Anda mungkin juga menyukai
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDari EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsBelum ada peringkat
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDari EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorBelum ada peringkat
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDokumen5 halamanDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourBelum ada peringkat
- Input-Output Linearization and Zero-Dynamics Control of Three-Phase AC/DC Voltage-Source ConvertersDokumen12 halamanInput-Output Linearization and Zero-Dynamics Control of Three-Phase AC/DC Voltage-Source ConvertersAshik AhmedBelum ada peringkat
- Current Distribution Control Design For Paralleled DC/DC Converters Using Sliding-Mode ControlDokumen10 halamanCurrent Distribution Control Design For Paralleled DC/DC Converters Using Sliding-Mode ControlAnushya RavikumarBelum ada peringkat
- A Comparative Study of Active and Reactive Power Controller For A Doubly Fed Induction Generator (Dfig) Using DPC and Foc StrategiesDokumen11 halamanA Comparative Study of Active and Reactive Power Controller For A Doubly Fed Induction Generator (Dfig) Using DPC and Foc Strategiesd_d_trivediBelum ada peringkat
- Dynamic Modeling and Analysis of The Bidirectional DCDC Boost-Buck ConverterDokumen40 halamanDynamic Modeling and Analysis of The Bidirectional DCDC Boost-Buck ConverterAndresSs NineBelum ada peringkat
- Cep PeDokumen25 halamanCep PeJaveriaBelum ada peringkat
- UPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourDokumen8 halamanUPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourMmillion AlemayehuBelum ada peringkat
- IEEE 2011 April Boost ConverterDokumen16 halamanIEEE 2011 April Boost Convertersam chenBelum ada peringkat
- Control of A Single-Stage Three-Phase Boost Power Factor Correction RectifierDokumen6 halamanControl of A Single-Stage Three-Phase Boost Power Factor Correction RectifierGoriparthi SambasievaraavBelum ada peringkat
- Fuzzy Logic Controlled Bidirectional DC-DC Converter Applied To DC DriveDokumen12 halamanFuzzy Logic Controlled Bidirectional DC-DC Converter Applied To DC DriveTJPRC PublicationsBelum ada peringkat
- INCISCOS Buck Boost PSODokumen7 halamanINCISCOS Buck Boost PSOPaul EcheverríaBelum ada peringkat
- Performance Estimation of Tristate DC-DC Buck Converter With Fixed Frequency and Constant Switching Hysteresis ControlDokumen10 halamanPerformance Estimation of Tristate DC-DC Buck Converter With Fixed Frequency and Constant Switching Hysteresis ControleditorijaiemBelum ada peringkat
- Fuzzy Based Supervision of DC Link PI Control in A DSTATCOM 2008Dokumen6 halamanFuzzy Based Supervision of DC Link PI Control in A DSTATCOM 2008Dhammunodu MlaBelum ada peringkat
- Buck Boost ProjectDokumen24 halamanBuck Boost ProjectRonald LugwireBelum ada peringkat
- Frequency-Domain Characterization of Sliding Mode Control of An Inverter Used in DSTATCOM ApplicationDokumen15 halamanFrequency-Domain Characterization of Sliding Mode Control of An Inverter Used in DSTATCOM ApplicationShwetaGautamBelum ada peringkat
- A Benchmark System For Digital Time-Domain Simulation of An Active Power FilterDokumen8 halamanA Benchmark System For Digital Time-Domain Simulation of An Active Power FilterAndreeaBelum ada peringkat
- Abdullah 2013Dokumen6 halamanAbdullah 2013Vikas PatelBelum ada peringkat
- Lyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source ConvertersDokumen13 halamanLyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source Converterssachin kumarBelum ada peringkat
