Anda mungkin juga menyukai
- Design of Bolted Beam Splice Connections According To EC3Dokumen11 halamanDesign of Bolted Beam Splice Connections According To EC3Franklyn Genove100% (2)
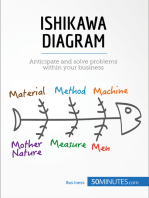
- Ishikawa Diagram: Anticipate and solve problems within your businessDari EverandIshikawa Diagram: Anticipate and solve problems within your businessPenilaian: 5 dari 5 bintang5/5 (3)
- Analytical Chemistry Basic ConceptsDokumen12 halamanAnalytical Chemistry Basic ConceptsNino Jay FabrosBelum ada peringkat
- White Paper Hydraulic Press Calculation-SflbDokumen3 halamanWhite Paper Hydraulic Press Calculation-SflbHamam SuhailyBelum ada peringkat
- Mechanical Properties OF Dental MaterialsDokumen40 halamanMechanical Properties OF Dental MaterialsRamnarayan MeenaBelum ada peringkat
- Towards A Generic Process For SPL Re-EngineeringDokumen8 halamanTowards A Generic Process For SPL Re-Engineeringኢየሩሳሌም ገብረ ክርስቶስBelum ada peringkat
- Chapter Six Conclusion & EnhancementDokumen6 halamanChapter Six Conclusion & EnhancementMohamed Ahmed AbdiBelum ada peringkat
- An Evaluation of Domain Analysis MethodsDokumen12 halamanAn Evaluation of Domain Analysis MethodsSusan OwensBelum ada peringkat
- PHD Research Proposal Aspects To Support The Software ProcessDokumen5 halamanPHD Research Proposal Aspects To Support The Software Process_peachBelum ada peringkat
- Comparison Between Traditional Approach and Object-Oriented Approach in Software Engineering DevelopmentDokumen7 halamanComparison Between Traditional Approach and Object-Oriented Approach in Software Engineering DevelopmentEditor IJACSABelum ada peringkat
- Research Design and MethodologyDokumen13 halamanResearch Design and MethodologyJepoy EnesioBelum ada peringkat
- Information Systems - Assignment 2Dokumen9 halamanInformation Systems - Assignment 2denize1992Belum ada peringkat
- 2017 WorkingPaper-AgilityInSystemsEngineeringFindingsDokumen7 halaman2017 WorkingPaper-AgilityInSystemsEngineeringFindingsElena OpreaBelum ada peringkat
- Optimized Resource Allocation For Software Release Planning: An Ngo-The and Gu Nther Ruhe, Senior Member, IEEEDokumen15 halamanOptimized Resource Allocation For Software Release Planning: An Ngo-The and Gu Nther Ruhe, Senior Member, IEEEArogyamma ArogyaBelum ada peringkat
- Crystal: Methods and Spiral Lifecycle ModelDokumen23 halamanCrystal: Methods and Spiral Lifecycle Modelsax_loverBelum ada peringkat
- System Development MethodologiesDokumen13 halamanSystem Development MethodologiesMay Ann Agcang SabelloBelum ada peringkat
- Esd WP 2002 03 PDFDokumen12 halamanEsd WP 2002 03 PDFummanBelum ada peringkat
- Operations Research April 2023 ExaminationDokumen12 halamanOperations Research April 2023 ExaminationAssignment HuntBelum ada peringkat
- Design and Management of Software Development Projects Under Rework Uncertainty A Study Using System DynamicsDokumen25 halamanDesign and Management of Software Development Projects Under Rework Uncertainty A Study Using System DynamicsSimranBelum ada peringkat
- Using Business Process Reengineering To Obtain A RAISE SpecificationDokumen7 halamanUsing Business Process Reengineering To Obtain A RAISE SpecificationAdnan F. RehmanBelum ada peringkat
- 10Dokumen7 halaman10nishan0440Belum ada peringkat
- Updated Sample Docu From Thesis Book For Appdev 1Dokumen26 halamanUpdated Sample Docu From Thesis Book For Appdev 1ROMMEL DORINBelum ada peringkat
- Practical: 1: Dr. Subhash Technical CampusDokumen58 halamanPractical: 1: Dr. Subhash Technical CampusDhruvi MandaviyaBelum ada peringkat
- Chapter 3Dokumen8 halamanChapter 3Roel Rosal LazoBelum ada peringkat
- Unit 5 Ooad 2020Dokumen24 halamanUnit 5 Ooad 2020LAVANYA KARTHIKEYANBelum ada peringkat
