conversion SystemDokumen11 halamanParticle Swarm Optimization Based Sliding Mode Control of Variable Speed Wind Energy Conversion SystemBukan Syahrul Yasin LimpoBelum ada peringkat
- Modeling induction motors with Volterra neural networksDokumen10 halamanModeling induction motors with Volterra neural networksseshubabu_999Belum ada peringkat
- The Squirrel-Cage Induction Motor Model and Its Parameter Identification Via Steady and Dynamic TestsDokumen27 halamanThe Squirrel-Cage Induction Motor Model and Its Parameter Identification Via Steady and Dynamic TestsAhmed 7mamBelum ada peringkat
- A New Method of Voltage Sag and Swell Detection: Raj Naidoo, Member, IEEE, and Pragasen Pillay, Fellow, IEEEDokumen8 halamanA New Method of Voltage Sag and Swell Detection: Raj Naidoo, Member, IEEE, and Pragasen Pillay, Fellow, IEEEjcrodriguez83Belum ada peringkat
- Condition Monitoring and Fault Diagnosis of Induction MotorDokumen4 halamanCondition Monitoring and Fault Diagnosis of Induction MotorFelix RiestraBelum ada peringkat
- Jeas 0408 94Dokumen7 halamanJeas 0408 94Jun Chee LimBelum ada peringkat
- Comparison of DTC and FOCDokumen5 halamanComparison of DTC and FOCJuseverck JuniorBelum ada peringkat
- Electro HydraulicDokumen20 halamanElectro HydraulicAnkit KumarBelum ada peringkat
- 12 August 2008Dokumen11 halaman12 August 2008Annas QureshiBelum ada peringkat
- Digital Differential Relaying Scheme For Teed Circuits Based On Voltage and Current Signal ComparisonDokumen10 halamanDigital Differential Relaying Scheme For Teed Circuits Based On Voltage and Current Signal ComparisonKumar DhirajBelum ada peringkat
- Novel Rotor-Side Control Scheme For Doubly Fed Induction Generator To Ride Through Grid FaultsDokumen7 halamanNovel Rotor-Side Control Scheme For Doubly Fed Induction Generator To Ride Through Grid FaultsYazan AlsmadiBelum ada peringkat
- Paper IET1990 PDFDokumen9 halamanPaper IET1990 PDFMecherneneBelum ada peringkat
- Vieira 2010Dokumen9 halamanVieira 2010Youssef MajdoubBelum ada peringkat
- A Novel Induction Machine ModelDokumen16 halamanA Novel Induction Machine ModelManikanta BondadaBelum ada peringkat
- Control of A Wind Energy Conversion System Associated To A Flywheel Energy Storage SystemDokumen6 halamanControl of A Wind Energy Conversion System Associated To A Flywheel Energy Storage SystemhassenbbBelum ada peringkat
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDari EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlPenilaian: 5 dari 5 bintang5/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDari EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetPenilaian: 2 dari 5 bintang2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDari EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetBelum ada peringkat
- TRDokumen1 halamanTRStephen BridgesBelum ada peringkat
- (Gob) 1zse 2750-102 en Rev 8Dokumen24 halaman(Gob) 1zse 2750-102 en Rev 8Dante FilhoBelum ada peringkat
- Section & Clearance PDFDokumen1 halamanSection & Clearance PDFStephen BridgesBelum ada peringkat
- RAYCHEM - EPKT Terminations: Termination Systems For Polymeric and MIND Paper Insulated Cables From 7.2kV Up To 36kVDokumen1 halamanRAYCHEM - EPKT Terminations: Termination Systems For Polymeric and MIND Paper Insulated Cables From 7.2kV Up To 36kVStephen BridgesBelum ada peringkat
