Anda mungkin juga menyukai
- Simulink ®Dokumen92 halamanSimulink ®RumeshBelum ada peringkat
- MATLAB SimulinkDokumen89 halamanMATLAB SimulinkMoorthi Velu88% (16)
- Getting Started Guide: SimulinkDokumen93 halamanGetting Started Guide: SimulinkJ. M. M.Belum ada peringkat
- Tutorial Simulink PDFDokumen92 halamanTutorial Simulink PDFMisael Fernando Perilla BenitezBelum ada peringkat
- sl_gettingstart-convertedDokumen91 halamansl_gettingstart-convertedThành PhúcBelum ada peringkat
- Getting Started SimuLinkDokumen92 halamanGetting Started SimuLinkamacuro100% (1)
- Simulink Starting GuideDokumen89 halamanSimulink Starting GuideJorgeCisnerosGallegosBelum ada peringkat
- Matlab y SimulinkDokumen86 halamanMatlab y SimulinkGabyReyesValdezBelum ada peringkat
- Simulink - Get StartDokumen62 halamanSimulink - Get Startعبدالله جمالBelum ada peringkat
- Manual SimeventDokumen117 halamanManual SimeventAryo Daniel100% (1)
- Simulink PLC Coder 1Dokumen103 halamanSimulink PLC Coder 1sorzomBelum ada peringkat
- Simulink For DSPDokumen112 halamanSimulink For DSPSpin FotonioBelum ada peringkat
- MATLAB SIMSCAPE ManualDokumen153 halamanMATLAB SIMSCAPE Manualionpana100% (1)
- Get Start CSDokumen278 halamanGet Start CSAnjireddy ThatiparthyBelum ada peringkat
- Signal Processing Blockset - For Use With SimulinkDokumen129 halamanSignal Processing Blockset - For Use With SimulinkengshimaaBelum ada peringkat
- Win RealTime TRGTDokumen145 halamanWin RealTime TRGTGirish K GiriBelum ada peringkat
- Realtime Workshop Embedded Coder 5Dokumen1.074 halamanRealtime Workshop Embedded Coder 5cointoinBelum ada peringkat
- Data Acquisition Toolbox Adaptor Kit User's GuideDokumen218 halamanData Acquisition Toolbox Adaptor Kit User's GuideWilliam H. CoralBelum ada peringkat
- Getting Started Guide: Model Predictive Control Toolbox™ 3Dokumen142 halamanGetting Started Guide: Model Predictive Control Toolbox™ 3d-fbuser-91931741Belum ada peringkat
- Matlab 2012aDokumen278 halamanMatlab 2012aAnakin PatojoBelum ada peringkat
- SimMechanics 2nd Generation Introduction ExampleDokumen40 halamanSimMechanics 2nd Generation Introduction ExampleStefan Spasic100% (2)
- Image Acquisition Toolbox Adaptor Kit 1Dokumen169 halamanImage Acquisition Toolbox Adaptor Kit 1Anonymous TVDaNPeBelum ada peringkat
- User'S Guide: Simelectronics 1Dokumen83 halamanUser'S Guide: Simelectronics 1Gabriel Aparecido FonsecaBelum ada peringkat
- Parallel Computing Toolbox™UserGuideDokumen729 halamanParallel Computing Toolbox™UserGuideakbertherockBelum ada peringkat
- Rtwin Target Ug PDFDokumen178 halamanRtwin Target Ug PDFMarco RodríguezBelum ada peringkat
- Database Toolbox: User's GuideDokumen226 halamanDatabase Toolbox: User's GuideAmita Rathee DahiyaBelum ada peringkat
- DSP System Toolbox™ Getting Started GuideDokumen91 halamanDSP System Toolbox™ Getting Started GuideKhai HuynhBelum ada peringkat
- Arena Template Developer's GuideDokumen286 halamanArena Template Developer's Guidejhonny_otiBelum ada peringkat
- Simulink Design Optimization - Getting Started GuideDokumen225 halamanSimulink Design Optimization - Getting Started GuideAnonymous DgWkoyXPABelum ada peringkat
- Embedded Coder - Getting Started GuideDokumen123 halamanEmbedded Coder - Getting Started GuideAngamuthu AnanthBelum ada peringkat