- Software Development Cost Estimation Approaches - A SurveyDokumen46 halamanSoftware Development Cost Estimation Approaches - A SurveyRavi SankarBelum ada peringkat
- LEC 3 Information System PlanningDokumen6 halamanLEC 3 Information System PlanningJEMIMA MILES CASIBUABelum ada peringkat
- Parts of Capstone Project DocumentDokumen7 halamanParts of Capstone Project DocumentEleiyuarihel Jeyni100% (1)
- ISBSG Variables Most Frequently Used For Software EffortDokumen4 halamanISBSG Variables Most Frequently Used For Software Effortsuibian.270619Belum ada peringkat
- AI in CAPPDokumen6 halamanAI in CAPPDhanabal Palanisamy PBelum ada peringkat
- Umbrella ActivitiesDokumen25 halamanUmbrella ActivitiesYogiPradana100% (1)
- A Comparative Study On Software Development ModelsDokumen9 halamanA Comparative Study On Software Development ModelsInternational Journal of Application or Innovation in Engineering & ManagementBelum ada peringkat
- BC0057 - Object Oriented Analysis and DesignDokumen8 halamanBC0057 - Object Oriented Analysis and DesignShrinivas DasariBelum ada peringkat
- Chapter 1Dokumen27 halamanChapter 1YE' JEMBRU Lige EshetuBelum ada peringkat
- SEPA Wanderley FinalDokumen15 halamanSEPA Wanderley FinalJoao JuniorBelum ada peringkat
- Activity 1 - SolutionsDokumen7 halamanActivity 1 - Solutionsomaralmutawa1Belum ada peringkat
- Y.P.Sreedevi: Software Development Life CycleDokumen23 halamanY.P.Sreedevi: Software Development Life Cyclevictorj63Belum ada peringkat
- A Genetic Algorithm Based Clustering Framework For Detection of Software Process Model CompatibilitiesDokumen5 halamanA Genetic Algorithm Based Clustering Framework For Detection of Software Process Model CompatibilitiesInternational Journal of Application or Innovation in Engineering & ManagementBelum ada peringkat
- Integrating Creativity Into Requirements ProcessesDokumen12 halamanIntegrating Creativity Into Requirements ProcessesMohammed Samir KhokarBelum ada peringkat
- CHAPTER 4&5:: System Development ProcessDokumen79 halamanCHAPTER 4&5:: System Development ProcesschenlyBelum ada peringkat
- 6ed Solutions Chap08Dokumen22 halaman6ed Solutions Chap08JesseSpero50% (2)
- Topic of Ch-5 Feasibility Study & Software Project EstimationDokumen6 halamanTopic of Ch-5 Feasibility Study & Software Project EstimationSaakshi PatelBelum ada peringkat
- Module 3Dokumen12 halamanModule 3efrenBelum ada peringkat
- 4 - MohammadNaderuzzaman - FinalPaper - IISTE Research PaperDokumen7 halaman4 - MohammadNaderuzzaman - FinalPaper - IISTE Research PaperiisteBelum ada peringkat
- G2 SEBo KDokumen47 halamanG2 SEBo KFábio De Toledo Fontana100% (1)
- 02 NovemberDokumen4 halaman02 NovemberВаня ТімковBelum ada peringkat
- CSC211, Hand OutsDokumen107 halamanCSC211, Hand OutsNaveed KhanBelum ada peringkat
- f783 PDFDokumen4 halamanf783 PDFRafinaBelum ada peringkat
- Software Development Proces 2Dokumen24 halamanSoftware Development Proces 2Marvin Njenga100% (1)
- Software ReuseDokumen6 halamanSoftware ReuseRahul Abhishek MehraBelum ada peringkat
- Rumbaugh's Object Modelling Technique (OMT) - : Unit Ii Object Oriented Methodologies 9Dokumen71 halamanRumbaugh's Object Modelling Technique (OMT) - : Unit Ii Object Oriented Methodologies 9ASUIUX DesignerBelum ada peringkat
- Show 1Dokumen28 halamanShow 1Sukruth RanganathanBelum ada peringkat
- Chapter Three: System Development Life Cycle (SDLC)Dokumen10 halamanChapter Three: System Development Life Cycle (SDLC)Gemechis Lema100% (1)
- Chapter 2Dokumen4 halamanChapter 2jego gomezBelum ada peringkat
- Approaches To System DevelopmentDokumen14 halamanApproaches To System DevelopmentLonAtanacioBelum ada peringkat
- DS87 Vol9 DesEdu 302Dokumen10 halamanDS87 Vol9 DesEdu 302Lyka joy pascuaBelum ada peringkat
