Anda mungkin juga menyukai
- 917S31 PDF SpaDokumen14 halaman917S31 PDF SpaLiliana Rosemary Aponte PérezBelum ada peringkat
- Libro Algoritmos PDFDokumen237 halamanLibro Algoritmos PDFGabriel Terán100% (2)
- Principios básicos de estática y programación aplicados a casos realesDari EverandPrincipios básicos de estática y programación aplicados a casos realesPenilaian: 5 dari 5 bintang5/5 (1)
- Robot BalancinDokumen29 halamanRobot BalancinBryan VargasBelum ada peringkat
- Dispositivos de Protección EléctricosDokumen4 halamanDispositivos de Protección EléctricosBryan AndresBelum ada peringkat
- Procedimiento para Realizar Un Análisis A Un Ensamble en SolidWorksDokumen21 halamanProcedimiento para Realizar Un Análisis A Un Ensamble en SolidWorksRamiro LopezBelum ada peringkat
- Informe-final-Introduccion A Los Metodos ComputacionalesDokumen12 halamanInforme-final-Introduccion A Los Metodos ComputacionalesEliana Tumialan MisariBelum ada peringkat
- Introducción a los Algoritmos y las Estructuras de Datos 3: Introducción a los Algoritmos y las Estructuras de Datos, #3Dari EverandIntroducción a los Algoritmos y las Estructuras de Datos 3: Introducción a los Algoritmos y las Estructuras de Datos, #3Belum ada peringkat
- Métodos Numéricos para Respuesta SísmicaDokumen19 halamanMétodos Numéricos para Respuesta SísmicajhairBelum ada peringkat
- LAB-01-GRUPO-02 (Final)Dokumen26 halamanLAB-01-GRUPO-02 (Final)Sergio Luis Paiva FrassinettiBelum ada peringkat
- Pia Diseño de Elementos de Maquinas 1830366Dokumen8 halamanPia Diseño de Elementos de Maquinas 1830366Luz CasillasBelum ada peringkat
- Proyecto Final Mecanismos Cierrapuertas PDFDokumen31 halamanProyecto Final Mecanismos Cierrapuertas PDFMaycool Jhon Haro LopezBelum ada peringkat
- T6U1 Delgado Manzano Marco NL05Dokumen14 halamanT6U1 Delgado Manzano Marco NL05Marco DelgadoBelum ada peringkat
- Aplicaciones Del CalculoDokumen8 halamanAplicaciones Del CalculoKristen SmithBelum ada peringkat
- Ut1 Introduccion ProgramacionDokumen10 halamanUt1 Introduccion ProgramacionIgnacioBelum ada peringkat
- Lab03-A - Uniones Resbaladizas - Mecanismos de Palancas-2-1Dokumen6 halamanLab03-A - Uniones Resbaladizas - Mecanismos de Palancas-2-1Steve ZMBelum ada peringkat
- Grupo 1 - Análisis de Tensiones - Turno MartesDokumen28 halamanGrupo 1 - Análisis de Tensiones - Turno MartesJordan YnfanteBelum ada peringkat
- Analisis de AlgoritmosDokumen8 halamanAnalisis de AlgoritmosDANIEL ALEJANDRO OSORIO CUEVASBelum ada peringkat
- Practica 5 Física Clásica MRU IPN ICE.Dokumen13 halamanPractica 5 Física Clásica MRU IPN ICE.Diego Alejandro Atlitec SarabiaBelum ada peringkat
- LabCinematica CarrilDokumen6 halamanLabCinematica CarrilJuan Camilo MartinezBelum ada peringkat
- Elementos Cualitativos de Diseño de ComputadorasDokumen41 halamanElementos Cualitativos de Diseño de ComputadorasjosegalavizcBelum ada peringkat
- PIA - DEM - Hoja de BulldozerDokumen26 halamanPIA - DEM - Hoja de BulldozerEl StrikerBelum ada peringkat
- Data Studio-Pasco-Informe 1Dokumen30 halamanData Studio-Pasco-Informe 1Parrucho Ecb50% (2)
- Deformacion en Viga CATIADokumen14 halamanDeformacion en Viga CATIASandra Madai Perales AnotaBelum ada peringkat
- Prototipo Grúa PórticoDokumen9 halamanPrototipo Grúa PórticoJames García PuellesBelum ada peringkat
- Informe Proyecto Final LpeDokumen60 halamanInforme Proyecto Final LpemilagrosguzveBelum ada peringkat
- Elementos FinitosDokumen98 halamanElementos FinitoscristobulBelum ada peringkat
