Monitoramento de Carga em Caminhoes de Coleta e Compactacao de Lixo Domiciliar - Sistema Supervisorio - Jose Ricardo Da Cruz, Ebenezer Xavier Dos Reis, Christian Matsugane Dantas Yogi
Diunggah oleh
Ebenezer Xavier Dos ReisJudul Asli
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Monitoramento de Carga em Caminhoes de Coleta e Compactacao de Lixo Domiciliar - Sistema Supervisorio - Jose Ricardo Da Cruz, Ebenezer Xavier Dos Reis, Christian Matsugane Dantas Yogi
Diunggah oleh
Ebenezer Xavier Dos ReisHak Cipta:
Format Tersedia
FACULDADE ANHANGUERA DE BELO HORIZONTE
JOS RICARDO DA CRUZ
EBENEZER XAVIER DOS REIS
CHRISTIAN MATSUGANE DANTAS YOGI
MONITORAMENTO DE CARGA EM CAMINHES DE COLETA E
COMPACTAO DE LIXO DOMICILIAR:
SISTEMA SUPERVISRIO DE CARGA
BELO HORIZONTE
2014
FACULDADE ANHANGUERA DE BELO HORIZONTE
JOS RICARDO DA CRUZ
EBENEZER XAVIER DOS REIS
CHRISTIAN MATSUGANE DANTAS YOGI
MONITORAMENTO DE CARGA EM CAMINHES DE COLETA E
COMPACTAO DE LIXO DOMICILIAR:
SISTEMA SUPERVISRIO DE CARGA
Trabalho
de
Concluso
de
Curso
apresentado banca examinadora da
Faculdade
Horizonte,
Anhanguera
de
Belo
como requisito parcial
obteno do grau de Bacharel em
Sistemas
de
Informao
sob
orientao do professor Mestre Efrem
Lousada.
BELO HORIZONTE
2014
JOS RCARDO DA CRUZ
EBENEZER XAVIER DOS REIS
CHRISTIAN MATSUGANE DANTAS YOGI
MONITORAMENTO DE CARGA EM CAMINHES DE COLETA E
COMPACTAO DE LIXO DOMICILIAR:
SISTEMA SUPERVISRIO DE CARGA
Trabalho
de
Concluso
de
Curso
apresentado banca examinadora da
Faculdade
Horizonte,
Anhanguera
de
Belo
como requisito parcial
obteno do grau de Bacharel em
Sistemas
de
Informao
sob
orientao do professor Mestre Efrem
Lousada.
Aprovada em__de___de:_____
BANCA EXAMINADORA
___________________________________
Prof. Dr.
Anhanguera Educacional Ltda
___________________________________
Prof. Dr.
Anhanguera Educacional Ltda
___________________________________
Prof. Dr.
Anhanguera Educacional Ltda
Faculdade Anhanguera de Belo Horizonte
DEDICATRIA
A minha famlia, amigos e professores.
AGRADECIMENTOS
Agradeo a Deus por me dar foras para
continuar seguindo sempre em frente, aos
meus pais e professores por me mostrar
que tudo possvel nesta vida atravs de
esforo e dedicao.
RESUMO
Visando a melhoria na qualidade dos servios prestados pela Superintendncia de
Limpeza Urbana (SLU) da cidade de Belo Horizonte (BH) que possui caminhes
compactadores de lixo percorrendo diariamente as vias do municpio, este trabalho
apresenta uma soluo para amenizar os impactos causados nas vias urbanas por
esses veculos, atravs de sensores de peso instalados no caminho, que
comunicaro com um aparelho acoplado ao painel, informando o quanto de peso
este veculo est adquirindo, para que este no ultrapasse o limite de peso por eixo
estabelecido pelo Cdigo de Trnsito Brasileiro (CBT).
Palavras chaves: Caminhes compactadores de lixo. Peso por eixo. Sensores.
ABSTRACT
Aiming at improving the quality of services provided by the Superintendent of Street
Cleaning (SLU) City of Belo Horizonte (BH) having compactor garbage trucks
traveling daily on the roads of the city, this paper presents a solution to mitigate the
impacts of urban roads for these vehicle through weight sensors installed in the truck,
which reported to the panel coupled with a device that indicates how much weight
this vehicle is acquiring, so that it does not exceed the weight limit per axle set by
code Brazilian Transit (CBT).