- Software Design: Towards A Meta-Architecture To Support Decision Making in The Definition of Software ArchitectureDokumen6 halamanSoftware Design: Towards A Meta-Architecture To Support Decision Making in The Definition of Software ArchitectureararoqBelum ada peringkat
- Scrum AirplanesDokumen16 halamanScrum AirplanesjeyaganeshnBelum ada peringkat
- Week 5 Learning Resources Information Systems DevelopmentDokumen37 halamanWeek 5 Learning Resources Information Systems DevelopmentSarves RajBelum ada peringkat
- Object Oriented Analysis and Design UNIT-1Dokumen41 halamanObject Oriented Analysis and Design UNIT-1Maha LakshmiBelum ada peringkat
- Ptas 1Dokumen20 halamanPtas 1Sweta UmraoBelum ada peringkat
- SAD - Lecture 04A - SAD METHODOLOGIESDokumen12 halamanSAD - Lecture 04A - SAD METHODOLOGIESJhann Essa NadiaBelum ada peringkat
- Belief Networks in Construction SimulationDokumen8 halamanBelief Networks in Construction SimulationaeroacademicBelum ada peringkat
- MICROECONOMICS ch07ANNEXDokumen6 halamanMICROECONOMICS ch07ANNEXSabrina GoBelum ada peringkat
- T316Dokumen5 halamanT316ANKIT SHARMA100% (1)
- Report TextDokumen2 halamanReport Textsusila10Belum ada peringkat
- Applied Calculus For It - 501031 Essay: 1 IntructionsDokumen2 halamanApplied Calculus For It - 501031 Essay: 1 IntructionsSơn NamBelum ada peringkat
- Experimental and Theoretical Study of Pool BoilingDokumen11 halamanExperimental and Theoretical Study of Pool Boilingvaibhav pawarBelum ada peringkat
- Journey To The Edge of ReasonDokumen337 halamanJourney To The Edge of ReasonFrancesco CavinaBelum ada peringkat
- Fabrication Layout Design Rules 2005Dokumen28 halamanFabrication Layout Design Rules 2005lai_infoBelum ada peringkat
- LG Lx-U250a Lxs-U250Dokumen55 halamanLG Lx-U250a Lxs-U250remanuel18Belum ada peringkat
- 18.06 Problem Set 3 SolutionsDokumen5 halaman18.06 Problem Set 3 SolutionsgadasBelum ada peringkat
- Jenway 74 76 Series BrochureDokumen6 halamanJenway 74 76 Series BrochureSadik OunisBelum ada peringkat
- Scrubber ManualDokumen41 halamanScrubber ManualRahul Sonkamble100% (1)
- SM Haddci 1-A.2 GBDokumen171 halamanSM Haddci 1-A.2 GBheorgyBelum ada peringkat
- Bab 8 Notes and Latihan Form 3 PtsiDokumen15 halamanBab 8 Notes and Latihan Form 3 PtsiShanti Guna0% (1)
- Thermodynamic Optimization of A Trigeneration System Based On Biomass CombustionDokumen9 halamanThermodynamic Optimization of A Trigeneration System Based On Biomass CombustionTiago HenriquesBelum ada peringkat
- DLL - G8 Science - Q3 - F2FDokumen2 halamanDLL - G8 Science - Q3 - F2FRAMIR BECOYBelum ada peringkat
- Week 3 Earth Science FINALDokumen4 halamanWeek 3 Earth Science FINALMichael DelivaBelum ada peringkat
- The Artist and The Mathematician - Amir AczelDokumen170 halamanThe Artist and The Mathematician - Amir AczelKike García Manyari100% (2)
- Synthesis of Nata de Coco Fiber Composite With Conductive Filler As An Eco-Friendly Semiconductor MaterialDokumen7 halamanSynthesis of Nata de Coco Fiber Composite With Conductive Filler As An Eco-Friendly Semiconductor MaterialDevit Hari AshariBelum ada peringkat
- Kepler ConjectureDokumen6 halamanKepler Conjecturechazzyjazzy11Belum ada peringkat
- PVC& CPVC SCH 80 Technical CatalogueDokumen49 halamanPVC& CPVC SCH 80 Technical CataloguekailashBelum ada peringkat
- On P-Groups of Maximal Class: August 2019Dokumen9 halamanOn P-Groups of Maximal Class: August 2019JodeBelum ada peringkat
- Astm D36Dokumen4 halamanAstm D36Sachin Kumar Singh33% (3)
- Alexandre Grothendieck (1928-2014) Germany, FranceDokumen13 halamanAlexandre Grothendieck (1928-2014) Germany, FranceDer CruzBelum ada peringkat
- Iec STD ListsDokumen6 halamanIec STD Listssasenthil241464Belum ada peringkat