Anda mungkin juga menyukai
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Dari EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Belum ada peringkat
- Line Follower ReportDokumen23 halamanLine Follower Reportatul mishra88% (8)
- Line Robot FollowerDokumen23 halamanLine Robot Followeratul mishra100% (1)
- Troubleshooting Electronic Components With The PET BloodhoundDari EverandTroubleshooting Electronic Components With The PET BloodhoundBelum ada peringkat
- Automatic Staircase LightningDokumen23 halamanAutomatic Staircase LightningAniket Pawar100% (3)
- Advanced Line FollowerDokumen15 halamanAdvanced Line FollowerMohtasim NakibBelum ada peringkat
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Dari EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Penilaian: 2.5 dari 5 bintang2.5/5 (3)
- Robot Project JaseungDokumen7 halamanRobot Project JaseungGiri MuruganBelum ada peringkat
- Stem: Science, Technology, Engineering and Maths Principles V11Dari EverandStem: Science, Technology, Engineering and Maths Principles V11Belum ada peringkat
- Automatic Street LightDokumen13 halamanAutomatic Street LightReymark CrisostomoBelum ada peringkat
- Mahendra Engineering College (Autonomous) : Yaswanth Kumar.SDokumen10 halamanMahendra Engineering College (Autonomous) : Yaswanth Kumar.SYãshBelum ada peringkat
- Obstacle Sensed Switching in Industrial ApplicationsDokumen68 halamanObstacle Sensed Switching in Industrial ApplicationsAbhijit PattnaikBelum ada peringkat
- Overview of IR SensorDokumen8 halamanOverview of IR SensorMahesh KallaBelum ada peringkat
- Line FollowerDokumen13 halamanLine FollowerFarah AzamBelum ada peringkat
- Proximity Sensor TutorialDokumen13 halamanProximity Sensor TutorialShubham AgrawalBelum ada peringkat
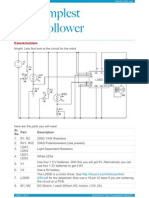
- The Simplest Line Follower: ConstructionDokumen5 halamanThe Simplest Line Follower: Constructionapi-115728880Belum ada peringkat
- Logic Probe MK IIBDokumen8 halamanLogic Probe MK IIBJose GarciaBelum ada peringkat
- PhototransistorDokumen13 halamanPhototransistorYean CardozoBelum ada peringkat
- Line Follower RobotDokumen22 halamanLine Follower Robotkawish4uBelum ada peringkat
- Obstacle Avoider Using Atmega 8, IR Sensor, Embedded C Programming On AVR TutorialDokumen7 halamanObstacle Avoider Using Atmega 8, IR Sensor, Embedded C Programming On AVR TutorialMUDAM ALEKYABelum ada peringkat
- Line Follower Robot Using LabVIEWDokumen6 halamanLine Follower Robot Using LabVIEWTrần Huy Vinh QuangBelum ada peringkat
- Induction Motor Vibration DetectionDokumen5 halamanInduction Motor Vibration Detectionsmartxdigital marketBelum ada peringkat
- About Optoisolator IC and The Right Way To Test It: ComputerDokumen14 halamanAbout Optoisolator IC and The Right Way To Test It: ComputerJamal JardelBelum ada peringkat
- Chapter TwoDokumen39 halamanChapter TwodanielBelum ada peringkat
- Working Principle: 1) System CheckDokumen8 halamanWorking Principle: 1) System CheckHans IngoleBelum ada peringkat
- Railway Gate Control...............Dokumen52 halamanRailway Gate Control...............sknagarBelum ada peringkat
- Automatic Street Light Circuit Using LDRDokumen5 halamanAutomatic Street Light Circuit Using LDRsmartxdigital marketBelum ada peringkat
- Touch With Operate Relay KitDokumen3 halamanTouch With Operate Relay KitVijay KrishnaBelum ada peringkat
- Experiment 11Dokumen8 halamanExperiment 11Mihai BogdanBelum ada peringkat
- Touch Switch With Lamp KitDokumen4 halamanTouch Switch With Lamp KitVijay KrishnaBelum ada peringkat