- IET Power Electronics Research Article Presents Adaptive Sliding Mode Control MethodDokumen10 halamanIET Power Electronics Research Article Presents Adaptive Sliding Mode Control MethodTran Cuong HungBelum ada peringkat
- Self 4Dokumen8 halamanSelf 4ShenbagalakshmiBelum ada peringkat
- 9 1 4 PDFDokumen14 halaman9 1 4 PDFarezkifekikBelum ada peringkat
- Anki A Unified Control Strategy For Three-Phase Inverter PDFDokumen16 halamanAnki A Unified Control Strategy For Three-Phase Inverter PDFRavi KumarBelum ada peringkat
- Wanchak Lenwari Milijana OdavicDokumen5 halamanWanchak Lenwari Milijana OdavicAndreeaBelum ada peringkat
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsDokumen6 halamanA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviBelum ada peringkat
- Power-Current Controller Based Sliding Mode Control For DFIG-wind Energy Conversion SystemDokumen45 halamanPower-Current Controller Based Sliding Mode Control For DFIG-wind Energy Conversion SystemstarboyBelum ada peringkat
- QBC With Fuzzy 3Dokumen7 halamanQBC With Fuzzy 3Nishanthi BheemanBelum ada peringkat
- Simulation of D-Q Control System For A Unified Power Flow ControllerDokumen10 halamanSimulation of D-Q Control System For A Unified Power Flow ControllerSyed Faizan AliBelum ada peringkat
- Utility Interface Issues for PWM Converters: A Comparative StudyDokumen8 halamanUtility Interface Issues for PWM Converters: A Comparative StudyLava KumarBelum ada peringkat
- Modeling and Simulation of SRF and P-Q Based Control DstatcomDokumen7 halamanModeling and Simulation of SRF and P-Q Based Control DstatcomIJERDBelum ada peringkat
- Toward Power Quality Management in Hybrid AC–DC Microgrid Using LTC-L Utility Interactive InverterDokumen6 halamanToward Power Quality Management in Hybrid AC–DC Microgrid Using LTC-L Utility Interactive InverteryugeswarBelum ada peringkat
- C7 RobustControlofDC-DCBoostConvertersforSolarSystemsDokumen7 halamanC7 RobustControlofDC-DCBoostConvertersforSolarSystemsOle Johan BondahlBelum ada peringkat
- PSCAD EMTDC, FuzzyControl, HVDC Transmission, VoltageDependentCurrentOrderLimit VDCOLDokumen9 halamanPSCAD EMTDC, FuzzyControl, HVDC Transmission, VoltageDependentCurrentOrderLimit VDCOLKurniawan Indra LeksanaBelum ada peringkat
- Sliding Mode Control For Electro-Hydraulic Servo System: IJCCCE Vol.15, No.3, 2015Dokumen10 halamanSliding Mode Control For Electro-Hydraulic Servo System: IJCCCE Vol.15, No.3, 2015Anh PhamBelum ada peringkat
- 04510005-Behan Ka LundDokumen6 halaman04510005-Behan Ka LundmontykhannaBelum ada peringkat
- Docs 3396757885dc8d92655bafDokumen11 halamanDocs 3396757885dc8d92655bafRival PratamaBelum ada peringkat
- Non-Linear Predictive Control of A DC-to-DC ConverterDokumen5 halamanNon-Linear Predictive Control of A DC-to-DC ConvertermenguemengueBelum ada peringkat
- A Low Cost Flyback CCM Inverter For AC Module ApplicationDokumen9 halamanA Low Cost Flyback CCM Inverter For AC Module Applicationvinay kumarBelum ada peringkat
- Analysis, Modeling, and Control of Half-Bridge Current-Source Converter For Energy Management of Supercapacitor Modules in Traction ApplicationsDokumen22 halamanAnalysis, Modeling, and Control of Half-Bridge Current-Source Converter For Energy Management of Supercapacitor Modules in Traction ApplicationsHương B DlightBelum ada peringkat
- Control H BridgeDokumen5 halamanControl H BridgeFahad Al-shammeriBelum ada peringkat
