Anda mungkin juga menyukai
- Tabulacion 4 Ejes Colmena EstudiantesDokumen7 halamanTabulacion 4 Ejes Colmena EstudiantesNatali Nuñez Jaramillo100% (6)
- 11 Esquemas ElectricosDokumen26 halaman11 Esquemas ElectricosChang ChangBelum ada peringkat
- Listado Materiales Orona Arca2Dokumen2 halamanListado Materiales Orona Arca2joseBelum ada peringkat
- Tarjeta Serial ALAM 03 PDFDokumen4 halamanTarjeta Serial ALAM 03 PDFSchusterr BarrabasBelum ada peringkat
- Manual Cea36Dokumen120 halamanManual Cea36Orlando MedinaBelum ada peringkat
- Monta PlatosDokumen4 halamanMonta Platosmichael angeles siapoBelum ada peringkat
- Maquinas ElevadorasDokumen4 halamanMaquinas ElevadorasAlexsandro CenteioBelum ada peringkat
- Concepto Minminas 0037378 2016Dokumen3 halamanConcepto Minminas 0037378 2016Daima Nicola BahirBelum ada peringkat
- 1.8.-Sistde Nivel de LíqytermicoDokumen31 halaman1.8.-Sistde Nivel de LíqytermicoLeinerIvanBelum ada peringkat
- Tableros ElectricosDokumen64 halamanTableros Electricosjames100% (3)
- 01 - Descripción GeneralDokumen27 halaman01 - Descripción GeneralPedroBelum ada peringkat
- CMC3 Gearless PDFDokumen63 halamanCMC3 Gearless PDFJavier MartínezBelum ada peringkat
- Controlador de ascensores programable CEA51FB-AV manual de usuarioDokumen109 halamanControlador de ascensores programable CEA51FB-AV manual de usuarioJaydi ZambranoBelum ada peringkat
- ZDC57400 526esDokumen29 halamanZDC57400 526esMiguel AngelBelum ada peringkat
- 8-0906026 IesDokumen3 halaman8-0906026 IesCaroline CoelherBelum ada peringkat
- Presentación Ajuste de Frenos Maquinas PMS 280,300 y GTW 2 (TGT 300.)Dokumen17 halamanPresentación Ajuste de Frenos Maquinas PMS 280,300 y GTW 2 (TGT 300.)Jesus Barrera ABelum ada peringkat
- VelinoDokumen18 halamanVelinojames100% (2)
- Gxx1 TurcoDokumen38 halamanGxx1 TurcoFernando HerediaBelum ada peringkat
- Plataforma Salvaescalera Recta v16Dokumen8 halamanPlataforma Salvaescalera Recta v16Richar Bernardo Rocha CastilloBelum ada peringkat
- 11 - ANEXO B-Glosario Se TérminosDokumen3 halaman11 - ANEXO B-Glosario Se TérminosPedroBelum ada peringkat
- Fermator CatalogoDokumen210 halamanFermator Catalogohugosantos950% (2)
- Lista de Valores Del Variador Keb ResidenciasDokumen4 halamanLista de Valores Del Variador Keb ResidenciasJose Leornardo CondoriBelum ada peringkat
- OronaDokumen2 halamanOronaCaroline Coelher0% (1)
- Freno de Ascensor Con Máquina Otis Manipulado.Dokumen1 halamanFreno de Ascensor Con Máquina Otis Manipulado.Juan ascensorista100% (1)
- 02placas Conexionado ConectoresDokumen3 halaman02placas Conexionado ConectorestoufikBelum ada peringkat
- Memco Product Catalogue ES V06 DigitalDokumen24 halamanMemco Product Catalogue ES V06 Digitaldavid silvaBelum ada peringkat
- Brochure-Powertech ASCENSORESDokumen25 halamanBrochure-Powertech ASCENSORESMaks ReyesBelum ada peringkat
- MegomDokumen3 halamanMegomcoco MPBelum ada peringkat
- Puertas MP GoDokumen5 halamanPuertas MP GoJoséRodríguezBelum ada peringkat
- Yaskawa L 1000Dokumen76 halamanYaskawa L 1000juanBelum ada peringkat
- ASUNTO AVERIA 804 DESLIZAMIENTO EN POS II o III ODokumen4 halamanASUNTO AVERIA 804 DESLIZAMIENTO EN POS II o III OEl Guardian24HBelum ada peringkat
- 10 - Anexo A-Códigos de ErrorDokumen2 halaman10 - Anexo A-Códigos de ErrorPedroBelum ada peringkat
- Reporte de Inspección Rev2022061-1Dokumen12 halamanReporte de Inspección Rev2022061-1Hugo Mauro Mejia CasanaBelum ada peringkat
