Anda mungkin juga menyukai
- Multiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsDari EverandMultiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsBelum ada peringkat
- Basic Concept System Identification Methods Procedures in System Identification ExamplesDokumen18 halamanBasic Concept System Identification Methods Procedures in System Identification ExamplesBikrobot BikeBelum ada peringkat
- System Identification: - A Criterion, or Verification FunctionDokumen14 halamanSystem Identification: - A Criterion, or Verification FunctionMona AliBelum ada peringkat
- Model EvaluationDokumen80 halamanModel EvaluationDeva Hema DBelum ada peringkat
- Myung Ohio State Model Selection MethodsDokumen76 halamanMyung Ohio State Model Selection MethodsSouparna MukhopadhyayBelum ada peringkat
- Empirical Methods in Finance Time Series Models Part 2: ARIMA Models by Sakshi SharmaDokumen49 halamanEmpirical Methods in Finance Time Series Models Part 2: ARIMA Models by Sakshi SharmaSakshi SharmaBelum ada peringkat
- Machine Learning ReportDokumen42 halamanMachine Learning ReportSandya Vb91% (11)
- What Is System Identification: Different Approaches To System Identification Depending On Model ClassDokumen48 halamanWhat Is System Identification: Different Approaches To System Identification Depending On Model ClassSuji RajanBelum ada peringkat
- Identification of Dynamic Systems and SeDokumen22 halamanIdentification of Dynamic Systems and SeDaniel Felipe Urdinila PatiñoBelum ada peringkat
- Introduction To (Demand) ForecastingDokumen39 halamanIntroduction To (Demand) Forecastinggeeths207Belum ada peringkat
- Basic Econometrics Revision - Econometric ModellingDokumen65 halamanBasic Econometrics Revision - Econometric ModellingTrevor ChimombeBelum ada peringkat
- Statistical Quality Control (SQC) FinalDokumen47 halamanStatistical Quality Control (SQC) FinalSagar DhageBelum ada peringkat
- Automatic ForecastingDokumen7 halamanAutomatic ForecastingRodrigo Vallejos VergaraBelum ada peringkat
- Modelling AssignmentDokumen5 halamanModelling AssignmentDaniel IlesBelum ada peringkat
- Test-Based Computational Model Updating of A Car Body in WhiteDokumen5 halamanTest-Based Computational Model Updating of A Car Body in Whiteuamiranda3518Belum ada peringkat
- ARIMA Modelling and Forecasting: By: Amar KumarDokumen22 halamanARIMA Modelling and Forecasting: By: Amar KumarAmar Kumar100% (1)
- Simulation in R PDFDokumen27 halamanSimulation in R PDFSachin Sachdeva100% (1)
- MD Presentation2Dokumen29 halamanMD Presentation2Fathi MusaBelum ada peringkat
- 2 IntroDokumen55 halaman2 IntroALBERT ZHANGBelum ada peringkat
- Model-Based Experimental Design For Biological Systems ModellingDokumen32 halamanModel-Based Experimental Design For Biological Systems ModellingMarcelo SilvaBelum ada peringkat
- Multiple Process Parameter Optimization of Wire Electric Discharge Machining Using Pca-Topsis, Topsis TechniquesDokumen48 halamanMultiple Process Parameter Optimization of Wire Electric Discharge Machining Using Pca-Topsis, Topsis Techniquessrinivas tumatiBelum ada peringkat
- Introduction To SEMDokumen64 halamanIntroduction To SEMThu LeBelum ada peringkat
- Linear Models - Numeric PredictionDokumen7 halamanLinear Models - Numeric Predictionar9vegaBelum ada peringkat
- AkaikeDokumen1 halamanAkaikedelwar28Belum ada peringkat
- Time Series Notes9Dokumen32 halamanTime Series Notes9Sam SkywalkerBelum ada peringkat
- JORDAAN2002 - Estimation of The Regularization Parameter For SVRDokumen6 halamanJORDAAN2002 - Estimation of The Regularization Parameter For SVRAnonymous PsEz5kGVaeBelum ada peringkat
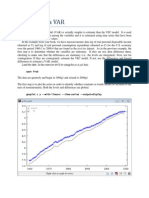
- Estimating A VAR - GretlDokumen9 halamanEstimating A VAR - Gretlkaddour7108Belum ada peringkat
- Dimensional Analysis PDFDokumen21 halamanDimensional Analysis PDFUmair Khan MarwatBelum ada peringkat
- Response Surface Methodology and MINITABDokumen22 halamanResponse Surface Methodology and MINITABarunsunder100% (1)