- Paper 15Dokumen13 halamanPaper 15RakeshconclaveBelum ada peringkat
- Modeling Wind Farms For Power System LoadDokumen8 halamanModeling Wind Farms For Power System LoadArmando MaloneBelum ada peringkat
- Energies: An Improved Current Control Strategy For A Grid-Connected Inverter Under Distorted Grid ConditionsDokumen23 halamanEnergies: An Improved Current Control Strategy For A Grid-Connected Inverter Under Distorted Grid Conditionsjuniorj123Belum ada peringkat
- New Approach For Modelling Doubly-Fed Induction Generator (DFIG) For Grid-Connection StudiesDokumen13 halamanNew Approach For Modelling Doubly-Fed Induction Generator (DFIG) For Grid-Connection StudiesKhalid HarounBelum ada peringkat
- Sensorless Current Mode Control-An Observer-Based Technique For DC-DC ConvertersDokumen5 halamanSensorless Current Mode Control-An Observer-Based Technique For DC-DC ConvertersDipanjan DasBelum ada peringkat
- Modeling and Control For A Bidirectional Buck-Boost Cascade InverterDokumen13 halamanModeling and Control For A Bidirectional Buck-Boost Cascade InverterAndrewJohnsonJenssonBelum ada peringkat
- Using Twenty Four Pulse AC-DC Converter Employing Pulse Doubling TechniqueDokumen11 halamanUsing Twenty Four Pulse AC-DC Converter Employing Pulse Doubling Techniquebakien-canBelum ada peringkat
- Review of Reactive Power Compensation TechnologiesDokumen79 halamanReview of Reactive Power Compensation TechnologiesRadu BabauBelum ada peringkat
- Sliding ModeDokumen13 halamanSliding ModeSiva Ganesh MallaBelum ada peringkat
- Classical Control Methods for Power ConvertersDokumen9 halamanClassical Control Methods for Power ConvertersEmmeth ArdienteBelum ada peringkat
- Electro HydraulicDokumen20 halamanElectro HydraulicAnkit KumarBelum ada peringkat
- Icbdm 29 PDFDokumen6 halamanIcbdm 29 PDFPudhur Kannan ManiBelum ada peringkat
- AbstractDokumen3 halamanAbstractsaurabh guptaBelum ada peringkat
- Constrained Model-Based Predictive Controller For A High-Frequency Low-Power DC-DC Buck ConverterDokumen24 halamanConstrained Model-Based Predictive Controller For A High-Frequency Low-Power DC-DC Buck ConverterShaheer DurraniBelum ada peringkat
- 2010 An Improved Control Strategy Using A PI-Resonant Controller For An Unbalanced Stand-Alone Doubly-Fed Induction GeneratorDokumen10 halaman2010 An Improved Control Strategy Using A PI-Resonant Controller For An Unbalanced Stand-Alone Doubly-Fed Induction Generatordaiduongxanh14113Belum ada peringkat
- PWM DC Converters as an Alternative for Power Line ConditioningDokumen0 halamanPWM DC Converters as an Alternative for Power Line ConditioningpviveknaiduBelum ada peringkat
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDari EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetBelum ada peringkat
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDari EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetPenilaian: 2 dari 5 bintang2/5 (1)
- 3 111-04 PDFDokumen6 halaman3 111-04 PDFsethukumarkBelum ada peringkat
- A New Approach For Torque Ripple Minimization in Brushless DC Motor Using Sepic Converter 2167 101X.1000106 PDFDokumen5 halamanA New Approach For Torque Ripple Minimization in Brushless DC Motor Using Sepic Converter 2167 101X.1000106 PDFsethukumarkBelum ada peringkat
- Types of Measurements - 2007 - 30Dokumen30 halamanTypes of Measurements - 2007 - 30Prakash ThangavelBelum ada peringkat
- Lakic Dragoljub PDFDokumen4 halamanLakic Dragoljub PDFsethukumarkBelum ada peringkat
