Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- ThreePhaseTransformer EXP.Dokumen3 halamanThreePhaseTransformer EXP.Said OmanBelum ada peringkat
- IEEE Code of EthicsDokumen1 halamanIEEE Code of EthicsSaid OmanBelum ada peringkat
- Temperature MeasurementDokumen42 halamanTemperature MeasurementSaid OmanBelum ada peringkat
- The TimeDokumen1 halamanThe TimeSaid OmanBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Kdfi V1.4: User Manual (English)Dokumen12 halamanKdfi V1.4: User Manual (English)MATT WILDBelum ada peringkat
- Quick Guide For Jestronic 500 JT95 Belt Scale: Standard DisplayDokumen7 halamanQuick Guide For Jestronic 500 JT95 Belt Scale: Standard DisplayMamadou djibril BaBelum ada peringkat
- Chapter 1 IC ENGINE TESTING PDFDokumen56 halamanChapter 1 IC ENGINE TESTING PDFMahmoudKamalElshazlyBelum ada peringkat
- Manual Murphy PDFDokumen396 halamanManual Murphy PDFDewis Araujo Rodriguez100% (3)
- Igbt Hmi - Wincc Manual - v1.1Dokumen116 halamanIgbt Hmi - Wincc Manual - v1.1antonio_paredes_15Belum ada peringkat
- CNC Needle Cutter: Technology Workshop Craft Home Food Play Outside CostumesDokumen16 halamanCNC Needle Cutter: Technology Workshop Craft Home Food Play Outside Costumesadnan abdulmalikBelum ada peringkat
- 412ep PDFDokumen52 halaman412ep PDFADRAI KHARAL100% (1)
- CAT - C-12 (Prefix MBL, 2KS, CPD, or 8YF) .Prefix 9SMDokumen8 halamanCAT - C-12 (Prefix MBL, 2KS, CPD, or 8YF) .Prefix 9SMPhil B.Belum ada peringkat
- Manual Centrifuga LW ScientificDokumen4 halamanManual Centrifuga LW ScientificCatherine GuevaraBelum ada peringkat
- Manual Instalación FTDokumen60 halamanManual Instalación FTPablo Andres Rimmelin MarchantBelum ada peringkat
- Emerson Process Management - CSI - PHASE MEASUREMENTS-Fundamental Uses For Single and Cross Channel PhaseDokumen11 halamanEmerson Process Management - CSI - PHASE MEASUREMENTS-Fundamental Uses For Single and Cross Channel PhaseiesajitoBelum ada peringkat
- Swift - June 09 - 03 Instrument PanelDokumen56 halamanSwift - June 09 - 03 Instrument Panel2791957Belum ada peringkat
- 3126E Engine: Electrical Circuit DiagramDokumen9 halaman3126E Engine: Electrical Circuit DiagramPhil B.Belum ada peringkat
- Lab Manual Electrical Machines Lab PTUKDokumen151 halamanLab Manual Electrical Machines Lab PTUKTareq FoQhaBelum ada peringkat
- Cat 3306B DITA Propulsion PDFDokumen40 halamanCat 3306B DITA Propulsion PDFgeniusnetxxxx100% (1)
- Analog Gauge Connections For Digital Optimax ModelsDokumen6 halamanAnalog Gauge Connections For Digital Optimax ModelsGet SmartCraft100% (1)
- Evt Parameters - (03-2005) - Us-EnDokumen34 halamanEvt Parameters - (03-2005) - Us-EnChristian BedoyaBelum ada peringkat
- Manual of Fire Water Pump Control Box FPEC100: Chongqing Mebay Technology Co., LTDDokumen8 halamanManual of Fire Water Pump Control Box FPEC100: Chongqing Mebay Technology Co., LTDAnonymous vqsuRyBelum ada peringkat
- SK 24807Dokumen1 halamanSK 24807Jb100% (1)
- Basicele Electriciadad y SensoresDokumen41 halamanBasicele Electriciadad y SensoresCarcaustoCatt Benk100% (2)
- Suzuki 2017 Genuine Rigging Parts and AccessoriesDokumen29 halamanSuzuki 2017 Genuine Rigging Parts and AccessoriesJose Luis HuilaBelum ada peringkat
- Nissan XTrail T30 2005 Workshop ManualDokumen56 halamanNissan XTrail T30 2005 Workshop ManualAndre VP100% (2)
- Manual Honda Tci enDokumen3 halamanManual Honda Tci enΓιωργος ΤσακιρηςBelum ada peringkat
- MODULE 15 PART-4 QuestionsDokumen46 halamanMODULE 15 PART-4 QuestionsSam SirBelum ada peringkat
- Instrumentos PDFDokumen24 halamanInstrumentos PDFinstrumentacion.hsrBelum ada peringkat
- TG VI Pocket CardDokumen2 halamanTG VI Pocket Cardfelix3189100% (1)
- Crusader ECM 07Dokumen143 halamanCrusader ECM 07Giapy Phuc Tran100% (2)
- Wings Aerospace, LLC: Bell 212/412 Repair/Overhaul Capabilities ListDokumen6 halamanWings Aerospace, LLC: Bell 212/412 Repair/Overhaul Capabilities ListMahesh NahallageBelum ada peringkat
- Calibration Procedure For c-130 Engine 3403172-1 Inst TsDokumen18 halamanCalibration Procedure For c-130 Engine 3403172-1 Inst TsEliana GuzmanBelum ada peringkat
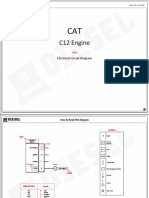
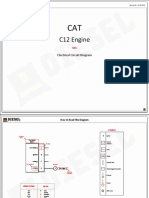
- C12 Engine: Electrical Circuit DiagramDokumen9 halamanC12 Engine: Electrical Circuit DiagramPhil B.Belum ada peringkat