Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Biomedical Instrumentation and MeasurementsDokumen536 halamanBiomedical Instrumentation and MeasurementsREXTERYX89% (162)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Velammal College of Engineering & Technology, Madurai: ST ND RD THDokumen1 halamanVelammal College of Engineering & Technology, Madurai: ST ND RD THkpkarthi80Belum ada peringkat
- IETE Idea Contest CertificateDokumen1 halamanIETE Idea Contest Certificatekpkarthi80Belum ada peringkat
- Agenda - STTP Series IIDokumen1 halamanAgenda - STTP Series IIkpkarthi80Belum ada peringkat
- 018 Vcet EceDokumen2 halaman018 Vcet Ecekpkarthi80Belum ada peringkat
- Iat1 deDokumen1 halamanIat1 dekpkarthi80Belum ada peringkat
- MMT Full TimeDokumen20 halamanMMT Full Timekpkarthi80Belum ada peringkat
- EC8392 DE Model Exam QuesDokumen2 halamanEC8392 DE Model Exam Queskpkarthi80Belum ada peringkat
- CBS Front PageDokumen1 halamanCBS Front Pagekpkarthi80Belum ada peringkat
- Ec8491 - CBSDokumen5 halamanEc8491 - CBSkpkarthi80Belum ada peringkat
- STTP Brochure - Series II-1Dokumen1 halamanSTTP Brochure - Series II-1kpkarthi80Belum ada peringkat
- I C I C C: Nternational Web Onference On Nnovations in Ommunication and OmputingDokumen2 halamanI C I C C: Nternational Web Onference On Nnovations in Ommunication and Omputingkpkarthi80Belum ada peringkat
- ML Applications To IoT Programme Schedule-STTP Series IIDokumen2 halamanML Applications To IoT Programme Schedule-STTP Series IIkpkarthi80Belum ada peringkat
- VLSIDokumen28 halamanVLSISurendhar SekarBelum ada peringkat
- Annual ReportDokumen83 halamanAnnual ReportHari PrasadBelum ada peringkat
- MEVLSIDesignDokumen23 halamanMEVLSIDesignMani Kandan PBelum ada peringkat
- MEVLSIDesignDokumen23 halamanMEVLSIDesignMani Kandan PBelum ada peringkat
- Special ElectivesDokumen146 halamanSpecial ElectivesHenri Dass100% (1)
- Cad Cam1 4Dokumen54 halamanCad Cam1 4Anandh ChettiarBelum ada peringkat
- Special ElectivesDokumen146 halamanSpecial ElectivesHenri Dass100% (1)
- Quadratic Equation 7Dokumen8 halamanQuadratic Equation 7kpkarthi80Belum ada peringkat
- GATE Exam Guide for ECE StudentsDokumen27 halamanGATE Exam Guide for ECE Studentskpkarthi80Belum ada peringkat
- Non Supsampled Contourlet TransformDokumen29 halamanNon Supsampled Contourlet Transformkpkarthi80Belum ada peringkat
- EEG MeasurementDokumen4 halamanEEG Measurementkpkarthi80Belum ada peringkat
- MQ137 Ammonia SensorDokumen3 halamanMQ137 Ammonia Sensorkpkarthi80Belum ada peringkat
- Electrical Characteristics 2Dokumen21 halamanElectrical Characteristics 2kpkarthi80Belum ada peringkat
- Medical Electronics Question PaperDokumen2 halamanMedical Electronics Question Paperkpkarthi80Belum ada peringkat
- ITR Paper PresentationDokumen18 halamanITR Paper Presentationkpkarthi80Belum ada peringkat
- Reconfigurable Architecture of 2D-Adpative Median Filter Based Image DenoisingDokumen6 halamanReconfigurable Architecture of 2D-Adpative Median Filter Based Image Denoisingkpkarthi80Belum ada peringkat
- Effective Noise Removal in Graylevel Image Using Joint Bilateral FilterDokumen6 halamanEffective Noise Removal in Graylevel Image Using Joint Bilateral Filterkpkarthi80Belum ada peringkat
- Application of Wavelet Synchrosqueezing TransformDokumen4 halamanApplication of Wavelet Synchrosqueezing TransformUma TamilBelum ada peringkat
- Sample Resume of Waqar BaigDokumen3 halamanSample Resume of Waqar Baigmuhammad azharBelum ada peringkat
- J Rse 2021 112414Dokumen14 halamanJ Rse 2021 112414anangwnBelum ada peringkat
- Idose4 - Whitepaper - Technical - Low Res - PDF Nodeid 8432599&vernum - 2 PDFDokumen40 halamanIdose4 - Whitepaper - Technical - Low Res - PDF Nodeid 8432599&vernum - 2 PDFOmarah AbdalqaderBelum ada peringkat
