Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Pile Foundation SpecificationDokumen35 halamanPile Foundation SpecificationlearnafrenBelum ada peringkat
- Offshore PlatformsDokumen42 halamanOffshore PlatformsTosafScholarGroup100% (1)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- GE Design GuideDokumen53 halamanGE Design GuideGuido Kats100% (1)
- Sheet Metal Design-Handbook-Rev3 PDFDokumen12 halamanSheet Metal Design-Handbook-Rev3 PDFtnchsg100% (1)
- Sheet Metal Design-Handbook-Rev3 PDFDokumen12 halamanSheet Metal Design-Handbook-Rev3 PDFtnchsg100% (1)
- Surface Modeling Techniques for Complex ShapesDokumen21 halamanSurface Modeling Techniques for Complex ShapesRahul100% (1)
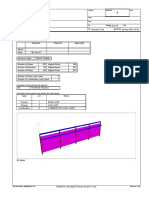
- Structure analysis report with node, element, load and material detailsDokumen8 halamanStructure analysis report with node, element, load and material detailsSiva JaseBelum ada peringkat
- PEX Installation Handbook 2006Dokumen17 halamanPEX Installation Handbook 2006obBelum ada peringkat
- Stainless SteelDokumen51 halamanStainless Steelcristian111111Belum ada peringkat
- Different Types of Plastics and Their Classification: Recycle. Polycarbonate (PC) Is Used in Baby Bottles, Compact DiscsDokumen2 halamanDifferent Types of Plastics and Their Classification: Recycle. Polycarbonate (PC) Is Used in Baby Bottles, Compact DiscsSiddharth GhorpadeBelum ada peringkat
- Drilled Cast-In-Place Pile Design Based On ACI 318-19: DH HK U U UDokumen1 halamanDrilled Cast-In-Place Pile Design Based On ACI 318-19: DH HK U U UtriBelum ada peringkat
- Snap Fit DesignDokumen0 halamanSnap Fit DesignDavid García SalvatierraBelum ada peringkat
- Support of Deep Excavation in Soft Clay A Case History StudyDokumen8 halamanSupport of Deep Excavation in Soft Clay A Case History StudyAlfredo A LopezBelum ada peringkat
- Spun Concrete Piles Product LeafletDokumen4 halamanSpun Concrete Piles Product LeafletDieka Meidilla AnanzaBelum ada peringkat
- Interview Quesyions On FEADokumen13 halamanInterview Quesyions On FEANathaji ShelkeBelum ada peringkat
- Element TypesDokumen1 halamanElement TypesNathaji ShelkeBelum ada peringkat
- MethodologyDokumen2 halamanMethodologyNathaji ShelkeBelum ada peringkat
- New Element TypesDokumen1 halamanNew Element TypesNathaji ShelkeBelum ada peringkat
- Developed Length: About Y Factor and K FactorDokumen2 halamanDeveloped Length: About Y Factor and K FactorNathaji ShelkeBelum ada peringkat
- Plates & Shells Theories: Kirchhfoff Reissner/MindlinDokumen32 halamanPlates & Shells Theories: Kirchhfoff Reissner/MindlinNathaji ShelkeBelum ada peringkat
- New Element TypesDokumen1 halamanNew Element TypesNathaji ShelkeBelum ada peringkat
- Nonlinear Finite Element Modeling and Simulation Week 1: Dhafer Marzougui Pradeep MohanDokumen61 halamanNonlinear Finite Element Modeling and Simulation Week 1: Dhafer Marzougui Pradeep MohanHumayun NawazBelum ada peringkat
- Advanced Finite Element Beams Theory & CalculationsDokumen20 halamanAdvanced Finite Element Beams Theory & CalculationsNathaji ShelkeBelum ada peringkat
- Drawing ItemsDokumen6 halamanDrawing ItemsNathaji ShelkeBelum ada peringkat
- Thermal AnalysisDokumen11 halamanThermal AnalysisNathaji ShelkeBelum ada peringkat
- 195she PDFDokumen6 halaman195she PDFNathaji ShelkeBelum ada peringkat