Keywords: Compactor garbage trucks. Weight per axle. Sensors.
LISTA DE TABELAS
Tabela 1 - Peso mximo por eixo ................................................................................... 16
LISTA DE FIGURAS
Figura 1- Sistema SCADA de monitoramento de presso da gua .......................... 17
Figura 2 - Microcontrolador Atmel AVR .................................................................... 19
Figura 3 - Sensor de fora resistivo .......................................................................... 22
Figura 4 - Grfico de Resistncia x Fora ................................................................ 23
Figura 5 - Placa Arduino ........................................................................................... 24
Figura 6 - Interface IDE Arduino ............................................................................... 25
Figura 7 - Protoboard................................................................................................ 26
Figura 8 - Cabo Jumper ............................................................................................ 27
Figura 9 - Esquema de montagem do sistema supervisrio ..................................... 28
Figura 10 - Caso de Uso do Supervisrio ................................................................. 29
Figura 11 - Diagrama de Atividade do Supervisrio ................................................. 31
Figura 12- Cabealhos e definies...................................................................................32
Figura 13 - Funes utilizadas no aplicativo ............................................................. 33
Figura 14 - Variveis do sistema .............................................................................. 34
Figura 15 - Principais funes do sistema ................................................................ 35
Figura 16 - Sesso do cdigo que controla o sensor ............................................... 36
Figura 17 - Controle do comportamento dos LEDs .................................................. 37
Figura 18 - Funes de controle do LCD .................................................................. 38
Figura 19 - Teste realizado sem aplicao de fora mecnica ................................. 39
Figura 20 - Teste realizado aplicando 5 Kgf no FSR ................................................ 40
Figura 21 - Teste realizado aplicando 10 Kgf no FSR .............................................. 41
Figura 22 - Interface Supervisrio ............................................................................ 42
LISTA DE QUADROS
Quadro 1 - Descrio de Atores e Casos de uso ..................................................... 30
Quadro 2 - Descrio diagrama de atividade ........................................................... 32
LISTA DE SIGLAS E ABREVIAES
BH
Belo Horizonte
CBT
Cdigo de Trnsito Brasileiro
CI
Circuito Integrado
CPU
Unidade Central de Processamento
DENATRAN
Departamento Nacional de Trnsito
EEPROM
Electrically-Erasable Programmable Read-Only Memory
EPROM
Erasable Programmable Read-only Memory
FSR
Force Sensing Resistors
IDE
Integrated Development Environment
Intel
Integrated Eletronics
LCD
Liquid Crystal Display
LED
Light-Emitting Diode
mA
Milliampere
MCU
Micro Crontroller Unit
PBT
Peso Bruto Total
PIC
Programmable Intelligent Computer
PROM
Programable Read Only Memory
RAM
Random Access Memories
RISC
Reduced Instruction Set Computing
SCADA
Supervisory Controland Data Aquisition
SLU
Superintendncia de Limpeza Urbana
TV
Televiso
USB
Universal Serial Bus
SUMRIO
1 INTRODUO ....................................................................................................... 13
1.1 Motivao ........................................................................................................ 13
1.2 Justificativa ...................................................................................................... 13
1.3 Objetivo geral ................................................................................................... 14
1.4 Objetivos especficos ....................................................................................... 14
1.5 Estruturas do trabalho...................................................................................... 14
2 REFERENCIAL TERICO ..................................................................................... 15
2.1Cdigo de trnsito Brasileiro ............................................................................. 15
2.2 Superintendncia de limpeza urbana............................................................... 16
2.3 Sistemas Supervisrios ................................................................................... 17
2.4 Microcontroladores .......................................................................................... 18
2.4.1 O que so microcontroladores .................................................................. 18
2.4.2 Microcontrolador Atmel AVR ..................................................................... 18