- Sliding Mode Controller Gains Optimization for Boost PFCDokumen6 halamanSliding Mode Controller Gains Optimization for Boost PFCsethukumarkBelum ada peringkat
- Analysis of Advanced Techniques To Eliminate Harmonics in AC DrivesDokumen8 halamanAnalysis of Advanced Techniques To Eliminate Harmonics in AC DrivessethukumarkBelum ada peringkat
- ProjectDokumen13 halamanProjectAnkit VishwakarmaBelum ada peringkat
- A Review Paper On Torque Ripple Reduction and Power Quality Improvement in Brushless DC Motor PDFDokumen9 halamanA Review Paper On Torque Ripple Reduction and Power Quality Improvement in Brushless DC Motor PDFsethukumarkBelum ada peringkat
- Principles of 2-sliding mode design: 夡 Arie LevantDokumen11 halamanPrinciples of 2-sliding mode design: 夡 Arie LevantsethukumarkBelum ada peringkat
- Direct Self Control of Induction Motor Based On Neural NetworkDokumen9 halamanDirect Self Control of Induction Motor Based On Neural NetworksethukumarkBelum ada peringkat
- Direct Self Control of Induction Motor Based On Neural NetworkDokumen9 halamanDirect Self Control of Induction Motor Based On Neural NetworksethukumarkBelum ada peringkat
- Types of Measurements - 2007 - 30Dokumen30 halamanTypes of Measurements - 2007 - 30Prakash ThangavelBelum ada peringkat
- 8 - Jpe 13 11 009Dokumen11 halaman8 - Jpe 13 11 009sethukumarkBelum ada peringkat
- WTHD minimisation in hybrid multilevel inverter using BBODokumen10 halamanWTHD minimisation in hybrid multilevel inverter using BBOsethukumarkBelum ada peringkat
- EE2403Dokumen6 halamanEE2403sethukumarkBelum ada peringkat
- DC Machine - BeeeDokumen59 halamanDC Machine - BeeesethukumarkBelum ada peringkat
- Jeas 1011 574Dokumen11 halamanJeas 1011 574sethukumarkBelum ada peringkat
- DC Machine - BeeeDokumen59 halamanDC Machine - BeeesethukumarkBelum ada peringkat
- Ijest12 04 06 202Dokumen5 halamanIjest12 04 06 202sethukumarkBelum ada peringkat
- Report Lavi 123Dokumen7 halamanReport Lavi 123sethukumarkBelum ada peringkat
- Two Mark Question Answer: Unit I Measurement of Voltage and CurrentDokumen8 halamanTwo Mark Question Answer: Unit I Measurement of Voltage and CurrentPraveen Chandran C RBelum ada peringkat
- Design of Low Power High Efficient FFT ProcessorDokumen7 halamanDesign of Low Power High Efficient FFT ProcessorsethukumarkBelum ada peringkat
- Pec Syllabus 2013Dokumen92 halamanPec Syllabus 2013Lincoln BurrowsBelum ada peringkat
- Photoshop Cs4 Tools ExplainedDokumen29 halamanPhotoshop Cs4 Tools ExplainedManjot Singh100% (1)
- Real-Time Selective Harmonic Minimization For Multilevel InverterDokumen151 halamanReal-Time Selective Harmonic Minimization For Multilevel InvertersethukumarkBelum ada peringkat
- Advanced DC/DC Converters: Fang Lin Luo Hong YeDokumen27 halamanAdvanced DC/DC Converters: Fang Lin Luo Hong YesethukumarkBelum ada peringkat
- Basic PLCDokumen77 halamanBasic PLCrpshvju100% (1)
- DSE Recruitment 121012Dokumen5 halamanDSE Recruitment 121012sethukumarkBelum ada peringkat
- Advanced DC/DC Converters: Fang Lin Luo Hong YeDokumen27 halamanAdvanced DC/DC Converters: Fang Lin Luo Hong YesethukumarkBelum ada peringkat
- Star Delta Starter Guide - Maximum Torque & Efficiency ProofsDokumen12 halamanStar Delta Starter Guide - Maximum Torque & Efficiency ProofsMostafa Faisal AboelezzBelum ada peringkat
- Concept of Sinusoidal Distributed Windings: Appendix ADokumen9 halamanConcept of Sinusoidal Distributed Windings: Appendix ASarvasaisrinathBelum ada peringkat
