Anda mungkin juga menyukai
- Carpet AreaDokumen20 halamanCarpet AreaJKBelum ada peringkat
- Rudram TelDokumen13 halamanRudram TelJKBelum ada peringkat
- TcodesabapDokumen9 halamanTcodesabapSRILAKSHMIBelum ada peringkat
- A Short Tutorial On User ExitsDokumen2 halamanA Short Tutorial On User ExitsJKBelum ada peringkat
- Roles & Responsibilities of Testing ManagerDokumen2 halamanRoles & Responsibilities of Testing ManagerJKBelum ada peringkat
- Process AbapDokumen1 halamanProcess AbapSRILAKSHMIBelum ada peringkat
- Process AbapDokumen1 halamanProcess AbapSRILAKSHMIBelum ada peringkat
- What Is The Difference Between SMOD and CMODDokumen2 halamanWhat Is The Difference Between SMOD and CMODJKBelum ada peringkat
- Process AbapDokumen1 halamanProcess AbapSRILAKSHMIBelum ada peringkat
- Abap First ProgDokumen1 halamanAbap First ProgSRILAKSHMIBelum ada peringkat
- Wix License NoteDokumen2 halamanWix License NoteFredyRodriguezGarciaBelum ada peringkat
- Number Range GenerationDokumen2 halamanNumber Range GenerationJKBelum ada peringkat
- ISO-8859-1 - EAMCET Chemistry Sample Paper 1Dokumen16 halamanISO-8859-1 - EAMCET Chemistry Sample Paper 1nidhisngh8Belum ada peringkat
- Role of ConsultantDokumen2 halamanRole of ConsultantJKBelum ada peringkat
- User Change Request During Support PhaseDokumen3 halamanUser Change Request During Support PhaseJKBelum ada peringkat
- Liu 2011 GLB SigmetricsDokumen12 halamanLiu 2011 GLB SigmetricsJKBelum ada peringkat
- Field Exits (SMOD/CMOD) Questions and AnswersDokumen3 halamanField Exits (SMOD/CMOD) Questions and AnswerscarlosseneBelum ada peringkat
- A Short Tutorial On User ExitsDokumen2 halamanA Short Tutorial On User ExitsJKBelum ada peringkat
- EEFA Part B QuestionsDokumen2 halamanEEFA Part B QuestionsJKBelum ada peringkat
- How To Install CobolDokumen18 halamanHow To Install CobolJKBelum ada peringkat
- Raspberry Pi Tips Tricks Hacks Volume 1 Second Revised EditionDokumen164 halamanRaspberry Pi Tips Tricks Hacks Volume 1 Second Revised EditionJKBelum ada peringkat
- GuruGita IntroDokumen3 halamanGuruGita IntroJKBelum ada peringkat
- The Ultimate PC Building Handbook Volume 2Dokumen180 halamanThe Ultimate PC Building Handbook Volume 2Bao Vinh100% (5)
- JaicoDokumen13 halamanJaicoJKBelum ada peringkat
- HA100 - SAP HANA Introduction (Col99)Dokumen363 halamanHA100 - SAP HANA Introduction (Col99)ramesh_rk0Belum ada peringkat
- Ieee SoftTITLES 2014 - 2015Dokumen34 halamanIeee SoftTITLES 2014 - 2015JKBelum ada peringkat
- System Testing Types and TechniquesDokumen5 halamanSystem Testing Types and TechniquesRambhupalReddyBelum ada peringkat
- Cs2351 Artificial Intelligence 16 MarksDokumen1 halamanCs2351 Artificial Intelligence 16 MarksSelvan Dinesh KumarBelum ada peringkat
- Aca QHDokumen12 halamanAca QHJKBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- MyX6 2 EnglishDokumen64 halamanMyX6 2 EnglishGheorghe MihalcoviciBelum ada peringkat
- 12-month warranty for RS10 air conditioner remote controlDokumen2 halaman12-month warranty for RS10 air conditioner remote controlMax PaytonBelum ada peringkat
