Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Everything You Need to Know About IELTS in 40 WordsDokumen43 halamanEverything You Need to Know About IELTS in 40 WordsPushan Kumar DattaBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
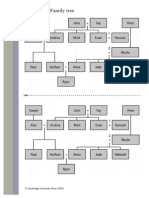
- Box 15.3a: Family Tree: © Cambridge University Press 2009Dokumen1 halamanBox 15.3a: Family Tree: © Cambridge University Press 2009Pushan Kumar DattaBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- CountersDokumen36 halamanCountersPushan Kumar DattaBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- It Encompasses Three Principles: Design Out Toxins, Waste and Pollution Keep Products and Materials in Use Regenerate Natural SystemsDokumen12 halamanIt Encompasses Three Principles: Design Out Toxins, Waste and Pollution Keep Products and Materials in Use Regenerate Natural SystemsPushan Kumar DattaBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Box 15.3b: Family Tree: © Cambridge University Press 2009Dokumen1 halamanBox 15.3b: Family Tree: © Cambridge University Press 2009Pushan Kumar DattaBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Box 11.2.3c: Shopping: © Cambridge University Press 2009Dokumen1 halamanBox 11.2.3c: Shopping: © Cambridge University Press 2009Pushan Kumar DattaBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- English CertDokumen2 halamanEnglish CertPushan Kumar DattaBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Motivation Let Eris TDokumen3 halamanMotivation Let Eris TPushan Kumar DattaBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Motivation Letter IntactDokumen4 halamanMotivation Letter IntactPushan Kumar DattaBelum ada peringkat
- Box 11.2.4b: Finding Investment Partners: © Cambridge University Press 2009Dokumen1 halamanBox 11.2.4b: Finding Investment Partners: © Cambridge University Press 2009Pushan Kumar DattaBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Box 14.1.5b: Pictures Into Story: © Cambridge University Press 2009Dokumen1 halamanBox 14.1.5b: Pictures Into Story: © Cambridge University Press 2009Pushan Kumar DattaBelum ada peringkat
- Box 10.3a PDFDokumen1 halamanBox 10.3a PDFPushan Kumar DattaBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Box 9.7: Modal Symbols: © Cambridge University Press 2009Dokumen1 halamanBox 9.7: Modal Symbols: © Cambridge University Press 2009Pushan Kumar DattaBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Box 14.1.6c: Putting Stories in Order: © Cambridge University Press 2009Dokumen1 halamanBox 14.1.6c: Putting Stories in Order: © Cambridge University Press 2009Pushan Kumar DattaBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Box 11.1.3: Occupations: © Cambridge University Press 2009Dokumen1 halamanBox 11.1.3: Occupations: © Cambridge University Press 2009Pushan Kumar DattaBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Similarities Box 11.3.2aDokumen1 halamanSimilarities Box 11.3.2aPushan Kumar DattaBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Box 16.5b: Describe and Arrange: © Cambridge University Press 2009Dokumen1 halamanBox 16.5b: Describe and Arrange: © Cambridge University Press 2009Pushan Kumar DattaBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- Box 11.2.3a: Shopping: © Cambridge University Press 2009Dokumen1 halamanBox 11.2.3a: Shopping: © Cambridge University Press 2009Pushan Kumar DattaBelum ada peringkat
- Hindu Believers Support Adult Stem Cell Research Because They Believe Life Begins at ConceptionDokumen2 halamanHindu Believers Support Adult Stem Cell Research Because They Believe Life Begins at ConceptionPushan Kumar DattaBelum ada peringkat
- Assignment Applied ElectronicsDokumen6 halamanAssignment Applied ElectronicsPushan Kumar DattaBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Box 19.2: Relative Quizzes: © Cambridge University Press 2009Dokumen1 halamanBox 19.2: Relative Quizzes: © Cambridge University Press 2009Pushan Kumar DattaBelum ada peringkat
- Box 19.4a: Extending A Story: © Cambridge University Press 2009Dokumen1 halamanBox 19.4a: Extending A Story: © Cambridge University Press 2009Pushan Kumar DattaBelum ada peringkat
- Box 16.8b: Who's She Talking To?: © Cambridge University Press 2009Dokumen1 halamanBox 16.8b: Who's She Talking To?: © Cambridge University Press 2009Pushan Kumar DattaBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- UTMDokumen17 halamanUTMPushan Kumar DattaBelum ada peringkat
- PPPT PresentationDokumen1 halamanPPPT PresentationPushan Kumar DattaBelum ada peringkat