- Distillation Column Identification Control Using Wiener ModelDokumen5 halamanDistillation Column Identification Control Using Wiener ModelChristiam Morales AlvaradoBelum ada peringkat
- Regression Analysis WebinarDokumen58 halamanRegression Analysis WebinarBethany RobinsonBelum ada peringkat
- Ex 2 SolutionDokumen13 halamanEx 2 SolutionMian AlmasBelum ada peringkat
- STA302 Week12 FullDokumen30 halamanSTA302 Week12 Fulltianyuan guBelum ada peringkat
- DATT - Class 05 - Assignment - GR 9Dokumen9 halamanDATT - Class 05 - Assignment - GR 9SAURABH SINGHBelum ada peringkat
- Chapter 8 - Two Dimensional ArraysDokumen22 halamanChapter 8 - Two Dimensional ArraysAhmadaliBelum ada peringkat
- Lect19 Applicationo of ProbbabilityDokumen8 halamanLect19 Applicationo of ProbbabilityMary BeachBelum ada peringkat
- Chap3 Part1 ClassificationDokumen38 halamanChap3 Part1 Classificationhoucem.swissiBelum ada peringkat
- ArimaDokumen21 halamanArimadondan123Belum ada peringkat
- A1 Tutorial Problems QE1 2015-16Dokumen11 halamanA1 Tutorial Problems QE1 2015-16Avelyn Tang100% (1)
- Modeling and Simulation: Raul - Ionel@etc - UptDokumen14 halamanModeling and Simulation: Raul - Ionel@etc - UpthassenbbBelum ada peringkat
- Model Parametrization: - Model Classification - General Model Structure - Uniqueness PropertiesDokumen16 halamanModel Parametrization: - Model Classification - General Model Structure - Uniqueness PropertiessmouhabBelum ada peringkat
- JML ArimaDokumen37 halamanJML Arimapg aiBelum ada peringkat
- Comparison of Various System Identification Methods For A MISO SystemDokumen16 halamanComparison of Various System Identification Methods For A MISO SystemSashank Varma JampanaBelum ada peringkat
- Levitin: Introduction To The Design and Analysis of AlgorithmsDokumen35 halamanLevitin: Introduction To The Design and Analysis of Algorithmsjani28cseBelum ada peringkat
- Untitled DocumentDokumen6 halamanUntitled DocumentAparna SinghBelum ada peringkat
- Teknik Komputasi (TEI 116) : 3 Sks Oleh: Husni Rois Ali, S.T., M.Eng. Noor Akhmad Setiawan, S.T., M.T., PH.DDokumen44 halamanTeknik Komputasi (TEI 116) : 3 Sks Oleh: Husni Rois Ali, S.T., M.Eng. Noor Akhmad Setiawan, S.T., M.T., PH.DblackzenyBelum ada peringkat
- Statistic ProcessDokumen39 halamanStatistic ProcessxredjokerxBelum ada peringkat
- DS 432 Assignment I 2020Dokumen7 halamanDS 432 Assignment I 2020sristi agrawalBelum ada peringkat
- Probabilistic Power Flow Module For PowerFactory DIgSILENTDokumen24 halamanProbabilistic Power Flow Module For PowerFactory DIgSILENTاحمد صالحBelum ada peringkat
- Chapter Seven: Verification and Validation TechniquesDokumen28 halamanChapter Seven: Verification and Validation TechniquesTesfahun GirmaBelum ada peringkat
- Final Stage For Cocomo Using PCADokumen8 halamanFinal Stage For Cocomo Using PCAVikas MahurkarBelum ada peringkat
- Final Exam ReviewDokumen46 halamanFinal Exam ReviewBalamurugan KarnanBelum ada peringkat
- ARIMA Modeling:: B-J ProcedureDokumen26 halamanARIMA Modeling:: B-J ProcedureMayank RawatBelum ada peringkat
- NARMAX Model Identification of A Palm Oil Biodiesel Engine Using Multi-Objective Optimization Differential EvolutionDokumen10 halamanNARMAX Model Identification of A Palm Oil Biodiesel Engine Using Multi-Objective Optimization Differential EvolutionYlm PtanaBelum ada peringkat
- Introduction To (Demand) ForecastingDokumen39 halamanIntroduction To (Demand) ForecastingAkhil NandakumarBelum ada peringkat
- Constructing ARMA Models in RstudioDokumen7 halamanConstructing ARMA Models in RstudioFernando Perez SavadorBelum ada peringkat
- ARIMA Modelling and ForecastingDokumen30 halamanARIMA Modelling and ForecastingRaymond SmithBelum ada peringkat
- Exp 4Dokumen10 halamanExp 4jayBelum ada peringkat
- 545 Control Theory III Lecture I PDFDokumen12 halaman545 Control Theory III Lecture I PDFTemidire AdesijiBelum ada peringkat
- Gate-Level Minimization: M.ShoaibDokumen61 halamanGate-Level Minimization: M.ShoaibShoaib MushtaqBelum ada peringkat
