Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Detroit GHG17 Heavy Duty Troubleshooting Manual PDFDokumen3.104 halamanDetroit GHG17 Heavy Duty Troubleshooting Manual PDFJoel Colter100% (17)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Turbo Expander TrainingDokumen58 halamanTurbo Expander TrainingM Joko Susilo100% (6)
- Vodafone Bid HBS Case - ExhibitsDokumen13 halamanVodafone Bid HBS Case - ExhibitsNaman PorwalBelum ada peringkat
- Maintenance of SubstationDokumen129 halamanMaintenance of Substationrama mohan100% (1)
- CG-SR SL Mechanical Drawing Ver1.40Dokumen28 halamanCG-SR SL Mechanical Drawing Ver1.40Jose Cardoso100% (1)
- KUKA Sim 30 Installation enDokumen49 halamanKUKA Sim 30 Installation enRégis Naydo0% (1)
- HMCA8745 Santa Fe Brochure Update WEBDokumen30 halamanHMCA8745 Santa Fe Brochure Update WEBengr_faheemBelum ada peringkat
- A Marker-Based Mean Finite Helical Axis ModelDokumen11 halamanA Marker-Based Mean Finite Helical Axis Modelengr_faheemBelum ada peringkat
- Hyundai Santro XingDokumen2 halamanHyundai Santro Xingamurali1965Belum ada peringkat
- Finite Element Analysis of Total Knee Replacement Considering Gait Cycle Load and MalalignmentDokumen196 halamanFinite Element Analysis of Total Knee Replacement Considering Gait Cycle Load and MalalignmentbgizachewBelum ada peringkat
- Kinetics of Transfemoral AmputeesDokumen9 halamanKinetics of Transfemoral Amputeesengr_faheemBelum ada peringkat
- Simulating What You SeeDokumen7 halamanSimulating What You Seeengr_faheemBelum ada peringkat
- Towards The Design of A Prosthetic Underactuated HandDokumen8 halamanTowards The Design of A Prosthetic Underactuated Handengr_faheemBelum ada peringkat
- Biomechanics of Forearm Rotation: Force and Efficiency of Pronator TeresDokumen9 halamanBiomechanics of Forearm Rotation: Force and Efficiency of Pronator Teresengr_faheemBelum ada peringkat
- Design of A Robotic Arm With Gripper & End EffectorDokumen6 halamanDesign of A Robotic Arm With Gripper & End Effectorengr_faheemBelum ada peringkat
- 1 s2.0 S0021929013002157 Main - 3Dokumen7 halaman1 s2.0 S0021929013002157 Main - 3engr_faheemBelum ada peringkat
- Shaaban 2006 JHS Load BearingDokumen6 halamanShaaban 2006 JHS Load Bearingengr_faheemBelum ada peringkat
- Robotic Gripper DesignDokumen4 halamanRobotic Gripper Designengr_faheemBelum ada peringkat
- Design of a Multi-Fingered Gripper for Irregular ObjectsDokumen8 halamanDesign of a Multi-Fingered Gripper for Irregular Objectsengr_faheemBelum ada peringkat
- AC DC RelaysDokumen2 halamanAC DC RelaysIsuru WijewardeneBelum ada peringkat
- MOD Robotic GripperDokumen8 halamanMOD Robotic Gripperengr_faheemBelum ada peringkat
- Design Fundamentals of A Reconfigurable Robotic GripperDokumen7 halamanDesign Fundamentals of A Reconfigurable Robotic Gripperengr_faheemBelum ada peringkat
- ReferenceGuide PDFDokumen3 halamanReferenceGuide PDFengr_faheemBelum ada peringkat
- Grippers and Lifting Mechanisms: Types and ApplicationsDokumen25 halamanGrippers and Lifting Mechanisms: Types and Applicationsengr_faheemBelum ada peringkat
- A Servo-Control-Gripper DesignDokumen8 halamanA Servo-Control-Gripper Designengr_faheemBelum ada peringkat
- Design Fundamentals of A Reconfigurable Robotic GripperDokumen7 halamanDesign Fundamentals of A Reconfigurable Robotic Gripperengr_faheemBelum ada peringkat
- Design Fundamentals of A Reconfigurable Robotic GripperDokumen7 halamanDesign Fundamentals of A Reconfigurable Robotic Gripperengr_faheemBelum ada peringkat
- Design Fundamentals of A Reconfigurable Robotic GripperDokumen7 halamanDesign Fundamentals of A Reconfigurable Robotic Gripperengr_faheemBelum ada peringkat
- Iprrobotics Newsletter June2013Dokumen3 halamanIprrobotics Newsletter June2013engr_faheemBelum ada peringkat
- Design Fundamentals of A Reconfigurable Robotic GripperDokumen7 halamanDesign Fundamentals of A Reconfigurable Robotic Gripperengr_faheemBelum ada peringkat