- RSVP Protocol Operation in MPLSDokumen2 halamanRSVP Protocol Operation in MPLSPushan Kumar DattaBelum ada peringkat
- Selling Using EbayDokumen2 halamanSelling Using EbayPushan Kumar DattaBelum ada peringkat
- Describe The Courses You Have Taught by Summarizing The Course Content and Assignments Required. Subjects I Will Be Comfortable To TeachDokumen15 halamanDescribe The Courses You Have Taught by Summarizing The Course Content and Assignments Required. Subjects I Will Be Comfortable To TeachPushan Kumar DattaBelum ada peringkat
- Nice Training Pro Spec UsDokumen12 halamanNice Training Pro Spec UsPushan Kumar DattaBelum ada peringkat
- DNSDokumen29 halamanDNSPushan Kumar DattaBelum ada peringkat
- Isotope GeochemistryDokumen44 halamanIsotope GeochemistrygengkapakBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Archaeology Dating MethodsDokumen112 halamanArchaeology Dating MethodsrdfaderaBelum ada peringkat
- Historical Geology BookDokumen224 halamanHistorical Geology BookhoogggleeeBelum ada peringkat
- (KArLE) in Situ Geochronology - RASHED TORRESDokumen6 halaman(KArLE) in Situ Geochronology - RASHED TORRESRashed Manzur Torres RodriguezBelum ada peringkat
- Radiometric Dating Techniques ExplainedDokumen33 halamanRadiometric Dating Techniques ExplainedZul AtfiBelum ada peringkat
- K-Ar Age Quaternary: Determinations of Late Andean Volcanic Rocks, Tertiary and Southern PeruDokumen7 halamanK-Ar Age Quaternary: Determinations of Late Andean Volcanic Rocks, Tertiary and Southern Peruwilliams mataBelum ada peringkat
- The 40Ar*/39Ar Dating MethodDokumen515 halamanThe 40Ar*/39Ar Dating MethodCristiano Padalino Galeazzi100% (4)
- Earth Science Olympiad Material (Materi Olimpiade Kebumian)Dokumen10 halamanEarth Science Olympiad Material (Materi Olimpiade Kebumian)laciferista100% (1)
- VK JAIN Prehistory and Protohistory ANCEINT INDIADokumen228 halamanVK JAIN Prehistory and Protohistory ANCEINT INDIANaina85% (13)
- Cornejo, P., Et Al - 2003 PDFDokumen13 halamanCornejo, P., Et Al - 2003 PDFJonathan Esteban Fuentealba DiazBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Rajmahal Traps PetrogenesisDokumen18 halamanRajmahal Traps PetrogenesisPiyush GuptaBelum ada peringkat
- Clocks in Rocks? - ICRDokumen50 halamanClocks in Rocks? - ICR7ett_Belum ada peringkat
- Syllabus Archaeology of RwandaDokumen51 halamanSyllabus Archaeology of RwandaPatrick RennyBelum ada peringkat
- K - Ar DatingDokumen7 halamanK - Ar Datingsava sintyaBelum ada peringkat
- Archaeology Dating MethodsDokumen120 halamanArchaeology Dating MethodsNuman AnwarBelum ada peringkat
- Course Notes For GeophysicsDokumen30 halamanCourse Notes For GeophysicsShivendra Pratap SinghBelum ada peringkat
- Radiometric Dating: Radioactive DecayDokumen13 halamanRadiometric Dating: Radioactive DecayAbhijit Kar GuptaBelum ada peringkat
- Radiogenic Isotope GeologyDokumen79 halamanRadiogenic Isotope GeologyRoshanBelum ada peringkat
- Form 1 History Simplified NotesDokumen195 halamanForm 1 History Simplified Notesmicah isabokeBelum ada peringkat
- Geophysics NotesDokumen46 halamanGeophysics NotesHoidi Shitakwa ZachariaBelum ada peringkat
- Physical Geology 2nd Edition Chapter 8 Measuring Geological TimeDokumen36 halamanPhysical Geology 2nd Edition Chapter 8 Measuring Geological TimeJenny Rose OliverosBelum ada peringkat
- K R DatingDokumen22 halamanK R DatingMher BuenaflorBelum ada peringkat
- Potassium-Argon Dating ExplainedDokumen16 halamanPotassium-Argon Dating ExplainedMichael PorcaBelum ada peringkat
- Dating Rocks and Fossils Using Geologic Methods - Learn Science at Scitabl122629Dokumen7 halamanDating Rocks and Fossils Using Geologic Methods - Learn Science at Scitabl122629Malcom Xi Bin HalfanBelum ada peringkat
- NewDokumen7 halamanNewmohibharBelum ada peringkat
- The Big, Bad Book of Botany: The World's Most Fascinating FloraDari EverandThe Big, Bad Book of Botany: The World's Most Fascinating FloraPenilaian: 3 dari 5 bintang3/5 (10)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingDari EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingPenilaian: 5 dari 5 bintang5/5 (4)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingDari EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingPenilaian: 3.5 dari 5 bintang3.5/5 (31)
- Last Child in the Woods: Saving Our Children From Nature-Deficit DisorderDari EverandLast Child in the Woods: Saving Our Children From Nature-Deficit DisorderPenilaian: 4 dari 5 bintang4/5 (283)