2.5 Sensores.......................................................................................................... 19
2.5.1 Transdutores ............................................................................................. 20
2.5.2 Clulas de carga ....................................................................................... 21
2.5.3 Sensor de fora resistivo ........................................................................... 21
2.6 Dispositivos para Prototipagem ....................................................................... 23
2.6.1 Plataforma Arduino.................................................................................... 23
2.7 Protoboard ....................................................................................................... 26
2.7.1 Cabo Jumper ............................................................................................. 27
3 DESENVOLVIMENTO DO PROTTIPO ............................................................... 28
3.1 Montagem ........................................................................................................ 28
3.2 Diagrama de caso de uso ................................................................................ 29
3.3 Diagrama de atividade ..................................................................................... 30
3.4 Cdigo fonte .................................................................................................... 32
3.5 Monitoramento em tempo real ......................................................................... 39
3.5.1 Testes ....................................................................................................... 39
4 CONCLUSO ......................................................................................................... 43
5 REFERNCIAS BIBLIOGRFICAS ....................................................................... 44
13
1 INTRODUO
1.1 Motivao
O trnsito da cidade de Belo Horizonte (BH) vem sofrendo com
congestionamentos devido ao crescente nmero de veculos circulando diariamente
nos principais corredores de trnsito. So veculos particulares, veculos de entrega
de mercadorias, veculos de utilidade, pblica como os de transporte coletivo, txis,
ambulncias, viaturas de autoridades policiais e os caminhes de coleta de resduos
domiciliares. Segundo Alves (2013), a cidade conta hoje com cerca de 1.52 milhes
de carros, essa cifra correspondente a um perodo de dez anos, que de 2002 a
2012, acumulou em 105% de acordo com os ltimos dados divulgados pelo
Departamento Nacional de Trnsito (DENATRAN) em 2012.
Atualmente, as operaes de coleta e descarga de resduos do municpio de
BH so feitas, de maneira que, s se sabe a quantidade de carga transportada, no
aterro sanitrio, onde h uma balana para pesagem dos veculos. O condutor do
veculo usa de inferncia para calcular o peso aproximado que est transportando. O
impacto gerado por essa deficincia na medio dos resduos coletados provoca,
alm de danos diretos pista de rodagem, pelo peso excessivo, tambm causa
danos ambientais, pela quantidade de particulados provenientes da descarga do
escapamento do veculo, bem como, maior gasto com combustvel e manuteno
veicular. Alm de prejudicar a fluidez do trnsito quando o caminho de coleta
precisa fazer novas viagens para completar sua cota diria.
1.2 Justificativa
O interesse por esse tema surgiu da necessidade de resolver o problema
relacionado ao uso mais racional dos servios de coleta de lixo domiciliar por meio
de caminhes de coleta e compactao de lixo. Tendo em vista que qualquer
companhia deseja o mximo de eficincia na execuo de seus servios e a
diminuio de seus custos operacionais, o trabalho proposto visa apresentar uma
soluo de monitoramento na operao da coleta de lixo.
14
1.3 Objetivo geral
Permitir que os condutores dos veculos de coleta urbana monitorem em
tempo real a carga dos caminhes que trafegam pelas vias do permetro urbano,
dentro dos parmetros exigidos pelo Cdigo de Trnsito Brasileiro (CTB), diminuindo
assim, o impacto que causam ao meio ambiente e infraestrutura da cidade.
1.4 Objetivos especficos
Atualmente os caminhes do tipo coletor compactador em funcionamento no
municpio, no possuem nenhum tipo de dispositivo capaz de informar ao operador a
quantidade de carga que est coletando. A instalao desse dispositivo permitir
que cada caminho com uma determinada rota de coleta, faa sua cota mdia diria
de massa coletada, sem ultrapassar o limite de peso permitido. O dispositivo permite
ao condutor do caminho tomar decises que aperfeioem o seu trabalho, evitar
viagens desbalanceadas, idas e vindas desnecessrias ao aterro sanitrio.
1.5 Estruturas do trabalho
Este trabalho encontra-se organizado em quatro captulos: o captulo 2
apresenta o cenrio e as tecnologias relevantes para a soluo do problema
proposto. O captulo 3 apresenta a montagem do prottipo e o desenvolvimento do
sistema utilizado pelo dispositivo. O captulo 4 apresenta as concluses e trabalhos
futuros.
