Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- SEPAM ProtectionDokumen14 halamanSEPAM ProtectionYigit SarıkayaBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- 36 KV 630 Din 42532 89 2606285Dokumen1 halaman36 KV 630 Din 42532 89 2606285Yigit SarıkayaBelum ada peringkat
- 7SR10 Argus FlyerDokumen2 halaman7SR10 Argus FlyerHoang EpuBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- 7XG22 2RMLG Catalogue SheetDokumen16 halaman7XG22 2RMLG Catalogue SheetHtun SoeBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- 1 KV 250 A 3150 Din 42530 67 3370221Dokumen2 halaman1 KV 250 A 3150 Din 42530 67 3370221Yigit SarıkayaBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
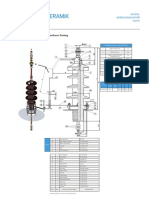
- 36 kV 250 А DIN 42531 Outdoor Transformer Bushing: Type Class a c g l1 Outdoor (f) Indoor (i)Dokumen1 halaman36 kV 250 А DIN 42531 Outdoor Transformer Bushing: Type Class a c g l1 Outdoor (f) Indoor (i)Yigit SarıkayaBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Page 10 117: Bas耂c HTML Vers耂onDokumen2 halamanPage 10 117: Bas耂c HTML Vers耂onYigit SarıkayaBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- SL Ref542plus (En) A 1vcp000060Dokumen63 halamanSL Ref542plus (En) A 1vcp000060Yigit SarıkayaBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- MiCOM IDMT Curves CalculatorDokumen2 halamanMiCOM IDMT Curves CalculatorYigit SarıkayaBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- F0126405 PB OLTCsDokumen24 halamanF0126405 PB OLTCsDEADMANBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Pac E100 Ayar KilavuzuDokumen15 halamanPac E100 Ayar KilavuzuYigit Sarıkaya0% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- GCRDokumen2 halamanGCRYigit SarıkayaBelum ada peringkat
- MiCOM IDMT Curves CalculatorDokumen2 halamanMiCOM IDMT Curves CalculatorYigit SarıkayaBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Bushing PDFDokumen92 halamanBushing PDFYigit SarıkayaBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- High Power SwitchesDokumen6 halamanHigh Power SwitchesYigit SarıkayaBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Terminal 01: External GridDokumen2 halamanTerminal 01: External GridYigit SarıkayaBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- DIgSILENT PDFDokumen1 halamanDIgSILENT PDFYigit SarıkayaBelum ada peringkat
- Brosura PTE-100-C Plus 1Dokumen1 halamanBrosura PTE-100-C Plus 1Yigit SarıkayaBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Sepam Series 40 Protective Relays: User's ManualDokumen256 halamanSepam Series 40 Protective Relays: User's ManualccrrzzBelum ada peringkat
- Hint: User Name and Password Are Case SensitiveDokumen1 halamanHint: User Name and Password Are Case SensitiveYigit SarıkayaBelum ada peringkat
- Products L3 Vac Contactors CPX CLX CBX V1 71016 enDokumen2 halamanProducts L3 Vac Contactors CPX CLX CBX V1 71016 enYigit SarıkayaBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Friem Industry en 07 2010Dokumen2 halamanFriem Industry en 07 2010Yigit SarıkayaBelum ada peringkat
- Cat Comp D EngDokumen3 halamanCat Comp D EngYigit SarıkayaBelum ada peringkat
- Transformer BushingsDokumen92 halamanTransformer BushingsYigit SarıkayaBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Promo Mors Smitt enDokumen20 halamanPromo Mors Smitt enYigit SarıkayaBelum ada peringkat
- Ac/Dc Converter: For The European Linear Particle Accelerator CERN Near GenevaDokumen1 halamanAc/Dc Converter: For The European Linear Particle Accelerator CERN Near GenevaYigit SarıkayaBelum ada peringkat
- ErneuerbareEnergien PROSP enDokumen8 halamanErneuerbareEnergien PROSP enYigit SarıkayaBelum ada peringkat
- MT860 AngDokumen2 halamanMT860 AngGuson KuntartoBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Bomb-280 enDokumen2 halamanBomb-280 enYigit SarıkayaBelum ada peringkat
- EW2.2 eDokumen6 halamanEW2.2 eYigit SarıkayaBelum ada peringkat
- Manual D12R - D6R - 3RDokumen139 halamanManual D12R - D6R - 3Rsalmo83:18Belum ada peringkat