- Russian GrammarDokumen141 halamanRussian GrammarMatthew HatchBelum ada peringkat
- TruTrak Evolution Type II FINAL - Cleared 08aug12Dokumen2 halamanTruTrak Evolution Type II FINAL - Cleared 08aug12smouhabBelum ada peringkat
- Algo3DFusionsMems PDFDokumen5 halamanAlgo3DFusionsMems PDFsmouhabBelum ada peringkat
- ln200 PDFDokumen2 halamanln200 PDFsmouhabBelum ada peringkat
- Transient and Frequency AnalysisDokumen12 halamanTransient and Frequency AnalysissmouhabBelum ada peringkat
- Model Parametrization: - Model Classification - General Model Structure - Uniqueness PropertiesDokumen16 halamanModel Parametrization: - Model Classification - General Model Structure - Uniqueness PropertiessmouhabBelum ada peringkat
- Input SignalsDokumen31 halamanInput SignalssmouhabBelum ada peringkat
- Fourier AnalysisDokumen17 halamanFourier AnalysissmouhabBelum ada peringkat
- Summative Test in Practical Research 1Dokumen3 halamanSummative Test in Practical Research 1shyril santosBelum ada peringkat
- CHAPTER 3 MethologyDokumen6 halamanCHAPTER 3 MethologyMichael John BascoBelum ada peringkat
- Shoe PolishDokumen8 halamanShoe Polishandrea gail0% (1)
- Science and Scientific Method-1º ESO - 1 - 2022Dokumen3 halamanScience and Scientific Method-1º ESO - 1 - 2022Mateo BaetuBelum ada peringkat
- Kruskal Wallis Test PDFDokumen2 halamanKruskal Wallis Test PDFSreya Sanil100% (1)
- Lecture9 November18&19Dokumen41 halamanLecture9 November18&19Devon MoodyBelum ada peringkat
- Chapter 3 StatDokumen66 halamanChapter 3 StatKing charles jelord Cos-agonBelum ada peringkat
- Data Collection and PresentationDokumen58 halamanData Collection and PresentationArtdel De LugarBelum ada peringkat
- 172 421 1 PB PDFDokumen23 halaman172 421 1 PB PDFErikaBelum ada peringkat
- NAVEED StatisticsDokumen4 halamanNAVEED Statisticsyusha habibBelum ada peringkat
- 199.1 Notes For Quiz 2Dokumen4 halaman199.1 Notes For Quiz 2aku sexcBelum ada peringkat
- RJC H2 Bio Lecture Notes Book 1Dokumen114 halamanRJC H2 Bio Lecture Notes Book 1Greg TanBelum ada peringkat
- Tugas HukumDokumen6 halamanTugas HukumshillaBelum ada peringkat
- A Jobless Growth: Why Is Unemployment Still High in The Philippines?Dokumen33 halamanA Jobless Growth: Why Is Unemployment Still High in The Philippines?Lorie Anne AbalosBelum ada peringkat
- BRM 9e PPT CH 01 InstructorDokumen20 halamanBRM 9e PPT CH 01 InstructorKang ChaniBelum ada peringkat
- A. Central Tendency B. Dispersion C. None of The Above D. Both A and BDokumen4 halamanA. Central Tendency B. Dispersion C. None of The Above D. Both A and BBablu JamdarBelum ada peringkat
- Electron Microscopy: Introduction & HistoryDokumen24 halamanElectron Microscopy: Introduction & HistoryBhaskar GangulyBelum ada peringkat
- History of Library and Information Science A CommentaryDokumen7 halamanHistory of Library and Information Science A CommentaryArchivo RCBelum ada peringkat
- 1 A) Descriptive StatisticsDokumen6 halaman1 A) Descriptive StatisticsNiza CarledBelum ada peringkat
- 1st Chapter Dunham Book PDFDokumen13 halaman1st Chapter Dunham Book PDFabhiBelum ada peringkat
- Final File 2014 Haroon and JamshedDokumen4 halamanFinal File 2014 Haroon and JamshedMuhammad ImranBelum ada peringkat
- Iii Week 1Dokumen8 halamanIii Week 1c1716811Belum ada peringkat
- Sampling SukhatmeDokumen519 halamanSampling Sukhatmemerguna100% (1)
- Model Definition11Dokumen6 halamanModel Definition11k767Belum ada peringkat
- 1 Statistics and Probability g11 Quarter 4 Module 1 Test of HypothesisDokumen19 halaman1 Statistics and Probability g11 Quarter 4 Module 1 Test of HypothesisKarlo LlarenaBelum ada peringkat
- ANOVA T - TestDokumen19 halamanANOVA T - Testmilrosebatilo2012Belum ada peringkat
- MMW M6 Check-In-Activity2Dokumen3 halamanMMW M6 Check-In-Activity2Romyelle AmparoBelum ada peringkat
- Evolution 201Dokumen2 halamanEvolution 201Mohit RojekarBelum ada peringkat
- Xevo TQD SpecificationDokumen4 halamanXevo TQD Specificationchaerul.anwar554Belum ada peringkat
- Bio 1bDokumen27 halamanBio 1bapi-369331235Belum ada peringkat