- Metodo de Elemento Finito Unidad 1Dokumen14 halamanMetodo de Elemento Finito Unidad 1Giovanni GranadosBelum ada peringkat
- 506 - Deborah Beatriz Oropeza Romero - PIADokumen50 halaman506 - Deborah Beatriz Oropeza Romero - PIAJosé Eduardo SotoBelum ada peringkat
- CYPECAD Hormigón - ImprimibleDokumen165 halamanCYPECAD Hormigón - ImprimibleMiguel Cayuela de PedroBelum ada peringkat
- Practica 1 Cim Lab - Grupo de PracticaDokumen15 halamanPractica 1 Cim Lab - Grupo de PracticaJoel BarahonaBelum ada peringkat
- No 3 - Dinamica-Carril. 2021.01Dokumen6 halamanNo 3 - Dinamica-Carril. 2021.01Manuela Uribe CardonaBelum ada peringkat
- Fisica-I - FCNM 2014bDokumen95 halamanFisica-I - FCNM 2014bAndree Rosales100% (1)
- Elementos - Finitos - Plano - PiezaDokumen26 halamanElementos - Finitos - Plano - PiezaFrank Castro RBelum ada peringkat
- Informe Laboratorio FisicaDokumen21 halamanInforme Laboratorio FisicaJuan Carlos Barreto GarciaBelum ada peringkat
- Fundamentos de Algoritmia PDFDokumen9 halamanFundamentos de Algoritmia PDFJhon Soleto VargasBelum ada peringkat
- No 3 - Dinamica-Carril. 2021.01Dokumen6 halamanNo 3 - Dinamica-Carril. 2021.01Manuela Uribe CardonaBelum ada peringkat
- Huerta SH U3-1Dokumen5 halamanHuerta SH U3-1Carlos Alberto Juárez ArroyoBelum ada peringkat
- 4.9 Aplicación de SoftwareDokumen4 halaman4.9 Aplicación de SoftwareMarcos MartinezBelum ada peringkat
- Metodología de Programación Principios y Aplicaciones IncompletoDokumen25 halamanMetodología de Programación Principios y Aplicaciones IncompletokpagchaBelum ada peringkat
- Articulo de Investigacion de Maquina Dispensadora de Frutos SecosDokumen6 halamanArticulo de Investigacion de Maquina Dispensadora de Frutos SecosHenry Llanos GuevaraBelum ada peringkat
- Manual OrcadDokumen28 halamanManual Orcademg83mxBelum ada peringkat
- Manual Algoritmos 2018 - H. Caselli G.Dokumen96 halamanManual Algoritmos 2018 - H. Caselli G.mauti114Belum ada peringkat
- Apuntes Diaz CaroDokumen34 halamanApuntes Diaz CaroMichelFaradayBelum ada peringkat
- A1 Rodriguez Muñoz SarahiDokumen11 halamanA1 Rodriguez Muñoz Sarahijuan mezaBelum ada peringkat
- Ei 2Dokumen28 halamanEi 2carlossg01Belum ada peringkat
- Evidencia 1Dokumen12 halamanEvidencia 1Aurora AcostaBelum ada peringkat
- Actividad 2. Monitorear Un Sensor LDRDokumen11 halamanActividad 2. Monitorear Un Sensor LDREnrique ChanBelum ada peringkat
- Ensayo Sistemas Operativos Jonathan Gonzalez ReyesDokumen9 halamanEnsayo Sistemas Operativos Jonathan Gonzalez ReyesJonathan Gonzalez ReyesBelum ada peringkat
- P5 DSM 1827471Dokumen18 halamanP5 DSM 1827471Elan Gabriel Moreno SanchezBelum ada peringkat
- Entrega Final GatoDokumen25 halamanEntrega Final Gatoapi-301246238Belum ada peringkat
- Laboratorio N1Dokumen8 halamanLaboratorio N1Marco Antonio Valencia De la CruzBelum ada peringkat
- Reporte de Tesis Reduccion de Peso en Formula SaeDokumen2 halamanReporte de Tesis Reduccion de Peso en Formula SaeIvan FonsecaBelum ada peringkat
- Cordon de Soldadura Con INVENTORDokumen27 halamanCordon de Soldadura Con INVENTORGeorge Brandon HaparcoBelum ada peringkat
- Reporte Programas SecuencialesDokumen9 halamanReporte Programas SecuencialesAngel ManuelBelum ada peringkat
- Duoc Uc Escuela de Ingeniería, Valparaíso Control Automatico de Procesos Actividad RecuperativaDokumen14 halamanDuoc Uc Escuela de Ingeniería, Valparaíso Control Automatico de Procesos Actividad Recuperativamario rojasBelum ada peringkat
- Henry 100429011Dokumen5 halamanHenry 100429011Tony SanchezBelum ada peringkat