- Matlab ParallelDokumen617 halamanMatlab Parallelphsieh007Belum ada peringkat
- Template Developer's Guide PDFDokumen295 halamanTemplate Developer's Guide PDFMariangeles XitumulBelum ada peringkat
- Report Generator User GuideDokumen1.348 halamanReport Generator User GuideVivaCharlesBelum ada peringkat
- Simscape UgDokumen886 halamanSimscape Ugfarhan rajibBelum ada peringkat
- MATLAB Coder Users Guide PDFDokumen318 halamanMATLAB Coder Users Guide PDFPedro LarreaBelum ada peringkat
- Simulink 3d AnimationDokumen496 halamanSimulink 3d Animationmuhammad_sarwar_27100% (2)
- Maab GuidelinesDokumen315 halamanMaab GuidelinesVikas Patel100% (1)
- Simscape Guide PDFDokumen426 halamanSimscape Guide PDFkanuni41Belum ada peringkat
- SSM10 Administrator's GuideDokumen62 halamanSSM10 Administrator's GuideNeil LirussoBelum ada peringkat
- Getting StartedDokumen164 halamanGetting StartedManikanda SubramanianBelum ada peringkat
- Computer Vision System Toolbox Getting Started GuideDokumen68 halamanComputer Vision System Toolbox Getting Started GuideKjfsa TuBelum ada peringkat
- Data - Analysis Using MatlabDokumen156 halamanData - Analysis Using MatlabAnshik BansalBelum ada peringkat
- Simscape UgDokumen292 halamanSimscape UgWaqas ChBelum ada peringkat
- Simscape UgDokumen970 halamanSimscape UgWeiBelum ada peringkat
- PFManual 14 1 EN Ed1 Vol I PDFDokumen446 halamanPFManual 14 1 EN Ed1 Vol I PDFedvinluisBelum ada peringkat
- Simscape™ User's GuideDokumen279 halamanSimscape™ User's GuideVictor Colpo NavarreteBelum ada peringkat
- Femap Getting StartedDokumen148 halamanFemap Getting StartedMSC Nastran BeginnerBelum ada peringkat
- Pe SSDokumen508 halamanPe SSShalini KosuriBelum ada peringkat
- Team Development GuideDokumen122 halamanTeam Development GuideCường Văn VươngBelum ada peringkat
- Matalb 2015aDokumen296 halamanMatalb 2015aNishant ManepalliBelum ada peringkat
- MATLAB R2014 Coder Getting Started GuideDokumen60 halamanMATLAB R2014 Coder Getting Started GuideqinshaoqBelum ada peringkat
- Simscape GsDokumen32 halamanSimscape GsNino QyBelum ada peringkat
- Pipephase 9.1 Netopt User's GuideDokumen134 halamanPipephase 9.1 Netopt User's GuideSAKURAIZENBelum ada peringkat
- Programming the Photon: Getting Started with the Internet of ThingsDari EverandProgramming the Photon: Getting Started with the Internet of ThingsPenilaian: 5 dari 5 bintang5/5 (1)
- Matlba S FunctionDokumen889 halamanMatlba S Functionmsartini78442Belum ada peringkat
- Scriptingmaxwell OnlinehelpDokumen364 halamanScriptingmaxwell OnlinehelpIrina AtudoreiBelum ada peringkat
- Microsoft Virtualization: Master Microsoft Server, Desktop, Application, and Presentation VirtualizationDari EverandMicrosoft Virtualization: Master Microsoft Server, Desktop, Application, and Presentation VirtualizationPenilaian: 4 dari 5 bintang4/5 (2)
- OCP Oracle Database 11g Administration II Exam Guide: Exam 1Z0-053Dari EverandOCP Oracle Database 11g Administration II Exam Guide: Exam 1Z0-053Belum ada peringkat
- Microsoft Windows Server 2008 R2 Administrator's Reference: The Administrator's Essential ReferenceDari EverandMicrosoft Windows Server 2008 R2 Administrator's Reference: The Administrator's Essential ReferencePenilaian: 4.5 dari 5 bintang4.5/5 (3)
- PAPERDokumen5 halamanPAPERRizky DsBelum ada peringkat
