Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Maclaurin and Taylors SeriesDokumen2 halamanMaclaurin and Taylors SeriesdssrwrtgwtgBelum ada peringkat
- L13 Three Phase Fully Controlled Bridge ConverterDokumen29 halamanL13 Three Phase Fully Controlled Bridge Converterapi-19951707Belum ada peringkat
- Seven Brief Lessons On Physics (PDFDrive)Dokumen128 halamanSeven Brief Lessons On Physics (PDFDrive)danielsandiano100% (5)
- 12 Things You Should Know About Scalar WeaponsDokumen17 halaman12 Things You Should Know About Scalar Weaponsacts2and38100% (2)
- Secondary Beam ExampleDokumen5 halamanSecondary Beam ExampleAboalmaail AlaminBelum ada peringkat
- Introduction To Antenna Types and Their Applications: Abstract This Paper Introduces Antenna Theory and DiscussesDokumen7 halamanIntroduction To Antenna Types and Their Applications: Abstract This Paper Introduces Antenna Theory and DiscussesNag ChallaBelum ada peringkat
- Frontiers in Relativistic Celestial MechDokumen372 halamanFrontiers in Relativistic Celestial MechCarl MarksBelum ada peringkat
- Strength of Material 2Dokumen12 halamanStrength of Material 2mjdalenezi100% (1)
- Crystal Lattice Vibrations: Phonons: Introduction To Solid State PhysicsDokumen25 halamanCrystal Lattice Vibrations: Phonons: Introduction To Solid State PhysicsJack CaoBelum ada peringkat
- Reactive Power CompensationDokumen12 halamanReactive Power CompensationSyed Muhammad Munavvar Hussain100% (5)
- ABB Protection Application HandbookDokumen356 halamanABB Protection Application HandbookSyed Muhammad Munavvar HussainBelum ada peringkat
- Distance Protection RelayDokumen27 halamanDistance Protection RelaycallkalaiBelum ada peringkat
- Chapter 1Dokumen2 halamanChapter 1Syed Muhammad Munavvar HussainBelum ada peringkat
- Daas Capital (Urdu) by Karl MarxDokumen584 halamanDaas Capital (Urdu) by Karl MarxTahir QayyumBelum ada peringkat
- S1Dokumen8 halamanS1Ratheesh KumarBelum ada peringkat
- S1Dokumen8 halamanS1Ratheesh KumarBelum ada peringkat
- Power Semiconductor Device NptelDokumen14 halamanPower Semiconductor Device NptelMohammad Aminul IslamBelum ada peringkat
- Lesson 6 Metal Oxide Semiconductor Field Effect Transistor (MOSFET)Dokumen30 halamanLesson 6 Metal Oxide Semiconductor Field Effect Transistor (MOSFET)Chacko MathewBelum ada peringkat
- Distance Relay FundamentalsDokumen20 halamanDistance Relay FundamentalsSyed Muhammad Munavvar HussainBelum ada peringkat
- L14 Three Phase Half Controlled ConverterDokumen18 halamanL14 Three Phase Half Controlled Converterapi-19951707Belum ada peringkat
- CV Electrical EngineerDokumen1 halamanCV Electrical EngineerSyed Muhammad Munavvar HussainBelum ada peringkat
- Tareekh e Islam - Moulana Ali Naqi Naqvi Urf Naqqan SahabDokumen530 halamanTareekh e Islam - Moulana Ali Naqi Naqvi Urf Naqqan SahabSyed Muhammad Munavvar Hussain100% (12)
- Lesson 3 Power Bipolar Junction Transistor (BJT)Dokumen45 halamanLesson 3 Power Bipolar Junction Transistor (BJT)Chacko MathewBelum ada peringkat
- Lesson 4 Thyristors and TriacsDokumen39 halamanLesson 4 Thyristors and TriacsChacko Mathew100% (1)
- Lesson 2 Constructional Features, Operating Principle, Characteristics and Specification of Power Semiconductor DiodeDokumen31 halamanLesson 2 Constructional Features, Operating Principle, Characteristics and Specification of Power Semiconductor DiodeChacko MathewBelum ada peringkat
- Power Factor Improvement, Harmonics Reduction, FiltersDokumen18 halamanPower Factor Improvement, Harmonics Reduction, FiltersSyed Muhammad Munavvar HussainBelum ada peringkat
- Three-Phase AC RegulatorsDokumen12 halamanThree-Phase AC RegulatorsSyed Muhammad Munavvar HussainBelum ada peringkat
- L12 Single Phase Uncontrolled RectifierDokumen22 halamanL12 Single Phase Uncontrolled Rectifierapi-19951707100% (1)
- L11 Single Phase Half Controlled Bridge ConverterDokumen19 halamanL11 Single Phase Half Controlled Bridge Converterapi-19951707Belum ada peringkat