- Color SensorDokumen14 halamanColor SensorKarl Reinier Villadiego EraBelum ada peringkat
- Miniprojects 2017Dokumen6 halamanMiniprojects 2017Dustin GrahamBelum ada peringkat
- Project Report: Line Following RobotDokumen12 halamanProject Report: Line Following RobotAhsan MuradBelum ada peringkat
- Bidirectional Visitor Counter Using 8051 MicrocontrollerDokumen22 halamanBidirectional Visitor Counter Using 8051 MicrocontrollerKaos Polos Nakira50% (2)
- Fiber Optic Telemetry System Using Ne555Dokumen10 halamanFiber Optic Telemetry System Using Ne555Rajesh VeerabadranBelum ada peringkat
- Building Sensors and Motors For The Handy Board: Connector Wiring TechniqueDokumen8 halamanBuilding Sensors and Motors For The Handy Board: Connector Wiring Techniquepiyushji125Belum ada peringkat
- Automatic Room Control Lighthalf DoneDokumen9 halamanAutomatic Room Control Lighthalf DoneRudransh RaghorteBelum ada peringkat
- Ir SensorDokumen6 halamanIr SensorCharming RizwanBelum ada peringkat
- Line FollowerDokumen6 halamanLine FollowerD Sreeram BhargavBelum ada peringkat
- Automatic Over Temperature Detection and AlertDokumen5 halamanAutomatic Over Temperature Detection and Alertsmartxdigital marketBelum ada peringkat
- Report of IR Sensor ProjectDokumen13 halamanReport of IR Sensor ProjectHammad Umer0% (2)
- Non Programmable Line Follower RobotDokumen27 halamanNon Programmable Line Follower RobotAsish Kumar Sharma100% (1)
- Electronics ProjectDokumen9 halamanElectronics Projectlevi'cBelum ada peringkat
- Automatic Room Light ControllerDokumen35 halamanAutomatic Room Light ControllerUjjwal Deb BarmanBelum ada peringkat
- LFR Tutorial CompleteDokumen22 halamanLFR Tutorial CompleteTraic Club0% (1)
- Line Following Robot With Color Detection PDFDokumen10 halamanLine Following Robot With Color Detection PDFpaishkepeng100% (1)
- Street Light That Glows On Detecting Vehicle Movement Using Ir SensorDokumen15 halamanStreet Light That Glows On Detecting Vehicle Movement Using Ir SensorKaos Polos Nakira75% (4)
- Project Report (ADS)Dokumen6 halamanProject Report (ADS)Divye KotwalBelum ada peringkat
- Project On IR Remote Controlled Home AutomationDokumen6 halamanProject On IR Remote Controlled Home AutomationDivye KotwalBelum ada peringkat
- Infrared Emitter From CMOS 555 Robot RoomDokumen6 halamanInfrared Emitter From CMOS 555 Robot RoomnkimlevnBelum ada peringkat
- Line Maze Solving RobotDokumen10 halamanLine Maze Solving Robottcteh86Belum ada peringkat
- 3 VDC To 12 V DC ConverterDokumen24 halaman3 VDC To 12 V DC ConverterSanjay Kumar SinghBelum ada peringkat
- Control Relay Using IR SensorDokumen5 halamanControl Relay Using IR Sensorsmartxdigital marketBelum ada peringkat
- The LM324 Quad Op-Amp Line Follower Robot With Pulse Width ModulationDokumen15 halamanThe LM324 Quad Op-Amp Line Follower Robot With Pulse Width ModulationMeyersson BeltranBelum ada peringkat
- Project Report: Digital Logic DesignsDokumen17 halamanProject Report: Digital Logic DesignsSiddique FarooqBelum ada peringkat
- Line Follower RobotDokumen29 halamanLine Follower RobotSebastin AshokBelum ada peringkat
- 2-Way Sound Sensitive Line FollowerDokumen13 halaman2-Way Sound Sensitive Line FollowerAbhishek DasBelum ada peringkat
- Control Lamp Using IR SensorDokumen5 halamanControl Lamp Using IR Sensorsmartxdigital marketBelum ada peringkat
- Messageclass ZnpdiDokumen1 halamanMessageclass ZnpdiSameer SalamBelum ada peringkat
- Messageclass-Z Sa MDDokumen2 halamanMessageclass-Z Sa MDSameer SalamBelum ada peringkat
- Layout Tela Exercício 6-37Dokumen4 halamanLayout Tela Exercício 6-37murilloarantesBelum ada peringkat