- Design Fundamentals of A Reconfigurable Robotic GripperDokumen7 halamanDesign Fundamentals of A Reconfigurable Robotic Gripperengr_faheemBelum ada peringkat
- Robotic Gripper DesignDokumen4 halamanRobotic Gripper Designengr_faheemBelum ada peringkat
- Multifinger Robotic HandDokumen9 halamanMultifinger Robotic Handujjwal_arora5Belum ada peringkat
- Design and Analysis of Magnetorheological GripperDokumen6 halamanDesign and Analysis of Magnetorheological Gripperengr_faheemBelum ada peringkat
- Design Fundamentals of A Reconfigurable Robotic GripperDokumen7 halamanDesign Fundamentals of A Reconfigurable Robotic Gripperengr_faheemBelum ada peringkat
- Numerical Simulations of The Effects of Non-Uniform Temperature Distributions On Lateral Torsional Buckling Resistance of Steel I-BeamsDokumen8 halamanNumerical Simulations of The Effects of Non-Uniform Temperature Distributions On Lateral Torsional Buckling Resistance of Steel I-BeamsReaditReaditBelum ada peringkat
- HMT Data Book-kothandaramanDokumen2 halamanHMT Data Book-kothandaramanNikhil T G0% (1)
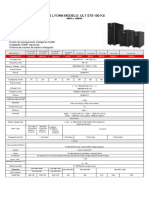
- Ups Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVADokumen1 halamanUps Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVASebastian Matias CruzBelum ada peringkat
- Technical Guide R-410A ZJ/ZR/ZF Series 15 - 25 TON 60 Hertz: DescriptionDokumen103 halamanTechnical Guide R-410A ZJ/ZR/ZF Series 15 - 25 TON 60 Hertz: DescriptionmanthoexBelum ada peringkat
- Chapter 3 - Methods of Analysis: N N N N A A A ADokumen15 halamanChapter 3 - Methods of Analysis: N N N N A A A AvampakkBelum ada peringkat
- Sand, Salt, IronDokumen1 halamanSand, Salt, IronKevin ChoyBelum ada peringkat
- L6565 DatasheetDokumen17 halamanL6565 DatasheetJose BenavidesBelum ada peringkat
- Straight Line MotionDokumen12 halamanStraight Line MotionMZWAABelum ada peringkat
- The Importance of Calculators in Math ClassDokumen6 halamanThe Importance of Calculators in Math Classchloe shanice bordiosBelum ada peringkat
- Midterm Exam Shuffled BasisDokumen5 halamanMidterm Exam Shuffled BasisJohnBelum ada peringkat
- Astm-e855 Изгиб МеталлаDokumen8 halamanAstm-e855 Изгиб МеталлаАлесь БуяковBelum ada peringkat
- TCL 55P607 CNET Review Calibration ResultsDokumen3 halamanTCL 55P607 CNET Review Calibration ResultsDavid KatzmaierBelum ada peringkat
- Xy6112 EtcDokumen4 halamanXy6112 EtcJalal AsadianBelum ada peringkat
- TG 7FS LTE A Product Data Sheet Final WEB WhiteDokumen2 halamanTG 7FS LTE A Product Data Sheet Final WEB WhiteMedSparkBelum ada peringkat
- CT-1 (Paper-1) - 09-Aug-15Dokumen63 halamanCT-1 (Paper-1) - 09-Aug-15HhjBelum ada peringkat
- Inverse Laplace Transformation Ex 11 2 Umer Asghar MethodDokumen34 halamanInverse Laplace Transformation Ex 11 2 Umer Asghar MethodSikandar Khan100% (1)
- Active FilterDokumen16 halamanActive FilterRam SankarBelum ada peringkat
- Problem Set 3 NonparaDokumen3 halamanProblem Set 3 NonparaRhia Mae TeporaBelum ada peringkat
- Pipesim Model Management Program: For Reservoir, Production, and Process ModelingDokumen2 halamanPipesim Model Management Program: For Reservoir, Production, and Process ModelingMauricio AlvaradoBelum ada peringkat
- High-Resolution Micromachined Interferometric AccelerometerDokumen75 halamanHigh-Resolution Micromachined Interferometric AccelerometerjitendraBelum ada peringkat
- (Advanced Techniques For 4G Systems) : Name: Alaa Ashraf Abdelmoneim Elagrody Sec: 1 ID:1Dokumen11 halaman(Advanced Techniques For 4G Systems) : Name: Alaa Ashraf Abdelmoneim Elagrody Sec: 1 ID:1alaa elagrodiBelum ada peringkat
- A Greener, Biocatalytic Benzoin Synthesis: Kenyon College - CHEM 234 - Organic Chemistry Lab IIDokumen2 halamanA Greener, Biocatalytic Benzoin Synthesis: Kenyon College - CHEM 234 - Organic Chemistry Lab IINicalyn BolanteBelum ada peringkat
- DIN-Rail AC Current Transducer 0.25% AccuracyDokumen3 halamanDIN-Rail AC Current Transducer 0.25% AccuracyjoseluisbeitoBelum ada peringkat
- H-I SUPER-DEHYDRATION WITH GLYCOLSDokumen15 halamanH-I SUPER-DEHYDRATION WITH GLYCOLSDiego1980bBelum ada peringkat