- Environment and ConservationDokumen6 halamanEnvironment and ConservationSyed Muhammad Munavvar HussainBelum ada peringkat
- Stylish CV Electrical EngineerDokumen1 halamanStylish CV Electrical EngineerSyed Muhammad Munavvar HussainBelum ada peringkat
- L10 Single Phase Fully Controlled RectifierDokumen26 halamanL10 Single Phase Fully Controlled Rectifierapi-1995170750% (2)
- Types of Basic DC-DC ConvertersDokumen11 halamanTypes of Basic DC-DC ConvertersSyed Muhammad Munavvar Hussain50% (2)
- CV With Good Short Profile and Simple StyleDokumen1 halamanCV With Good Short Profile and Simple StyleSyed Muhammad Munavvar HussainBelum ada peringkat
- Engr. Munavvar CVDokumen1 halamanEngr. Munavvar CVSyed Muhammad Munavvar HussainBelum ada peringkat
- Engr. Munavvar's CV NewDokumen1 halamanEngr. Munavvar's CV NewSyed Muhammad Munavvar HussainBelum ada peringkat
- Stylish CV Electrical EngineerDokumen1 halamanStylish CV Electrical EngineerSyed Muhammad Munavvar HussainBelum ada peringkat
- Stylish CV Electrical EngineerDokumen1 halamanStylish CV Electrical EngineerSyed Muhammad Munavvar HussainBelum ada peringkat
- Cálculo Sin ModificacionesDokumen26 halamanCálculo Sin ModificacionesAngel MingaBelum ada peringkat
- Ekaterina Izgorodina Ionic LiquidsDokumen6 halamanEkaterina Izgorodina Ionic LiquidsizabelaBelum ada peringkat
- TurbinesDokumen3 halamanTurbinescnjoyus100% (1)
- Assignment 1 - MagnetismDokumen3 halamanAssignment 1 - MagnetismAnanya SinghBelum ada peringkat
- Modeling and Altitude Control of Quad-Rotor UAVDokumen6 halamanModeling and Altitude Control of Quad-Rotor UAVescanusBelum ada peringkat
- Chi, M. T., Slotta, J. D., & de Leeuw, N. (1994) - From Things To Processes: A Theory of Conceptual Change For Learning Science Concepts. Learning and Instruction, 4 (1), 27-43.Dokumen17 halamanChi, M. T., Slotta, J. D., & de Leeuw, N. (1994) - From Things To Processes: A Theory of Conceptual Change For Learning Science Concepts. Learning and Instruction, 4 (1), 27-43.Lina Sierra100% (1)
- Unit 4 Self Generating Sensors PDFDokumen57 halamanUnit 4 Self Generating Sensors PDFHingula100% (1)
- POGIL Molecular GeometryDokumen3 halamanPOGIL Molecular Geometryliza120750% (2)
- 27 Jan 2024 Shift 1 Memory BasedDokumen29 halaman27 Jan 2024 Shift 1 Memory BasedHitarth JadiwalBelum ada peringkat
- Three Phase Transformer TrainerDokumen20 halamanThree Phase Transformer TrainerHaroon AsadBelum ada peringkat
- Chem Form-6-Sem-1-01 PDFDokumen44 halamanChem Form-6-Sem-1-01 PDFXuerong ChinBelum ada peringkat
- BTech CSEDokumen122 halamanBTech CSEJohn HarrisonBelum ada peringkat
- Enthalpy of ProtonationDokumen9 halamanEnthalpy of ProtonationMalik Alnabhani0% (1)
- Rigid Pavement Design: 15.1.1 Modulus of Sub-Grade ReactionDokumen11 halamanRigid Pavement Design: 15.1.1 Modulus of Sub-Grade ReactionVikash SinghBelum ada peringkat
- Cambridge International Examinations: Physics 0625/41 May/June 2017Dokumen11 halamanCambridge International Examinations: Physics 0625/41 May/June 2017priyaBelum ada peringkat
- Physical Science: Quarter 1 - Module 1 Week 1: Formation of Elements Week 2: Polarity of MoleculesDokumen19 halamanPhysical Science: Quarter 1 - Module 1 Week 1: Formation of Elements Week 2: Polarity of MoleculesMarie Grace Eguac Taghap100% (1)
- Bond Under Cyclic LoadDokumen5 halamanBond Under Cyclic LoadjeffBelum ada peringkat
- Notas Capitulo 9 de Jackson PDFDokumen64 halamanNotas Capitulo 9 de Jackson PDFAG OctavioBelum ada peringkat
- Absorption Coefficient - PVEducationDokumen3 halamanAbsorption Coefficient - PVEducationRiazAhmadBelum ada peringkat
- United States Patent (19) : SSNSN SnssnsDokumen6 halamanUnited States Patent (19) : SSNSN SnssnsMihai RobertBelum ada peringkat
- Electronic Configuration: By: Cyra Eunicer. TanaelDokumen17 halamanElectronic Configuration: By: Cyra Eunicer. TanaelDegala, Jan Marlou V.Belum ada peringkat
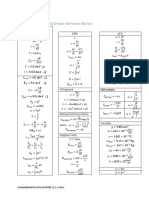
- FormulaSheet For EM and SHM v1.1.1Dokumen1 halamanFormulaSheet For EM and SHM v1.1.1陳輝王Belum ada peringkat