- BarajasOrozco FranciscoJavier8Dokumen10 halamanBarajasOrozco FranciscoJavier8lariza.ortega5360Belum ada peringkat
- Prografis 2Dokumen43 halamanPrografis 2Lennin GalvezBelum ada peringkat
- Práctica 7 (CCD, Ramirez)Dokumen8 halamanPráctica 7 (CCD, Ramirez)Carlos RamirezBelum ada peringkat
- Introducción a los Algoritmos y las Estructuras de Datos, 3: Aprender Estructuras de Datos Lineales con Videos y Preguntas de EntrevistasDari EverandIntroducción a los Algoritmos y las Estructuras de Datos, 3: Aprender Estructuras de Datos Lineales con Videos y Preguntas de EntrevistasBelum ada peringkat
- EstandarizacionDokumen71 halamanEstandarizacionMisael RiosBelum ada peringkat
- Ensayo Sobre Lectura de Karel KosikDokumen2 halamanEnsayo Sobre Lectura de Karel KosikFabiola VázquezBelum ada peringkat
- Herramientas de Corte para TornoDokumen5 halamanHerramientas de Corte para TornoFabiola VázquezBelum ada peringkat
- Calibrador Con Vernier y MicromDokumen7 halamanCalibrador Con Vernier y MicromFabiola VázquezBelum ada peringkat
- Probabi LidaDokumen18 halamanProbabi Lidaobliga100% (1)
- ORGANIGRAMASDokumen2 halamanORGANIGRAMASFabiola VázquezBelum ada peringkat
- Lab Manufactura 2 - FiDokumen10 halamanLab Manufactura 2 - FiFabiola Vázquez0% (1)
- Etapas de Formación de Viruta - ImprimirDokumen1 halamanEtapas de Formación de Viruta - ImprimirFabiola VázquezBelum ada peringkat
- Desarrollo Empresarial Programa de La AsignaturaDokumen1 halamanDesarrollo Empresarial Programa de La AsignaturaFabiola VázquezBelum ada peringkat
- Pasos para Realizar Un Ensayo PersonalDokumen15 halamanPasos para Realizar Un Ensayo PersonalFabiola VázquezBelum ada peringkat
- El Análisis Del Ciclo de VidaDokumen7 halamanEl Análisis Del Ciclo de VidaDaniela Ovallos SanguinoBelum ada peringkat
- Guia Construcción Citas Bibliográficas UNAM 2018-2Dokumen16 halamanGuia Construcción Citas Bibliográficas UNAM 2018-2Fabiola VázquezBelum ada peringkat
- Etapas de Formación de Viruta - ImprimirDokumen1 halamanEtapas de Formación de Viruta - ImprimirFabiola VázquezBelum ada peringkat
- Practica 1 Electrónica BásicaDokumen2 halamanPractica 1 Electrónica BásicaFabiola VázquezBelum ada peringkat
- Formulario Basico para La Transformada de LaplaceDokumen1 halamanFormulario Basico para La Transformada de LaplaceFabiola VázquezBelum ada peringkat
- Práctica 1 Pronosticos 2018-IIDokumen3 halamanPráctica 1 Pronosticos 2018-IIFabiola VázquezBelum ada peringkat
- Articulo Tec MatDokumen2 halamanArticulo Tec MatFabiola VázquezBelum ada peringkat
- La Responsabilidad Del IngenieroDokumen12 halamanLa Responsabilidad Del IngenieroFabiola VázquezBelum ada peringkat
- Jaula de FaradayDokumen1 halamanJaula de FaradayFabiola VázquezBelum ada peringkat
- DislocacionesDokumen4 halamanDislocacionesJorge O'neill MerinoBelum ada peringkat
- Practica 2 Laboratorio de Maquinas TermicasDokumen7 halamanPractica 2 Laboratorio de Maquinas TermicasFabiola VázquezBelum ada peringkat
- INSTRUMENTACIONDokumen7 halamanINSTRUMENTACIONFabiola VázquezBelum ada peringkat
- Foda PersonalDokumen36 halamanFoda PersonalCarlos LlanoBelum ada peringkat
- Ecuaciones Diferenciales HomogeneasDokumen14 halamanEcuaciones Diferenciales HomogeneasFabiola VázquezBelum ada peringkat
- Previo 8Dokumen2 halamanPrevio 8Fabiola VázquezBelum ada peringkat
- C Uestion A RiosDokumen6 halamanC Uestion A RiosFabiola VázquezBelum ada peringkat
- Cuestionario Previo de PRESIONESDokumen4 halamanCuestionario Previo de PRESIONESFabiola VázquezBelum ada peringkat
- Estudio Del TrabajoDokumen88 halamanEstudio Del TrabajoFabiola Vázquez100% (1)