- 1.1. Purpose: Something HereDokumen7 halaman1.1. Purpose: Something HereRizky DsBelum ada peringkat
- Assignment 1 - System Engineering - Neural Network Based Path Planning For Mecanum Wheeled Omni Directional RobotDokumen12 halamanAssignment 1 - System Engineering - Neural Network Based Path Planning For Mecanum Wheeled Omni Directional RobotRizky DsBelum ada peringkat
- Modelling Electromagnetic Suspension Force Using Measured Inductance-Airgap DataDokumen4 halamanModelling Electromagnetic Suspension Force Using Measured Inductance-Airgap DataRizky DsBelum ada peringkat
- 56789Dokumen23 halaman56789Rizky DsBelum ada peringkat
- Thesis Mochammad Rizky DiprasetyaDokumen125 halamanThesis Mochammad Rizky DiprasetyaRizky DsBelum ada peringkat
- COS 495 - Lecture 5 Autonomous Robot Navigation: Instructor: Chris Clark Semester: Fall 2011Dokumen30 halamanCOS 495 - Lecture 5 Autonomous Robot Navigation: Instructor: Chris Clark Semester: Fall 2011flv_91Belum ada peringkat
- Suspension System: Presented By: Enzo Oestanto Mochammad Rizky DiprasetyaDokumen10 halamanSuspension System: Presented By: Enzo Oestanto Mochammad Rizky DiprasetyaRizky DsBelum ada peringkat
- Teamviewer ManualDokumen76 halamanTeamviewer ManualRehab WahshBelum ada peringkat
- Managing Microcontroller ProjectsDokumen78 halamanManaging Microcontroller ProjectsRizky DsBelum ada peringkat
- Alginate: Anionic Polysaccharide Cell Walls Brown Algae GumDokumen1 halamanAlginate: Anionic Polysaccharide Cell Walls Brown Algae GumRizky DsBelum ada peringkat
- Modelling Electromagnetic Suspension Force Using Measured Inductance-Airgap DataDokumen4 halamanModelling Electromagnetic Suspension Force Using Measured Inductance-Airgap DataRizky DsBelum ada peringkat
- Thesis Prototype SOP v1Dokumen1 halamanThesis Prototype SOP v1Rizky DsBelum ada peringkat
- Uni SushiDokumen2 halamanUni SushiRizky DsBelum ada peringkat
- Exp 5 - AspirinF11Dokumen5 halamanExp 5 - AspirinF11Rizky DsBelum ada peringkat
- Tugas Eleng JumatDokumen7 halamanTugas Eleng JumatRizky DsBelum ada peringkat
- MicroC2 eCh09L05AssemProgTimersDokumen32 halamanMicroC2 eCh09L05AssemProgTimersRizky DsBelum ada peringkat
- The Flight of The BumblebeeDokumen2 halamanThe Flight of The BumblebeeEmanuele Bracchi100% (1)
- Beer Production Process and Health EffectsDokumen13 halamanBeer Production Process and Health EffectsRizky DsBelum ada peringkat
- FXCM Micro New To Forex GuideDokumen27 halamanFXCM Micro New To Forex GuideRizky DsBelum ada peringkat
- Lirik Run Devil RunDokumen2 halamanLirik Run Devil RunRizky DsBelum ada peringkat
- Physics 2 (MT) - Quiz 1a - SolutionDokumen5 halamanPhysics 2 (MT) - Quiz 1a - SolutionRizky DsBelum ada peringkat
- BLUE TOMORROW – SUPER JUNIOR MDokumen2 halamanBLUE TOMORROW – SUPER JUNIOR MRizky DsBelum ada peringkat
- Lecture05 - Electric Current and DC CircuitDokumen31 halamanLecture05 - Electric Current and DC CircuitRizky DsBelum ada peringkat
- Biogas Calculator TemplateDokumen27 halamanBiogas Calculator TemplateAlex Julian-CooperBelum ada peringkat
- Staircase Preliminary Design Based On NBC and IS CodeDokumen10 halamanStaircase Preliminary Design Based On NBC and IS CodeEducation. HubBelum ada peringkat
- Ice-Lined Refrigerator ManualDokumen8 halamanIce-Lined Refrigerator ManualEmilioPerezBallesterosBelum ada peringkat