- Asc KoneDokumen3 halamanAsc KoneJuan AvendañoBelum ada peringkat
- Mini Act 2018 1Dokumen4 halamanMini Act 2018 1Juanfran GarciaBelum ada peringkat
- SchindlerDokumen45 halamanSchindlerHenry YJBelum ada peringkat
- PMS 400 PDFDokumen2 halamanPMS 400 PDFMaria Carla Lazo100% (1)
- Schindler Mantenimiento 2015Dokumen28 halamanSchindler Mantenimiento 2015Edgardo FloresBelum ada peringkat
- 0466016-Ies Uso Del Sistema de Socorro ORONA Con Maniobra ARCA IIDokumen37 halaman0466016-Ies Uso Del Sistema de Socorro ORONA Con Maniobra ARCA IIGuillermo DíazBelum ada peringkat
- Schindler 5300 EspDokumen24 halamanSchindler 5300 EspEdwin TobarBelum ada peringkat
- Guía Soporte para Preparación de La Obra para Modernizacion de AscensoresDokumen11 halamanGuía Soporte para Preparación de La Obra para Modernizacion de AscensoresGerman BlancoBelum ada peringkat
- Ascensores OtisDokumen6 halamanAscensores OtisPaul GuamanBelum ada peringkat
- Guia Rapida Instalacion Puerta Cabina BST ASMXDokumen7 halamanGuia Rapida Instalacion Puerta Cabina BST ASMXoro plataBelum ada peringkat
- Homelift Standard WITTURDokumen22 halamanHomelift Standard WITTURluigis36375Belum ada peringkat
- NTC 5926-1Dokumen41 halamanNTC 5926-1ricardoBelum ada peringkat
- DELTA - Manual Del Usario PDFDokumen26 halamanDELTA - Manual Del Usario PDFTheKauti0nBelum ada peringkat
- Irc 32 - 03Dokumen10 halamanIrc 32 - 03Eusebio EspinozaBelum ada peringkat
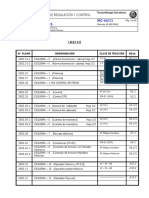
- 0466017-Ies Sistema de Regulacion de Velocidad Con Variador Control Technic Unidrive SPDokumen86 halaman0466017-Ies Sistema de Regulacion de Velocidad Con Variador Control Technic Unidrive SPGuillermo DíazBelum ada peringkat
- Catalogo Ascensores Unifamiliares EleserDokumen6 halamanCatalogo Ascensores Unifamiliares ElesergusequeBelum ada peringkat
- EE550Dokumen7 halamanEE550Marco AlgueraBelum ada peringkat
- As CensorDokumen20 halamanAs Censorstephanie_martinez_2Belum ada peringkat
- Ascensores panorámicos: soluciones estéticas y funcionalesDokumen17 halamanAscensores panorámicos: soluciones estéticas y funcionalesgimnasta1507100% (1)
- Manual Hidra V16 - Notas sobre el manualDokumen30 halamanManual Hidra V16 - Notas sobre el manualBLT ChuchinBelum ada peringkat
- 4 Reg y Montaje Hidra 2Dokumen22 halaman4 Reg y Montaje Hidra 2chiki_0Belum ada peringkat
- Pesacargas VK OmegaDokumen4 halamanPesacargas VK OmegaWalter Ariel Rodriguez Gonzalez100% (2)
- Orona Sistema de PosicionamientoDokumen51 halamanOrona Sistema de PosicionamientoRicardo MataBelum ada peringkat
- Barrera WecoDokumen4 halamanBarrera Wecogustavo sanchez100% (1)
- Encoder SRS50-HEA0-K21 1037083 Es PDFDokumen6 halamanEncoder SRS50-HEA0-K21 1037083 Es PDFJhuAnHuAmanBelum ada peringkat
- MP Montaje PDFDokumen18 halamanMP Montaje PDFjuanBelum ada peringkat
- 03 Prestaciones Del SistemaDokumen13 halaman03 Prestaciones Del Sistemagustavo sanchez100% (1)
- MACPUARSA Premontada Microbasic 1 PMBDokumen159 halamanMACPUARSA Premontada Microbasic 1 PMBPatricio MoralesBelum ada peringkat
- Motor Excitation ABBDokumen8 halamanMotor Excitation ABBPedro BancayanBelum ada peringkat
- F3020 ES 3514-Zwei SeitenDokumen48 halamanF3020 ES 3514-Zwei SeitenRicardo SGBelum ada peringkat
- PL 006 2DDokumen1 halamanPL 006 2Dmdcastroq_MCChBelum ada peringkat
- Perforación SumitomoDokumen18 halamanPerforación Sumitomomdcastroq_MCChBelum ada peringkat
- Como Produce CuDokumen6 halamanComo Produce CujuanfrienBelum ada peringkat