- Control Components SiemensDokumen9 halamanControl Components SiemensCris DucusinBelum ada peringkat
- Course Plan and Evaluation Plan: Analog Electronics (3-1-0) 4Dokumen2 halamanCourse Plan and Evaluation Plan: Analog Electronics (3-1-0) 4Tarun VenkatBelum ada peringkat
- Contactless Tachomete R: Group Members: Moruboyina Alekhya Kodi Padmasree D.Hima VarshaDokumen11 halamanContactless Tachomete R: Group Members: Moruboyina Alekhya Kodi Padmasree D.Hima VarshaAswin Harippad100% (1)
- CSUN325-72P: Powerguard Insurance Global CoverageDokumen2 halamanCSUN325-72P: Powerguard Insurance Global CoverageFabiola RuizBelum ada peringkat
- CS 801D PDFDokumen4 halamanCS 801D PDFarnab paulBelum ada peringkat
- Saferstein CH 04 - Physical Properties Glass and SoilDokumen36 halamanSaferstein CH 04 - Physical Properties Glass and SoilLalit AmbasthaBelum ada peringkat
- Wilkinson Power DividerDokumen13 halamanWilkinson Power DividerMaira IslamBelum ada peringkat
- Argon Recovery From Silicon Crystal FurnaceDokumen7 halamanArgon Recovery From Silicon Crystal FurnaceasdfqwerBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Lobster Eye Hard X-Ray MirrorsDokumen36 halamanLobster Eye Hard X-Ray MirrorsmcanaliBelum ada peringkat
- Acs Error CodesDokumen3 halamanAcs Error CodesMalik udinBelum ada peringkat
- Flyback ConverterDokumen21 halamanFlyback Converterleechulmiu0% (1)
- 2007 H2 P2 SolutionsDokumen8 halaman2007 H2 P2 SolutionsRonnie QuekBelum ada peringkat
- Illustrated Assembly Manual k4003 Rev1 PDFDokumen12 halamanIllustrated Assembly Manual k4003 Rev1 PDFMilan MilosavljevićBelum ada peringkat
- Effect of Wind-Energy Power Injection Into Weak GridsDokumen7 halamanEffect of Wind-Energy Power Injection Into Weak GridsRoger RogerBelum ada peringkat
- Fiber Optics Ece Board ExamDokumen7 halamanFiber Optics Ece Board ExamSharon CarilloBelum ada peringkat
- Lab # 3 & 4Dokumen9 halamanLab # 3 & 4Engr Nauman Hakim KhanBelum ada peringkat
- Trends in Electric Vehicle Propulsion TechnologyDokumen28 halamanTrends in Electric Vehicle Propulsion TechnologyAlex Kariyil50% (2)
- Laser EfficiencyDokumen8 halamanLaser Efficiencykaushik4208100% (3)
- Lampiran A1 SD A5Dokumen466 halamanLampiran A1 SD A5Irfansyah MaladiBelum ada peringkat
- Automotive, Programmable Stepper Driver: Features and Benefits DescriptionDokumen45 halamanAutomotive, Programmable Stepper Driver: Features and Benefits DescriptionCHADDOU100% (1)
- TL494-D PWM Duty Cycle GenerationDokumen14 halamanTL494-D PWM Duty Cycle GenerationMashood NasirBelum ada peringkat
- Cfa L 1602 C Series Data SheetDokumen18 halamanCfa L 1602 C Series Data SheetRicofulLBelum ada peringkat
- 1N5819 SMDDokumen2 halaman1N5819 SMDHla Swe OoBelum ada peringkat
- E16SRXEU1 SchematicDokumen3 halamanE16SRXEU1 SchematicIstvan Fekete100% (2)
- Diodo 1.5keDokumen10 halamanDiodo 1.5keAve Fenix Renacer Ser LibreBelum ada peringkat
- Three Phase Rectifier Controllers Design (Step by Step)Dokumen44 halamanThree Phase Rectifier Controllers Design (Step by Step)Tshibain Tshibungu100% (1)
- 1 Syllabus EtoDokumen2 halaman1 Syllabus EtoVinay PrakashBelum ada peringkat
- Lead Metallurgy (From Heavy Non Ferrous Metals N. SEVRYUKOV)Dokumen24 halamanLead Metallurgy (From Heavy Non Ferrous Metals N. SEVRYUKOV)Tsakalakis G. KonstantinosBelum ada peringkat
- Mini Project Report SampleDokumen31 halamanMini Project Report SampleSachin RathodBelum ada peringkat
- Electronics All-in-One For Dummies, 3rd EditionDari EverandElectronics All-in-One For Dummies, 3rd EditionPenilaian: 5 dari 5 bintang5/5 (2)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosDari EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosPenilaian: 5 dari 5 bintang5/5 (1)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialDari EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialPenilaian: 3.5 dari 5 bintang3.5/5 (3)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeDari EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgePenilaian: 4.5 dari 5 bintang4.5/5 (9)