Anda mungkin juga menyukai
- BAB19 - Engineering ApplicationsDokumen32 halamanBAB19 - Engineering ApplicationscakMAD69Belum ada peringkat
- BAB18 - The Additional MathDokumen8 halamanBAB18 - The Additional MathcakMAD69Belum ada peringkat
- BAB14 - The Sinks LibraryDokumen16 halamanBAB14 - The Sinks LibrarycakMAD69Belum ada peringkat
- BAB13 - The Signal Routing LibraryDokumen19 halamanBAB13 - The Signal Routing LibrarycakMAD69Belum ada peringkat
- BAB16 - The User-Defined Funtions LibraryDokumen14 halamanBAB16 - The User-Defined Funtions LibrarycakMAD69Belum ada peringkat
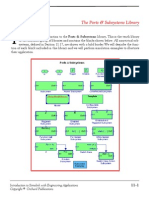
- BAB11 - The Ports & Subsystems LibraryDokumen51 halamanBAB11 - The Ports & Subsystems LibrarycakMAD69Belum ada peringkat
- BAB17 - The Additional Discrete LibraryDokumen24 halamanBAB17 - The Additional Discrete LibrarycakMAD69Belum ada peringkat
- BAB15 - The Sources LibraryDokumen29 halamanBAB15 - The Sources LibrarycakMAD69Belum ada peringkat
- BAB12 - The Signal Attributes LibraryDokumen18 halamanBAB12 - The Signal Attributes LibrarycakMAD69Belum ada peringkat
- BAB09 - The Model Verification LibraryDokumen20 halamanBAB09 - The Model Verification LibrarycakMAD69Belum ada peringkat
- BAB07 - The Look Tables LibraryDokumen25 halamanBAB07 - The Look Tables LibrarycakMAD69Belum ada peringkat
- BAB08 - The Math Operations LibraryDokumen37 halamanBAB08 - The Math Operations LibrarycakMAD69100% (1)
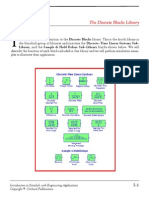
- BAB05 - The Discrete Blocks LibraryDokumen33 halamanBAB05 - The Discrete Blocks LibrarycakMAD69Belum ada peringkat
- BAB06 - The Logic and Bit Operations LibraryDokumen37 halamanBAB06 - The Logic and Bit Operations LibrarycakMAD69Belum ada peringkat
- BAB03 - The Cont Blocks LibDokumen20 halamanBAB03 - The Cont Blocks LibcakMAD69Belum ada peringkat
- BAB04 - The Discont Blocks LibraryDokumen22 halamanBAB04 - The Discont Blocks LibrarycakMAD69Belum ada peringkat
- BAB02 - The Commonly Used Blocks LibDokumen46 halamanBAB02 - The Commonly Used Blocks LibcakMAD69Belum ada peringkat
- BAB01 - Introduction To SimulinkDokumen40 halamanBAB01 - Introduction To SimulinkcakMAD69100% (2)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Exception HandlingDokumen10 halamanException HandlingSushil KumarBelum ada peringkat
- DoseLink Space PCD-03Dokumen31 halamanDoseLink Space PCD-03faisalBelum ada peringkat
- AJP Microproject Report on Currency Converter using SwingDokumen11 halamanAJP Microproject Report on Currency Converter using SwingRitesh Sulakhe100% (1)
- Assignment 1Dokumen5 halamanAssignment 1manoj manuBelum ada peringkat
- CMAQv5 0Dokumen127 halamanCMAQv5 0juan_mondaBelum ada peringkat
- Reengineering Technologies: IEEE Software January 2012Dokumen6 halamanReengineering Technologies: IEEE Software January 2012Genaro OchoaBelum ada peringkat
- AWS Certified Developer Associate Practice Test #6 ResultsDokumen67 halamanAWS Certified Developer Associate Practice Test #6 ResultsShadi ArnaoutBelum ada peringkat
- OSP ManualDokumen417 halamanOSP ManualTecno ASBelum ada peringkat
- D53942GC10 sg2Dokumen390 halamanD53942GC10 sg2feders156Belum ada peringkat
- Master Marksheet TemplateDokumen15 halamanMaster Marksheet TemplateOoi Leng KaiBelum ada peringkat
- IT2-FLSs ManualDokumen4 halamanIT2-FLSs ManualahmedBelum ada peringkat
- Document Title: Specification of MCU DriverDokumen47 halamanDocument Title: Specification of MCU DriverRambo HuangBelum ada peringkat
- SAP Security Administration Using ST01Dokumen11 halamanSAP Security Administration Using ST01Sindhuri KilaruBelum ada peringkat
- soapUI testing tool featuresDokumen2 halamansoapUI testing tool featuresswaroopmehta1982Belum ada peringkat
- Create A Duplicate ORACLE Database On WindowsDokumen12 halamanCreate A Duplicate ORACLE Database On WindowsNikos PlevrisBelum ada peringkat
- 2023-03-03 - 10-45-47 Plugin LogDokumen2 halaman2023-03-03 - 10-45-47 Plugin LogDiego HernándezBelum ada peringkat
- Sunit Explained: Stéphane DucasseDokumen8 halamanSunit Explained: Stéphane DucasseGratian StevieBelum ada peringkat
- EpicorServiceConnect ReleaseNotes 905700Dokumen9 halamanEpicorServiceConnect ReleaseNotes 905700Annabella1234Belum ada peringkat
- Screenshots: 1. Search EBIR Forms in Your BrowserDokumen22 halamanScreenshots: 1. Search EBIR Forms in Your BrowserJohn Paul AloyBelum ada peringkat
- 133 Core Java Interview Questions Answers From Last 5 Years - The MEGA ListDokumen20 halaman133 Core Java Interview Questions Answers From Last 5 Years - The MEGA ListRaJu SinGhBelum ada peringkat
- D5.4 DICE Testing Tool - Initial VersionDokumen35 halamanD5.4 DICE Testing Tool - Initial VersiongkoutBelum ada peringkat
- 4 Python Functions, Modules and PackagesDokumen13 halaman4 Python Functions, Modules and PackagesSpBelum ada peringkat
- CDS ViewDokumen103 halamanCDS Viewthanhtbt100% (4)
- Xtext User GuideDokumen65 halamanXtext User GuideRuthless ManBelum ada peringkat
- Device I/O Tests FundamentalsDokumen3 halamanDevice I/O Tests FundamentalsbioBelum ada peringkat
- Manual For Package Pgfplotstable: Dr. Christian FeuersängerDokumen72 halamanManual For Package Pgfplotstable: Dr. Christian FeuersängerAngelika ErhardtBelum ada peringkat
- Big Data 3Dokumen16 halamanBig Data 3Royal HunterBelum ada peringkat
- Learn Oozie Workflow and Coordinator JobsDokumen38 halamanLearn Oozie Workflow and Coordinator JobsNeelesh SasidharanBelum ada peringkat
- Michael Pagano ResumeDokumen3 halamanMichael Pagano ResumeAnirudh PandeyBelum ada peringkat
- App ManagementDokumen215 halamanApp ManagementSambit PadhyBelum ada peringkat