- Costos de ProduccionDokumen6 halamanCostos de ProduccionFabiola VázquezBelum ada peringkat
- Examen Rodas - Unidad - PreDokumen2 halamanExamen Rodas - Unidad - PreLisandro Aldair Buleje AlejoBelum ada peringkat
- Evaluacion Final TecnologiaDokumen2 halamanEvaluacion Final TecnologiaVeronica Guzman CuellarBelum ada peringkat
- Desarrollo de Un Sistema de Reconocimiento Del Estado de Los Cultivos de Café en Tiempo Real Usando Redes Neuronales ArtificialesDokumen8 halamanDesarrollo de Un Sistema de Reconocimiento Del Estado de Los Cultivos de Café en Tiempo Real Usando Redes Neuronales ArtificialesArmando Uribe ChurtaBelum ada peringkat
- Manual Office Nivel IntermedioDokumen64 halamanManual Office Nivel IntermedioDalila Tenorio NuñezBelum ada peringkat
- Perfil Tipo VsDokumen5 halamanPerfil Tipo VsnataliaBelum ada peringkat
- Ada 2 Clasificacion Del Software Educativo 2Dokumen6 halamanAda 2 Clasificacion Del Software Educativo 2Adriana Mena TunBelum ada peringkat
- Proceso Automático para La Solicitud de Cita PreviaDokumen2 halamanProceso Automático para La Solicitud de Cita PreviayenyBelum ada peringkat
- Manual Del UsuarioDokumen30 halamanManual Del UsuariorubenBelum ada peringkat
- LP CU ConectoresDokumen33 halamanLP CU ConectoresSilvana AcostaBelum ada peringkat
- Tutorial-Epsilon-Aula VirtualDokumen9 halamanTutorial-Epsilon-Aula VirtualEzequiel RamosBelum ada peringkat
- Hoja de Referencia Rápida de ComandosDokumen3 halamanHoja de Referencia Rápida de ComandosRuthSanchBelum ada peringkat
- Mooc002 13306987SDokumen2 halamanMooc002 13306987SAgustín Ruiz MartínBelum ada peringkat
- TP5 Material DidacticoDokumen17 halamanTP5 Material Didacticovictoria ferreiraBelum ada peringkat
- Concepto de Función-ActividadesDokumen20 halamanConcepto de Función-ActividadesJanethCacuango0% (1)
- Equipos Automatizados en MicrobiologiaDokumen45 halamanEquipos Automatizados en MicrobiologiaRobert Caballero100% (3)
- Desarrollo-Conclusion-Bibliografía (Actualizado)Dokumen5 halamanDesarrollo-Conclusion-Bibliografía (Actualizado)Leonardo MontañezBelum ada peringkat
- Taller CondicionalesDokumen2 halamanTaller CondicionalesLIZ DAYANA ROJAS CORTESBelum ada peringkat
- Especificaciones Mobiliario y EquipamientoDokumen34 halamanEspecificaciones Mobiliario y EquipamientoJ Manuel Saire Espinoza100% (1)
- Valor Absoluto 14Dokumen5 halamanValor Absoluto 14Gebardo MessinaBelum ada peringkat
- PeopleSoftTecnologias9 2Dokumen32 halamanPeopleSoftTecnologias9 2Antonio HuertaBelum ada peringkat
- Glosario PDFDokumen201 halamanGlosario PDFCarmenBelum ada peringkat
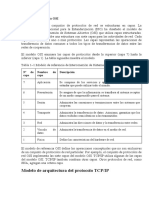
- Modelo de Referencia OSIDokumen7 halamanModelo de Referencia OSIDeleresiSanIsidroBelum ada peringkat
- Las 17 Fórmulas de Excel Esenciales para Empezar y Aprender Fórmulas de ExcelDokumen10 halamanLas 17 Fórmulas de Excel Esenciales para Empezar y Aprender Fórmulas de ExcelPablo HerreraBelum ada peringkat
- CVV U1 A3 AursDokumen3 halamanCVV U1 A3 AursAurelio Ruiz SalazarBelum ada peringkat
- Revision de Fuente de PoderDokumen3 halamanRevision de Fuente de PoderrogellopezBelum ada peringkat
- Scopus Mayor Navegador AcademicoDokumen6 halamanScopus Mayor Navegador AcademicoLuis Fernando Bermeo AlvarezBelum ada peringkat
- Uso de Herramientas de Citas y Referencias Bibliograficas en MSWordDokumen25 halamanUso de Herramientas de Citas y Referencias Bibliograficas en MSWordDayanna MéndezBelum ada peringkat
- Ficha 2Dokumen45 halamanFicha 2JoseKaztilloBelum ada peringkat