- DC/DC converter CPC 1500B Series product descriptionDokumen14 halamanDC/DC converter CPC 1500B Series product descriptiondavid mendezBelum ada peringkat
- Rugged Multi-Axis Joystick Controls Heavy EquipmentDokumen11 halamanRugged Multi-Axis Joystick Controls Heavy Equipmentdjoko123Belum ada peringkat
- Hydrastep and Hydratect Water/Steam Monitoring SystemsDokumen12 halamanHydrastep and Hydratect Water/Steam Monitoring Systemscytech6619Belum ada peringkat
- Photodetectors: 2D Materials and HeterostructuresDokumen18 halamanPhotodetectors: 2D Materials and HeterostructuresVargheseAbinBelum ada peringkat
- SQ416V-SQ420V-SQ420W-SQ625W-SQ416Q-SQ420Q - Wiring Manual PDFDokumen153 halamanSQ416V-SQ420V-SQ420W-SQ625W-SQ416Q-SQ420Q - Wiring Manual PDFDaniel BarrientosBelum ada peringkat
- Proficiency Testing Program Status: E26 E23 E35 E39 E11 E45 E42 E43-1 E43-2 E40-2 E40-1 E40-1 E29Dokumen3 halamanProficiency Testing Program Status: E26 E23 E35 E39 E11 E45 E42 E43-1 E43-2 E40-2 E40-1 E40-1 E29Muttaki HasanBelum ada peringkat
- PMC-340 & 220 Catalogue (20161123S)Dokumen3 halamanPMC-340 & 220 Catalogue (20161123S)Ronald H SantosBelum ada peringkat
- Fundamentals of Electromagnetic Wave PropagationDokumen26 halamanFundamentals of Electromagnetic Wave PropagationUMEESSBelum ada peringkat
- Chapter 4 DC MachineDokumen101 halamanChapter 4 DC Machinekelemyas ayalew100% (2)
- Pinpointer PetrapinDokumen15 halamanPinpointer PetrapinNacer MezghicheBelum ada peringkat
- Programming Amd'S Cmos EpromsDokumen11 halamanProgramming Amd'S Cmos EpromsrwpaulaBelum ada peringkat
- PGK 70 HBDokumen34 halamanPGK 70 HBArturo Conde (Fonkel Mexicana)Belum ada peringkat
- Data Center RequirementsDokumen3 halamanData Center Requirementsconsultnadeem70Belum ada peringkat
- Zonk Machine AnalysisDokumen5 halamanZonk Machine AnalysisRobWileyBelum ada peringkat
- Mehebub ElectromagnetismDokumen29 halamanMehebub ElectromagnetismMehebub PhysicsBelum ada peringkat
- Solar Floating at EGAT 'S ProjectDokumen41 halamanSolar Floating at EGAT 'S ProjectChong Jiazhen50% (2)
- Movidrive Compact MCF/MCV/MCS4 - A: Operating InstructionsDokumen112 halamanMovidrive Compact MCF/MCV/MCS4 - A: Operating InstructionsBrahem MoutiaBelum ada peringkat
- Learn to Simulate Circuits in 30 Minutes with MultisimDokumen6 halamanLearn to Simulate Circuits in 30 Minutes with MultisimkhyatichavdaBelum ada peringkat
- 3+2 Multiphase PWM Regulator For Intel Imvp8™ Desktop Cpus: DatasheetDokumen2 halaman3+2 Multiphase PWM Regulator For Intel Imvp8™ Desktop Cpus: DatasheetTomy Aditya PratamaBelum ada peringkat
- Split Phase Motor ExplainedDokumen1 halamanSplit Phase Motor ExplainedJenny MaristelaBelum ada peringkat
- Regulation 2015Dokumen8 halamanRegulation 2015syed althafBelum ada peringkat
- Tethers in Space Handbook 1997Dokumen274 halamanTethers in Space Handbook 1997greeneggsandspam6Belum ada peringkat
- NEMA Standard Motor CurvesDokumen1 halamanNEMA Standard Motor CurvesbradrogerBelum ada peringkat
- Optical ComDokumen20 halamanOptical ComMelsougly BryceBelum ada peringkat
- Developing EV Charging Stations in VietnamDokumen28 halamanDeveloping EV Charging Stations in VietnamQuang Linh Lê100% (1)
- RL Drake Low Pass Filter Installation GuideDokumen1 halamanRL Drake Low Pass Filter Installation Guide240GL guyBelum ada peringkat
- Power Systems ClipperDokumen8 halamanPower Systems ClipperBilly SeasonsBelum ada peringkat
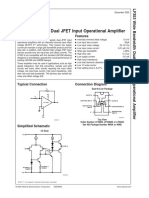
- Datasheet LF 353Dokumen14 halamanDatasheet LF 353Anggridho MeilandanuBelum ada peringkat