- Como Produce CuDokumen6 halamanComo Produce CujuanfrienBelum ada peringkat
- SepyconDokumen13 halamanSepyconFrancisco Jose AguirreBelum ada peringkat
- Modelo Molino HidrociclonDokumen6 halamanModelo Molino Hidrociclonchrmetalurgica403Belum ada peringkat
- Evolución moderna seguridad administraciónDokumen36 halamanEvolución moderna seguridad administraciónLuis SantibañezBelum ada peringkat
- JUSTIFICACION Celdas GalvánicasDokumen4 halamanJUSTIFICACION Celdas GalvánicasBlanca Alejandra EscobarBelum ada peringkat
- Sistema Hcci de MazdaDokumen3 halamanSistema Hcci de Mazdaleonardodaniel1994Belum ada peringkat
- Aplicaciones de La Geometría Analítica Secciones Cónicas.Dokumen20 halamanAplicaciones de La Geometría Analítica Secciones Cónicas.Eduardo OrellanaBelum ada peringkat
- Evolución de La Mecatronica en La Vida CotidianaDokumen8 halamanEvolución de La Mecatronica en La Vida CotidianaYuleidy Taborda ArroyaveBelum ada peringkat
- Obtener el circuito equivalente de un reactor linealDokumen6 halamanObtener el circuito equivalente de un reactor linealSebastián CastilloBelum ada peringkat
- JDR BabelDokumen128 halamanJDR BabelultronicmanBelum ada peringkat
- Informe Final de Responsabilidad Social-2019Dokumen42 halamanInforme Final de Responsabilidad Social-2019JUNIOR33% (3)
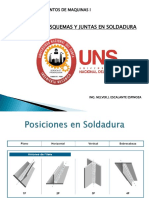
- 4ta Clase Teorica Esquemas PosicionesDokumen22 halaman4ta Clase Teorica Esquemas PosicionesChristian GarciaBelum ada peringkat
- Cuadro Formativo Maquinas Electricas HermesDokumen9 halamanCuadro Formativo Maquinas Electricas HermesUreña Personaje Jesus UreñaBelum ada peringkat
- Instalaciones plomería preciosDokumen4 halamanInstalaciones plomería preciosSergio Eduardo Armenta LópezBelum ada peringkat
- Practica Fisica 9 Ley de JouleDokumen6 halamanPractica Fisica 9 Ley de JouleChristopher LopezBelum ada peringkat
- PC1 Vite CristalografiaDokumen6 halamanPC1 Vite CristalografiaLENNIN ANDRES BENITES DE LA CRUZBelum ada peringkat
- Bitacora 2do. Parcial Transferencia de CalorDokumen18 halamanBitacora 2do. Parcial Transferencia de CalorPaulus BalcazarBelum ada peringkat
- Unalm Dip MetrologiaDokumen198 halamanUnalm Dip MetrologiaAlexander Alza ZamudioBelum ada peringkat
- Diseño y Construccion de Un Generador UltrasonicoDokumen12 halamanDiseño y Construccion de Un Generador UltrasonicoIvànn NuñezBelum ada peringkat
- Yodo: Medio Ambiente y SaludDokumen5 halamanYodo: Medio Ambiente y SaludSilvanaPerezBelum ada peringkat
- Practica 4Dokumen3 halamanPractica 4GiovanniSantamariaBelum ada peringkat
- LP 15 JUNIO 2015 Productos Eléctricos IndustrialesDokumen251 halamanLP 15 JUNIO 2015 Productos Eléctricos IndustrialesMilagros Mercedes Olmos CervantesBelum ada peringkat
- EnronDokumen32 halamanEnrongreisBelum ada peringkat
- Filosofia de Operacion y ControlDokumen32 halamanFilosofia de Operacion y Controljuanjose2987Belum ada peringkat
- VX250Dokumen48 halamanVX250jsus15559Belum ada peringkat
- Cálculo protecciones eléctricasDokumen77 halamanCálculo protecciones eléctricasJorge Tamayo MancillaBelum ada peringkat
- Electrotecnia 1Dokumen3 halamanElectrotecnia 1api-3713817Belum ada peringkat
- 2 Ajustes Protección DiferencialDokumen28 halaman2 Ajustes Protección DiferencialJesus MBelum ada peringkat
- Proyecto de Regasificación de Gas Natural LicuadoDokumen712 halamanProyecto de Regasificación de Gas Natural LicuadoJulio Morales100% (1)