- Messageclass zctb01Dokumen1 halamanMessageclass zctb01Sameer SalamBelum ada peringkat
- Messageclass ZcproDokumen1 halamanMessageclass ZcproSameer SalamBelum ada peringkat
- Messageclass zcr555Dokumen1 halamanMessageclass zcr555Sameer SalamBelum ada peringkat
- Messageclass-Zzdea MSGDokumen1 halamanMessageclass-Zzdea MSGSameer SalamBelum ada peringkat
- Layout Tela Exercício 6-37Dokumen4 halamanLayout Tela Exercício 6-37murilloarantesBelum ada peringkat
- All About SAP - How To Change Font in SAPDokumen3 halamanAll About SAP - How To Change Font in SAPSameer SalamBelum ada peringkat
- ABAP For ALL ENTRIES - Why You Need To Include KEY Fields - ABAP HelpDokumen4 halamanABAP For ALL ENTRIES - Why You Need To Include KEY Fields - ABAP HelpSameer SalamBelum ada peringkat
- Amul Kool Cafe Coffee Can 250ml: Lay's Spanish Tomato Tango Potato ChipsDokumen1 halamanAmul Kool Cafe Coffee Can 250ml: Lay's Spanish Tomato Tango Potato ChipsSameer SalamBelum ada peringkat
- Back To Selection Screen After Error - SCNDokumen4 halamanBack To Selection Screen After Error - SCNSameer SalamBelum ada peringkat
- Honesty & Integrity - Enriching Partnerships: About UsDokumen4 halamanHonesty & Integrity - Enriching Partnerships: About Usgulatiankur2010Belum ada peringkat
- ABAP For ALL ENTRIES - Why You Need To Include KEY Fields - ABAP HelpDokumen4 halamanABAP For ALL ENTRIES - Why You Need To Include KEY Fields - ABAP HelpSameer SalamBelum ada peringkat
- Annexure RDD0069 v1.0Dokumen5 halamanAnnexure RDD0069 v1.0Sameer SalamBelum ada peringkat
- All About Smart FormsDokumen18 halamanAll About Smart FormsSameer SalamBelum ada peringkat
- SD ProcessDokumen12 halamanSD ProcessSameer SalamBelum ada peringkat
- Material Master Data: Purchasing Data Materials Planning DataDokumen17 halamanMaterial Master Data: Purchasing Data Materials Planning DataSameer SalamBelum ada peringkat
- Functional Specification Report: Report/Form ID: 70-DI Report/Form Name: Inventory Detail by LocationDokumen10 halamanFunctional Specification Report: Report/Form ID: 70-DI Report/Form Name: Inventory Detail by LocationSameer SalamBelum ada peringkat
- UK Trip GuidelinesDokumen23 halamanUK Trip GuidelinesSameer SalamBelum ada peringkat
- Sap Erp Implementation CycleDokumen14 halamanSap Erp Implementation CycleSameer SalamBelum ada peringkat
- Annexure RDD0068 V1.0Dokumen4 halamanAnnexure RDD0068 V1.0Sameer SalamBelum ada peringkat
- CP RPT FDD RDD0069Dokumen9 halamanCP RPT FDD RDD0069Sameer SalamBelum ada peringkat
- Annexure RDD0075 V1.0Dokumen4 halamanAnnexure RDD0075 V1.0Sudheer Kumar ChunduruBelum ada peringkat
- Templet For Report1Dokumen13 halamanTemplet For Report1Sameer SalamBelum ada peringkat
- New Text DocumentDokumen2 halamanNew Text DocumentSameer SalamBelum ada peringkat
- F Report1 Aged Blocked InvoicesDokumen5 halamanF Report1 Aged Blocked InvoicesSameer SalamBelum ada peringkat
- Annexure RDD0068 V1.0Dokumen4 halamanAnnexure RDD0068 V1.0Sameer SalamBelum ada peringkat
- Alv OopsDokumen8 halamanAlv OopsSameer SalamBelum ada peringkat
- New Microsoft Word 97 - 2003 DocumentDokumen1 halamanNew Microsoft Word 97 - 2003 DocumentSameer SalamBelum ada peringkat
- Automatic Bike Stand ReportDokumen50 halamanAutomatic Bike Stand ReportSai Vamshi PranayBelum ada peringkat
- Assignment No1 Task .No 1Dokumen24 halamanAssignment No1 Task .No 1Faria AmirBelum ada peringkat
- Report MCS PDFDokumen81 halamanReport MCS PDFEjaz ul Haq kakarBelum ada peringkat
