Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Sustainability 11 01912 v3Dokumen22 halamanSustainability 11 01912 v3haidine_DDBonnBelum ada peringkat
- Release 0.4: Operations Requirements For The Next Generation of Mobile NetworksDokumen24 halamanRelease 0.4: Operations Requirements For The Next Generation of Mobile Networksfixme1960Belum ada peringkat
- Quality Attributes in Edge Computing For IoT - A Systematic Mapping Study - March2021Dokumen20 halamanQuality Attributes in Edge Computing For IoT - A Systematic Mapping Study - March2021haidine_DDBonnBelum ada peringkat
- Network Selection Criterion For Ubiquitous Communication Provisioning in Smart Cities - 2018Dokumen34 halamanNetwork Selection Criterion For Ubiquitous Communication Provisioning in Smart Cities - 2018haidine_DDBonnBelum ada peringkat
- OPNET - Location Based Performance of WiMAX Network For QoS With Optimal BSDokumen11 halamanOPNET - Location Based Performance of WiMAX Network For QoS With Optimal BShaidine_DDBonnBelum ada peringkat
- Quality Attributes in Edge Computing For IoT - A Systematic Mapping Study - March2021Dokumen20 halamanQuality Attributes in Edge Computing For IoT - A Systematic Mapping Study - March2021haidine_DDBonnBelum ada peringkat
- Emerging Trends in Wireless Infrastructure RND June-2022 W Rohd46Dokumen51 halamanEmerging Trends in Wireless Infrastructure RND June-2022 W Rohd46haidine_DDBonnBelum ada peringkat
- NGMN 5G White Paper V1 March-2015 NGMN AllianceDokumen125 halamanNGMN 5G White Paper V1 March-2015 NGMN Alliancehaidine_DDBonnBelum ada peringkat
- Wireless Backhaul Can Ease Transition To Fibre - SenzaFiliConsultingDokumen11 halamanWireless Backhaul Can Ease Transition To Fibre - SenzaFiliConsultinghaidine_DDBonnBelum ada peringkat
- Top 10 Considerations For A Successful 4G LTE EPC Deployment - Cisco - 2013Dokumen17 halamanTop 10 Considerations For A Successful 4G LTE EPC Deployment - Cisco - 2013haidine_DDBonnBelum ada peringkat
- Planning & Construction of LTE Networks - Ucell - 8Dokumen33 halamanPlanning & Construction of LTE Networks - Ucell - 8haidine_DDBonnBelum ada peringkat
- CELTIC Initiative "Telecommunication Solutions" - Celtic Commune d5 1 FinalDokumen59 halamanCELTIC Initiative "Telecommunication Solutions" - Celtic Commune d5 1 Finalhaidine_DDBonnBelum ada peringkat
- China Mobile CRAN White Paper v26 2014Dokumen61 halamanChina Mobile CRAN White Paper v26 2014haidine_DDBonnBelum ada peringkat
- KauppinenDokumen10 halamanKauppinenamalthejusBelum ada peringkat
- Building A Next-Generation Mobile Operator BusinessDokumen22 halamanBuilding A Next-Generation Mobile Operator Businesshaidine_DDBonnBelum ada peringkat
- A Broadband Network Cost ModelDokumen22 halamanA Broadband Network Cost Modelhaidine_DDBonnBelum ada peringkat
- Capesso Symena LTE Network DesignDokumen18 halamanCapesso Symena LTE Network Designhaidine_DDBonnBelum ada peringkat
- Frequency Assignment and Mathematics For Comm SystemsDokumen63 halamanFrequency Assignment and Mathematics For Comm Systemshaidine_DDBonnBelum ada peringkat
- A Single RAN Strategy Can Offer Double-Digit Savings For LTE Deployment: A Real TCO ComparisonDokumen12 halamanA Single RAN Strategy Can Offer Double-Digit Savings For LTE Deployment: A Real TCO Comparisonhaidine_DDBonnBelum ada peringkat
- Wireless Services Catalog 2013Dokumen32 halamanWireless Services Catalog 2013haidine_DDBonnBelum ada peringkat
- Lecture2 - Network Design and SecurityDokumen27 halamanLecture2 - Network Design and Securityhaidine_DDBonnBelum ada peringkat
- Radio Mobile Program Operating GuideDokumen79 halamanRadio Mobile Program Operating GuideuserCCCBelum ada peringkat
- 4G Mobile Broadband Evolution-Rel 10 Rel 11 and Beyond October 2012 PDFDokumen234 halaman4G Mobile Broadband Evolution-Rel 10 Rel 11 and Beyond October 2012 PDFKike Vergara PalmaBelum ada peringkat
- Chapter 5 Network Planning Wireless CDMADokumen42 halamanChapter 5 Network Planning Wireless CDMAhaidine_DDBonnBelum ada peringkat
- File To UploadDokumen8 halamanFile To Uploadhaidine_DDBonnBelum ada peringkat
- Network Desgin Part1Dokumen13 halamanNetwork Desgin Part1Thomas GarzaBelum ada peringkat
- Upload Data ManagementDokumen1 halamanUpload Data Managementhaidine_DDBonnBelum ada peringkat