- Raychem WCSM - Heavy Wall Adhesive Lined Heat Shrink: Product/Size Application Range A H A B W A B PDokumen1 halamanRaychem WCSM - Heavy Wall Adhesive Lined Heat Shrink: Product/Size Application Range A H A B W A B PStephen BridgesBelum ada peringkat
- Overall Summary of All Cables & Terminations Tested at Shree Power, Ras (August 2013)Dokumen3 halamanOverall Summary of All Cables & Terminations Tested at Shree Power, Ras (August 2013)Stephen BridgesBelum ada peringkat
- 220KV CABLE SPECDokumen9 halaman220KV CABLE SPECanurag_pugaliaaBelum ada peringkat
- Tower ParticularsDokumen20 halamanTower ParticularsStephen BridgesBelum ada peringkat
- 1.9.6 Cables Specifications (Type Designation-HT)Dokumen2 halaman1.9.6 Cables Specifications (Type Designation-HT)anurag_pugaliaaBelum ada peringkat
- Short Circuit Fault Transient Studies of Power Distribution Systems Including Dispersed GenerationDokumen5 halamanShort Circuit Fault Transient Studies of Power Distribution Systems Including Dispersed Generationspk53Belum ada peringkat
- Employee List with Names and Sr. NoDokumen11.664 halamanEmployee List with Names and Sr. NoStephen BridgesBelum ada peringkat
- Bbit/Bptm: Busbar Insulating Tubing (5-35 KV)Dokumen1 halamanBbit/Bptm: Busbar Insulating Tubing (5-35 KV)Stephen BridgesBelum ada peringkat
- Table 7: Series Reactor and Shunt Capacitor BankDokumen3 halamanTable 7: Series Reactor and Shunt Capacitor BankStephen BridgesBelum ada peringkat
- Calculation of Lightning Flashovers and Backflash Level ON 230Kv Transmission LinesDokumen7 halamanCalculation of Lightning Flashovers and Backflash Level ON 230Kv Transmission LinesMahendra PatelBelum ada peringkat
- High Volt Protection PDFDokumen1 halamanHigh Volt Protection PDFStephen BridgesBelum ada peringkat
- Generator Rswm2x23 MWDokumen9 halamanGenerator Rswm2x23 MWStephen BridgesBelum ada peringkat
- 220kV Double Circuit Transmission Line Tower DesignDokumen2 halaman220kV Double Circuit Transmission Line Tower DesignStephen BridgesBelum ada peringkat
- 001 - Annexure 1 - Design ParametersDokumen4 halaman001 - Annexure 1 - Design ParametersStephen BridgesBelum ada peringkat
- 2000 Ga Tech PaperDokumen24 halaman2000 Ga Tech PaperAceel FitchBelum ada peringkat
- BWR-SPP DataformatDokumen33 halamanBWR-SPP DataformatStephen BridgesBelum ada peringkat
- TS - 132KV Bus - 200 MsDokumen10 halamanTS - 132KV Bus - 200 MsStephen BridgesBelum ada peringkat
- 002 - Annexure 2 - Scope Parameters SheetDokumen12 halaman002 - Annexure 2 - Scope Parameters SheetStephen BridgesBelum ada peringkat
- TS - 132KV Bus - 200 MsDokumen10 halamanTS - 132KV Bus - 200 MsStephen BridgesBelum ada peringkat
- Design Basis Report PDFDokumen27 halamanDesign Basis Report PDFStephen BridgesBelum ada peringkat
- Tan Delta TestingDokumen2 halamanTan Delta TestingNillutpal BoruahBelum ada peringkat
- Raipur CostDokumen10 halamanRaipur CostStephen BridgesBelum ada peringkat
- 21403GA - DWG ModelDokumen6 halaman21403GA - DWG ModelStephen BridgesBelum ada peringkat
- Si-COAT RTV Silicone Coating Superior PerformanceDokumen5 halamanSi-COAT RTV Silicone Coating Superior PerformanceStephen BridgesBelum ada peringkat
- 541378Dokumen18 halaman541378Stephen BridgesBelum ada peringkat
- Kohler 100reozmd GeneratorDokumen5 halamanKohler 100reozmd GeneratorkuraimundBelum ada peringkat
- User Manual for STI Series Power InvertersDokumen24 halamanUser Manual for STI Series Power InvertersGustavo SilvaBelum ada peringkat