- 12769HG-1Manual117 GrifosDokumen12 halaman12769HG-1Manual117 GrifosrodrigoarrepolBelum ada peringkat
- B-64304en-1 - 02 (Manual Del Operador Torno) PDFDokumen446 halamanB-64304en-1 - 02 (Manual Del Operador Torno) PDFIrineo Avalos MejiaBelum ada peringkat
- FTJ Series Product Guide PDFDokumen12 halamanFTJ Series Product Guide PDFJhon SendokBelum ada peringkat
- CS5000Dokumen47 halamanCS5000Mil RelBelum ada peringkat
- Fujitsu LiFEBOOK NH570 NOTEBOOKDokumen5 halamanFujitsu LiFEBOOK NH570 NOTEBOOKJo ZentBelum ada peringkat
- Respironics V60 Users Manual PDFDokumen160 halamanRespironics V60 Users Manual PDFEduardoBelum ada peringkat
- MiniMate ManualDokumen58 halamanMiniMate Manualalexandly100% (1)
- Chapter 19 Electrochemistry WorksheetDokumen4 halamanChapter 19 Electrochemistry WorksheetCerisse GabionBelum ada peringkat
- Optima Commercial Datasheet PDFDokumen6 halamanOptima Commercial Datasheet PDFAndreas EkaBelum ada peringkat
- Coe Document East 1011Dokumen37 halamanCoe Document East 1011Ihab El SawiBelum ada peringkat
- Electrochem Passivation of Primary Lithium CellsDokumen2 halamanElectrochem Passivation of Primary Lithium Cellsvongoctu2016Belum ada peringkat
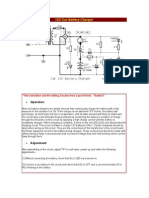
- 12V Car Battery ChargerDokumen2 halaman12V Car Battery ChargerbocahgmhBelum ada peringkat
- NSM 2 3 & NSB 6 Epair V3 0 PDFDokumen36 halamanNSM 2 3 & NSB 6 Epair V3 0 PDFjaved aliBelum ada peringkat
- Powerful lithium batteries for long runtimeDokumen4 halamanPowerful lithium batteries for long runtimevaseemalikhanBelum ada peringkat
- Conext XW Installation Guide PDFDokumen184 halamanConext XW Installation Guide PDFFrancisco BernalBelum ada peringkat
- O&m BW211 BW212Dokumen124 halamanO&m BW211 BW212Ricardo Portal70% (10)
- Specsheet - Prismatic Cell 3.2V52AhDokumen2 halamanSpecsheet - Prismatic Cell 3.2V52AhDeni TechBelum ada peringkat
- Battery Maintenance and Care PDFDokumen1 halamanBattery Maintenance and Care PDFEleAltındağBelum ada peringkat
- Instruction Manual English EmailDokumen180 halamanInstruction Manual English EmailZizo Awad100% (1)
- Project: C C With Real Human Pronouncing.: VoiceDokumen4 halamanProject: C C With Real Human Pronouncing.: VoiceAmarjith ValancheryBelum ada peringkat
- Satellite A105 S4384Dokumen11 halamanSatellite A105 S4384Manuel GalvisBelum ada peringkat
- Panasonic KX-TG3612 DECT Phone ManualDokumen32 halamanPanasonic KX-TG3612 DECT Phone Manualxlam99Belum ada peringkat
- Manual Jump Starter BDJS450Dokumen12 halamanManual Jump Starter BDJS450Ace LondaleBelum ada peringkat
- Requirements and types of useful batteriesDokumen8 halamanRequirements and types of useful batteriesJOSEPH HERBERT MABELBelum ada peringkat
- CAT4&Genny Brochure FDokumen8 halamanCAT4&Genny Brochure FVenkadesh PeriathambiBelum ada peringkat
- Eltek Valere - Ethernet Controller - Install Manual Telnet Feature - V1.0Dokumen22 halamanEltek Valere - Ethernet Controller - Install Manual Telnet Feature - V1.0JoseGarciaBelum ada peringkat
- Upneda Technical Specifications-Solar Street LightDokumen8 halamanUpneda Technical Specifications-Solar Street Lightjust_4_u_dear_in9549Belum ada peringkat