- Technical Presentation - Arik Ethan Kinajil (25231)Dokumen5 halamanTechnical Presentation - Arik Ethan Kinajil (25231)Arik EthanBelum ada peringkat
- As 4123.4-2008 Mobile Waste Containers Containers With Four Wheels With A Capacity From 750 L To 1700 L WithDokumen7 halamanAs 4123.4-2008 Mobile Waste Containers Containers With Four Wheels With A Capacity From 750 L To 1700 L WithSAI Global - APACBelum ada peringkat
- CFS50 motor feedback installation instructionsDokumen1 halamanCFS50 motor feedback installation instructionsJavier AlzateBelum ada peringkat
- Structural Systems Engineering GuideDokumen67 halamanStructural Systems Engineering Guidejucar fernandezBelum ada peringkat
- Civil DEMOLITION OF BUILDINGDokumen12 halamanCivil DEMOLITION OF BUILDINGShaik Abdul RaheemBelum ada peringkat
- Lec 958975Dokumen19 halamanLec 958975Rajasekar PichaimuthuBelum ada peringkat
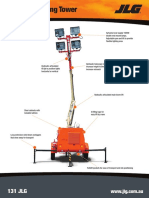
- JLG Lighting Tower 6308AN Series II 20150907Dokumen2 halamanJLG Lighting Tower 6308AN Series II 20150907DwiSulistyo09Belum ada peringkat
- 3.17. Creep EquationsDokumen10 halaman3.17. Creep Equationsruchit solankiBelum ada peringkat
- Ea80 Series PDFDokumen82 halamanEa80 Series PDFAnca MunteanuBelum ada peringkat
- The Synergies of Hybridizing CNC and Additive ManufacturingDokumen8 halamanThe Synergies of Hybridizing CNC and Additive ManufacturingdemuxBelum ada peringkat
- Fosroc Conbextra EP10: Constructive SolutionsDokumen2 halamanFosroc Conbextra EP10: Constructive SolutionsVincent JavateBelum ada peringkat
- 3 Phase Induction Motors Objective Questions With AnswersDokumen3 halaman3 Phase Induction Motors Objective Questions With AnswersMohan Raj0% (2)
- Composite Repair PDFDokumen13 halamanComposite Repair PDFNarendra PalandeBelum ada peringkat
- Linear Slot DiffuserDokumen15 halamanLinear Slot DiffuserhyderabadBelum ada peringkat
- Applied Fluid Mechanics: Viscosity of FluidsDokumen22 halamanApplied Fluid Mechanics: Viscosity of FluidsMaggie HepditchBelum ada peringkat
- Hydraulic Mining Shovel 6040AC: 08. Attachment Functions - FSDokumen20 halamanHydraulic Mining Shovel 6040AC: 08. Attachment Functions - FShector50% (2)
- A320 Aircraft CharacteristicsDokumen387 halamanA320 Aircraft CharacteristicsEder LucianoBelum ada peringkat
- 06 HVAC Plumbing PDFDokumen727 halaman06 HVAC Plumbing PDFTamBelum ada peringkat
- Generation of Electrical Energy - B. R. GuptaDokumen171 halamanGeneration of Electrical Energy - B. R. GuptaIbrahim Ahmed43% (23)
- Supercharging: Superchargers & TurbochargersDokumen11 halamanSupercharging: Superchargers & TurbochargersAkhil Here100% (1)
- Welding PositionDokumen30 halamanWelding PositionTuah Negeri100% (1)
- 1986 Lobel RobinsonDokumen18 halaman1986 Lobel RobinsonNathallia SalvadorBelum ada peringkat
- NDI Manual 2013 - v10Dokumen13 halamanNDI Manual 2013 - v10Yudha Bhakti NugrahaBelum ada peringkat
- CAD1 AssignmentDokumen11 halamanCAD1 AssignmentJohn2jBelum ada peringkat
- Townsend DischargeDokumen6 halamanTownsend DischargeGordon DuffBelum ada peringkat
- Motorola's TQM Journey to Six Sigma QualityDokumen19 halamanMotorola's TQM Journey to Six Sigma QualityKatya Avdieienko100% (1)
- 01chapter 5-1Dokumen55 halaman01chapter 5-1AhmBelum ada peringkat