- Instruction Sheet 735 3101: Industrial Frequency Converter 400 V (735 3101)Dokumen4 halamanInstruction Sheet 735 3101: Industrial Frequency Converter 400 V (735 3101)John Philip Rosario SabayleBelum ada peringkat
- Nts NTDCL TestDokumen144 halamanNts NTDCL TestAmmad EjazBelum ada peringkat
- To Study Various Factors, On Which Resistance of Internal A Cell Depends.Dokumen19 halamanTo Study Various Factors, On Which Resistance of Internal A Cell Depends.a8avvtt6Belum ada peringkat
- Course Engine Diesel Series 40e Detroit Electronic System FeaturesDokumen160 halamanCourse Engine Diesel Series 40e Detroit Electronic System FeaturesTriyono100% (1)
- Vacon NXL Multicontrol Application Manual DPD01447A UKDokumen63 halamanVacon NXL Multicontrol Application Manual DPD01447A UKAbijithBelum ada peringkat
- Traffic Light ComponentsDokumen14 halamanTraffic Light Componentsshobanraj1995Belum ada peringkat
- Data Sheet For Precision Potentiometer: Multiturn Wirewound Potentiometer Series AL17/19Dokumen6 halamanData Sheet For Precision Potentiometer: Multiturn Wirewound Potentiometer Series AL17/19Danna PerezBelum ada peringkat
- DET-2 Service ManualDokumen105 halamanDET-2 Service Manualkriotron50% (2)
- 2018 - Development of A Low-Cost Single-Axis Shake Table Based On ArduinoDokumen20 halaman2018 - Development of A Low-Cost Single-Axis Shake Table Based On ArduinoSachin ShindeBelum ada peringkat
- 06f Engine CFM LEAP NEO Control and Indication Rev 02Dokumen35 halaman06f Engine CFM LEAP NEO Control and Indication Rev 02Ricardo Rubio92% (12)
- JC6000 Brochure Oct08 (En)Dokumen16 halamanJC6000 Brochure Oct08 (En)djoko123Belum ada peringkat
- Jc6000 Multi Axis Joystick ControllerDokumen15 halamanJc6000 Multi Axis Joystick ControllerevgeniBelum ada peringkat
- Tinkercad Simulation of Arduino Circuit With 3 InputsDokumen10 halamanTinkercad Simulation of Arduino Circuit With 3 InputsleoBelum ada peringkat
- Ee-316 - Circuit Theory LabDokumen47 halamanEe-316 - Circuit Theory LabsureshhasiniBelum ada peringkat
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFDokumen183 halamanControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFShakil Ahmed100% (1)
- Physics Project: Satya Prakash Public SchoolDokumen15 halamanPhysics Project: Satya Prakash Public SchoolsanjeeviBelum ada peringkat
- Vacon NXL ManualDokumen62 halamanVacon NXL ManualKarthik SriramakavachamBelum ada peringkat
- Digital Clock Project Report: Department of Electrical Engineering Indian Institute of Technology HyderabadDokumen10 halamanDigital Clock Project Report: Department of Electrical Engineering Indian Institute of Technology Hyderabad2015mdaamir2015Belum ada peringkat
- Chapter 7 Sensors and TransducersDokumen22 halamanChapter 7 Sensors and TransducersAbu ZinnirahBelum ada peringkat
- EV100LX Instructions With EV200 SupplementDokumen81 halamanEV100LX Instructions With EV200 SupplementAlexandre BatistaBelum ada peringkat
- DC Motor LabviewDokumen23 halamanDC Motor Labviewsara_ogl7Belum ada peringkat
- Manual 1266aDokumen60 halamanManual 1266aSergio RecabarrenBelum ada peringkat
- Sevcon SC2000 Manual - With Calibrator Section PDFDokumen58 halamanSevcon SC2000 Manual - With Calibrator Section PDFAdrian FerreyraBelum ada peringkat
- EC1 Lab Exp3 PDFDokumen2 halamanEC1 Lab Exp3 PDFRitu RoyBelum ada peringkat
- Installation and Maintenance: Oe Uf V S UfDokumen16 halamanInstallation and Maintenance: Oe Uf V S Uf3efooBelum ada peringkat
- 1220e Manual enDokumen72 halaman1220e Manual enAlexandra GarciaBelum ada peringkat
- Lab 3. Transistor and Logic GatesDokumen9 halamanLab 3. Transistor and Logic GatesPatrick YangniBelum ada peringkat