- ModalDokumen6 halamanModalNathaji ShelkeBelum ada peringkat
- Assembly Techniques For PlasticsDokumen21 halamanAssembly Techniques For PlasticsNathaji Shelke100% (1)
- New Element TypesDokumen1 halamanNew Element TypesNathaji ShelkeBelum ada peringkat
- New Element TypesDokumen1 halamanNew Element TypesNathaji ShelkeBelum ada peringkat
- G.E. Thermoplastics Injection Moulding Processing GuideDokumen52 halamanG.E. Thermoplastics Injection Moulding Processing Guidescribddotcomaccount50% (2)
- Thermal Stress Analysis Techniques in ANSYSDokumen11 halamanThermal Stress Analysis Techniques in ANSYSFahad KhanBelum ada peringkat
- PlasticDokumen4 halamanPlasticNathaji ShelkeBelum ada peringkat
- Fluent Evaporation & CondensationDokumen27 halamanFluent Evaporation & CondensationTooba GhouriBelum ada peringkat
- Offshore Petroleum Production SystemsDokumen48 halamanOffshore Petroleum Production SystemsAmin ElfatihBelum ada peringkat
- Fosroc Renderoc Laxtra: Constructive SolutionsDokumen2 halamanFosroc Renderoc Laxtra: Constructive SolutionsVincent JavateBelum ada peringkat
- DTP STore Shed ShevgaonDokumen16 halamanDTP STore Shed Shevgaonrahul pardeshiBelum ada peringkat
- Double Integration Beam Deflection MethodDokumen22 halamanDouble Integration Beam Deflection Methodacurvz2005Belum ada peringkat
- Acid Curing Epoxy Pipeline DatasheetDokumen18 halamanAcid Curing Epoxy Pipeline DatasheetErbol KarzhaubaiulyBelum ada peringkat
- Materials Engineering: Mechanical PropertiesDokumen26 halamanMaterials Engineering: Mechanical PropertiesJeromeDelCastilloBelum ada peringkat
- 2020-04-15 - JMB - WWTP - Instrument ListDokumen1 halaman2020-04-15 - JMB - WWTP - Instrument ListAzisBelum ada peringkat
- Arcelormittal If 180 High Strength If Steel, Cold Rolled: Metal, Ferrous Metal, Alloy SteelDokumen2 halamanArcelormittal If 180 High Strength If Steel, Cold Rolled: Metal, Ferrous Metal, Alloy SteelvictorBelum ada peringkat
- Bending Of Beam Lab Report AnalysisDokumen10 halamanBending Of Beam Lab Report AnalysisEdoardo PeciBelum ada peringkat
- HSD Plate 4Dokumen6 halamanHSD Plate 4Claudel Bea OpaonBelum ada peringkat
- Gantrex mk60 Pad Data Sheet - Metric PDFDokumen2 halamanGantrex mk60 Pad Data Sheet - Metric PDFNilma Rosa Barsallo PachecoBelum ada peringkat
- Primary Sedimentation TankDokumen3 halamanPrimary Sedimentation TankTalimBelum ada peringkat
- ETABS 17.0.1 Concrete Frame Beam DesignDokumen2 halamanETABS 17.0.1 Concrete Frame Beam DesignMackBelum ada peringkat
- Foamix: F A L W CDokumen2 halamanFoamix: F A L W CEng-Medrar AlkateryBelum ada peringkat
- Tesis Puentes ColoradoDokumen289 halamanTesis Puentes ColoradoWerner Lucin Marcelino Pinchi ReynagaBelum ada peringkat
- Esr 2653Dokumen9 halamanEsr 2653Uğur ErdoğanBelum ada peringkat
- Chapter 4 LECTURE 1Dokumen40 halamanChapter 4 LECTURE 1Mohammad BarmawiBelum ada peringkat
- CEMCO FAS Track UL Fire Rated Assemblies 584297Dokumen71 halamanCEMCO FAS Track UL Fire Rated Assemblies 584297AhmedBelum ada peringkat
- Tubewells and DesignDokumen60 halamanTubewells and Designاشتیاق حسینBelum ada peringkat
- PDFDokumen4 halamanPDFMuhammad Imdad HussainBelum ada peringkat
- Access Chambers Product Size GuideDokumen1 halamanAccess Chambers Product Size GuideJJBelum ada peringkat
- Tie BeamDokumen1 halamanTie BeamCarlo M. FloresBelum ada peringkat