- 1734 Um018 - en e PDFDokumen130 halaman1734 Um018 - en e PDFFERNANDOBelum ada peringkat
- Simocrane Drive Basedtechnology v10 Sp1Dokumen67 halamanSimocrane Drive Basedtechnology v10 Sp1Nakpane SonhayeBelum ada peringkat
- Latch/Unlatch Lab Experiment ReportDokumen11 halamanLatch/Unlatch Lab Experiment ReportIZZA JamalBelum ada peringkat
- XRF ManualDokumen160 halamanXRF Manualsaiful islamBelum ada peringkat
- Huawei Uae Interview QuestionDokumen6 halamanHuawei Uae Interview Questioninfo vistaBelum ada peringkat
- Department Hand BookDokumen157 halamanDepartment Hand BookAraveetiCSReddyBelum ada peringkat
- Module: Introduction To Solid State Physics and ElectronicsDokumen7 halamanModule: Introduction To Solid State Physics and Electronicsnahom teferaBelum ada peringkat
- Smart Thermostat: A6V10807602 - en - G Siemens AG 2018-07-17 Building TechnologiesDokumen20 halamanSmart Thermostat: A6V10807602 - en - G Siemens AG 2018-07-17 Building TechnologiesChehade KhouryBelum ada peringkat
- Chapter 3 Notes NBCAS511Dokumen18 halamanChapter 3 Notes NBCAS511Zilly cocoBelum ada peringkat
- Distortion MetricsDokumen34 halamanDistortion MetricsAhmed mohyBelum ada peringkat
- To Design and Simulate Priority EncoderDokumen6 halamanTo Design and Simulate Priority EncoderShubham GargBelum ada peringkat
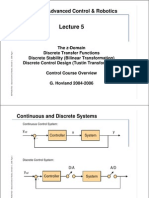
- Adv Control & Robotic Lec 5Dokumen31 halamanAdv Control & Robotic Lec 5key3hseBelum ada peringkat
- 3D System Components - Test: TroubleshootingDokumen8 halaman3D System Components - Test: TroubleshootingEshop ManualBelum ada peringkat
- 2131006Dokumen3 halaman2131006Janak TrivediBelum ada peringkat
- ADC DAC SlidesDokumen26 halamanADC DAC SlidesAnonymous 5JnIAXEVIBelum ada peringkat
- Pak Elektron Limited Technical Data Sheet of Transformer: SpecificationDokumen1 halamanPak Elektron Limited Technical Data Sheet of Transformer: SpecificationbilalBelum ada peringkat
- Use emergency generator portDokumen1 halamanUse emergency generator portlukky prasetyoBelum ada peringkat
- Lingunan High School Daily Lesson LogDokumen3 halamanLingunan High School Daily Lesson LogAlona AcotBelum ada peringkat
- Power System Protection Engineer ResumeDokumen4 halamanPower System Protection Engineer ResumeMuthuRajBelum ada peringkat
- Sharp Lc32bd6x LCD TV SMDokumen212 halamanSharp Lc32bd6x LCD TV SMkothuraBelum ada peringkat
- Electrical Engineer with 3+ Years ExperienceDokumen2 halamanElectrical Engineer with 3+ Years ExperienceSaad RashidBelum ada peringkat
- Reed's Basic Electrotechnology For Engineers PDFDokumen311 halamanReed's Basic Electrotechnology For Engineers PDFraovisam100% (2)
- KP Test 5D Dual PI ENDokumen4 halamanKP Test 5D Dual PI ENJorge Duran FidilioBelum ada peringkat
- 2002 Chevy Truck s10 t10 Blazer Evaporator Core ReplacementDokumen5 halaman2002 Chevy Truck s10 t10 Blazer Evaporator Core ReplacementKiddBelum ada peringkat
- Universal Powerline Bus: X-10 To Upb Migration DocumentDokumen25 halamanUniversal Powerline Bus: X-10 To Upb Migration DocumentCristopher PatricioBelum ada peringkat
- Ts Boost ConverterDokumen6 halamanTs Boost Converterala houamBelum ada peringkat
- DF11 CatalogDokumen14 halamanDF11 Catalogscualoboy2006Belum ada peringkat
- 4N65Dokumen9 halaman4N65Felipe Raul Chumpitaz GuevaraBelum ada peringkat