- EC Mandate M441 - Smart Metering StandardsDokumen4 halamanEC Mandate M441 - Smart Metering Standardshaidine_DDBonnBelum ada peringkat
- Kopie Von Giving An Oral PresentationDokumen1 halamanKopie Von Giving An Oral Presentationhaidine_DDBonnBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Kruskal's Algorithm: Melanie FerreriDokumen21 halamanKruskal's Algorithm: Melanie FerreriWork 133Belum ada peringkat
- Edge Detection PDFDokumen9 halamanEdge Detection PDFRutvi DhameliyaBelum ada peringkat
- Optimization of Airport Check-In Scheduling at Passenger TerminalDokumen14 halamanOptimization of Airport Check-In Scheduling at Passenger TerminalReynhard DaleBelum ada peringkat
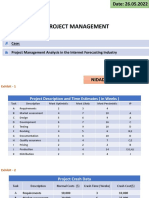
- Project Management Analysis in The Internet Forecasting IndustryDokumen14 halamanProject Management Analysis in The Internet Forecasting IndustryNiranjan NidadavoluBelum ada peringkat
- Lecture 4 - Transfer Function Models (p7)Dokumen16 halamanLecture 4 - Transfer Function Models (p7)Elia SaadBelum ada peringkat
- BSCS PPT Daa N01Dokumen38 halamanBSCS PPT Daa N01Jacque Landrito Zurbito100% (1)
- Matutum View Academy: (The School of Faith)Dokumen8 halamanMatutum View Academy: (The School of Faith)Neil Trezley Sunico BalajadiaBelum ada peringkat
- Kumar Online Class: Cbse (Ncert) : Class X MathsDokumen14 halamanKumar Online Class: Cbse (Ncert) : Class X MathsMathan RamasamyBelum ada peringkat
- skf2133 Chapter2nDokumen28 halamanskf2133 Chapter2nJosé Luis MasacheBelum ada peringkat
- Number Theoretic AlgorithmsDokumen134 halamanNumber Theoretic AlgorithmsNetaji SagaramBelum ada peringkat
- Fenics Discontinuous GalerkinDokumen20 halamanFenics Discontinuous GalerkinNishant PandaBelum ada peringkat
- Assign 3Dokumen1 halamanAssign 3Abhishek VermaBelum ada peringkat
- CQF CurriculumDokumen21 halamanCQF Curriculumernesto123_53Belum ada peringkat
- Practice To Simulink: Create A New Model For Searching Blockset Group / BlockDokumen12 halamanPractice To Simulink: Create A New Model For Searching Blockset Group / BlockmahabalabhattBelum ada peringkat
- Operations Management-Chapter Four-1Dokumen44 halamanOperations Management-Chapter Four-1AGBelum ada peringkat
- MANSI BHARNE 16/10/2020: Unit X: Statistical Decision TheoryDokumen4 halamanMANSI BHARNE 16/10/2020: Unit X: Statistical Decision TheoryVrushab PunjabiBelum ada peringkat
- Jacobi Method For Nonlinear First-Order PdesDokumen3 halamanJacobi Method For Nonlinear First-Order Pdesimma coverBelum ada peringkat
- Equipment Selection: MI5073: Planificación MineraDokumen29 halamanEquipment Selection: MI5073: Planificación MineraVale RCBelum ada peringkat
- ISYE 3039 Methods For Quality Improvement Spring 2013 Homework 1 SolutionDokumen3 halamanISYE 3039 Methods For Quality Improvement Spring 2013 Homework 1 Solutionsarah.alg85Belum ada peringkat
- Test1 Key PDFDokumen8 halamanTest1 Key PDFMoHaN'sBelum ada peringkat
- Data Science Interview Questions: Answer HereDokumen54 halamanData Science Interview Questions: Answer Hereneeraj12121Belum ada peringkat
- IEC 62351-4 Security Implementations For IEC 61850 MMS MessagesDokumen7 halamanIEC 62351-4 Security Implementations For IEC 61850 MMS MessagesreynaldorxBelum ada peringkat
- RC5 Cipher - WikipediaDokumen5 halamanRC5 Cipher - WikipediaCARLOSMIGUEZBelum ada peringkat
- L. PCM DM and DPCMDokumen27 halamanL. PCM DM and DPCMMojtaba Falah alaliBelum ada peringkat
- OR AssignmentDokumen6 halamanOR AssignmentSanjay YadavBelum ada peringkat
- MIT18 02SC Notes 21Dokumen3 halamanMIT18 02SC Notes 21Martha TaniaBelum ada peringkat
- Matrix Multiplication by Brute ForceDokumen3 halamanMatrix Multiplication by Brute ForceDio DharmawanBelum ada peringkat
- FLOWCHARTDokumen26 halamanFLOWCHARTStanley BennettBelum ada peringkat
- Paper 52-Modeling and Solving The Open End Bin PackingDokumen6 halamanPaper 52-Modeling and Solving The Open End Bin PackingChaitanyaManoharBelum ada peringkat
- Grupo B Essay of The Article "Statistical Mechanics and Thermodynamics: A Maxwellian View"Dokumen5 halamanGrupo B Essay of The Article "Statistical Mechanics and Thermodynamics: A Maxwellian View"Juan Camilo GeredaBelum ada peringkat