- Development of Detection Maturity Method in Carrot Varieties Cipanas Using - Wiliandi Saputro and Irsyad Faisal MutaqiDokumen6 halamanDevelopment of Detection Maturity Method in Carrot Varieties Cipanas Using - Wiliandi Saputro and Irsyad Faisal MutaqiWiliandi SaputroBelum ada peringkat
- ML Assignment PresentationDokumen37 halamanML Assignment PresentationpitchappanBelum ada peringkat
- Video Enhancement with Task-Oriented FlowDokumen20 halamanVideo Enhancement with Task-Oriented FlowKamal SwamiBelum ada peringkat
- Underwater Image Enhancement Based On Structure-Texture DecompositionDokumen5 halamanUnderwater Image Enhancement Based On Structure-Texture DecompositionYamini KorlaguntaBelum ada peringkat
- Engineering Applications of Artificial Intelligence: Saijie Fan, Wei Liang, Derui Ding, Hui YuDokumen11 halamanEngineering Applications of Artificial Intelligence: Saijie Fan, Wei Liang, Derui Ding, Hui YuSameer AhmedBelum ada peringkat
- Threshold and WaveletDokumen4 halamanThreshold and WaveletEati Iswarya LakshmiBelum ada peringkat
- P. Rakwatin, W. Takeuchi, and Y. Yasuoka, "Stripe Noise Reduction inDokumen13 halamanP. Rakwatin, W. Takeuchi, and Y. Yasuoka, "Stripe Noise Reduction inSachin VaradhanBelum ada peringkat
- White Paper Hotbar CognexDokumen8 halamanWhite Paper Hotbar CognexraptorBelum ada peringkat
- Hearing Aid System Using MatlabDokumen6 halamanHearing Aid System Using MatlabAbhishek ChedeBelum ada peringkat
- Unit 4Dokumen38 halamanUnit 4Ishani RoyBelum ada peringkat
- 通过用于医学图像分割的预分割扩散采样加速扩散模型Dokumen5 halaman通过用于医学图像分割的预分割扩散采样加速扩散模型Zx LiuBelum ada peringkat
- PCon - Planner 8.1 FeaturesDokumen11 halamanPCon - Planner 8.1 FeaturesJosé Juan Martínez TorresBelum ada peringkat
- Underwater 3D Reconstruction Using BlueView Imaging SonarDokumen7 halamanUnderwater 3D Reconstruction Using BlueView Imaging SonarGuilherme OliveiraBelum ada peringkat
- 2002 Ford Mustang Owners ManualDokumen256 halaman2002 Ford Mustang Owners Manualcnodaddy100% (1)
- Restoration Suite 2: User GuideDokumen19 halamanRestoration Suite 2: User GuidekosarobBelum ada peringkat
- User Manual For Darktable ToolDokumen124 halamanUser Manual For Darktable ToolmishraanadiBelum ada peringkat
- CC7 Training PDFDokumen24 halamanCC7 Training PDFphong nguyễn báBelum ada peringkat
- Hearing Aids System For Impaired Peoples: January 2004Dokumen5 halamanHearing Aids System For Impaired Peoples: January 2004Anvitha LokepalliBelum ada peringkat
- Speckle Noise Reduction in Ultrasound Images Using SRAD and Guided FilterDokumen4 halamanSpeckle Noise Reduction in Ultrasound Images Using SRAD and Guided FilterReemaBelum ada peringkat
- 1 IPC-B2B20-ZS Datasheet 20181009Dokumen3 halaman1 IPC-B2B20-ZS Datasheet 20181009Ruben SBBelum ada peringkat
- Vista VEC400CM CamerasDokumen2 halamanVista VEC400CM CamerasAbdelhamid SammoudiBelum ada peringkat
- A Simple Introduction of Active Contour Without Edges - Rex's Tribe of Image ProcessingDokumen22 halamanA Simple Introduction of Active Contour Without Edges - Rex's Tribe of Image ProcessingChiraz AjmiBelum ada peringkat
- Car Plate Recognition by Neural Networks and Image Processing Using Integration of WaveletsDokumen5 halamanCar Plate Recognition by Neural Networks and Image Processing Using Integration of Waveletsjamal fathiBelum ada peringkat
- Low-Light Image Enhancement Methods for Multi-Sensor SystemsDokumen26 halamanLow-Light Image Enhancement Methods for Multi-Sensor SystemsEdBelum ada peringkat
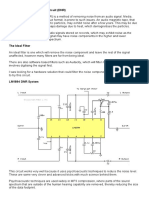
- Dynamic Noise Reduction Circuit (DNR) Removes Audio NoiseDokumen2 halamanDynamic Noise Reduction Circuit (DNR) Removes Audio Noisedetroit_me2553Belum ada peringkat
- DeepFilterNet2205 05474Dokumen5 halamanDeepFilterNet2205 05474灯火Belum ada peringkat