15
2 REFERENCIAL TERICO
Neste captulo so apresentadas as bases tericas nas quais o trabalho foi
fundamentado. Na seo 2.1 discorremos sobre a legislao em vigor. J em 2.2,
apresentamos o rgo pblico que cuida da limpeza e destinao dos resduos
domiciliares. Em 2.3 um panorama dos supervisrios. Em 2.4 microcontroladores,
2.5 sensores, 2.6 dispositivos para prototipagem e 2.7 protoboard.
2.1 Cdigo de Trnsito Brasileiro
O Cdigo de Trnsito Brasileiro (CTB) estabelece limites legais de peso para
os veculos de carga que transitam nas vias terrestres brasileiras, para o estudo que
estamos realizando ser dada nfase aos caminhes compactadores de lixo que
circulam nas vias dos bairros da cidade de Belo Horizonte - Minas Gerais. Sendo
assim o Conselho Nacional de Trnsito (CONTRAN), atravs das Resolues n
12/98, 184/05 e n 62/98, regulamentou os artigos 99 e 100 do CTB, nos quais
constam os limites para dimenses, Peso Bruto Total (PBT) e peso por eixo, que
devem ser observados para todos os veculos de carga que circulam nas vias
terrestres conforme a figura 1. A lei 7.408/85 determinou que fosse atribuda uma
tolerncia de 5% ao limite de 45.000 kg para o PBT, passando o limite para a
autuao para 47.250 kg.
Atravs da Resoluo n 104 de 21/12/99, o CONTRAN alterou a tolerncia
para o excesso de peso por eixo de 5% para 7,5%. As dimenses mximas
extradas da Resoluo n 12/98 artigo 1 so: Largura: 2,60 m; Altura: 4,40 m;
Comprimento total: veculo simples: 14,0 m.
16
A tabela 1 mostra a quantidade de peso mximo por eixo em diversos tipos
de veculos de acordo com Lei. 7.408/85.
Tabela 1 - Peso mximo por eixo
Fonte: Pgina Eixos no ANTT1
2.2 Superintendncia de Limpeza Urbana
A Superintendncia de Limpeza Urbana (SLU) a autarquia municipal
responsvel pela elaborao, controle e execuo de programas e atividades
voltados para a limpeza urbana de BH. Criada em 1973, a SLU presta servios de
coleta domiciliar de lixo, varrio, capina, aterramento de resduos, coleta seletiva,
reciclagem de entulho e compostagem, entre outros. A limpeza urbana traz reflexos
diretos para a sade pblica e para a preservao do meio ambiente. A coleta de
resduos slidos domiciliares, ou coleta domiciliar, consiste na atividade regular de
coleta e transporte de resduos slidos gerados em edificaes residenciais,
comerciais, pblicas e de prestaes de servios.
Essa atividade gerenciada pela Prefeitura de forma descentralizada, por
meio das nove Sees de Operao da SLU. O servio de coleta domiciliar porta a
porta abrange cerca de 93% da extenso das vias formalmente urbanizadas e 72%
da extenso das vias das vilas, favelas e conjuntos habitacionais, contemplando
95% da populao de Belo Horizonte. Mdia diria de lixo gerado em Belo
Disponvel em: <http://www.antt.gov.br > Acesso em Julho. 2014.
17
Horizonte. Em Belo Horizontes so coletados por dia cerca de 3.700 toneladas de
lixo (PBH, 2012).
2.3 Sistemas Supervisrios
Segundo SILVA (2004) os sistemas supervisrios permitem que sejam
monitoradas e rastreadas informaes de um processo produtivo ou instalao
fsica. Tais informaes so coletadas atravs de equipamentos de aquisio de
dados e, em seguida, manipuladas, analisadas, armazenadas e posteriormente,
apresentadas ao usurio. Estes sistemas tambm so chamados de Supervisory
Controland Data Aquisition (SCADA).
A figura 1 mostra um exemplo de um sistema supervisrio, SP-1coleta os
dados de presso, o SCADA monitora em tempo real e armazena os dados
coletados no servidor.
Figura 1- Sistema SCADA de monitoramento de presso da gua
Fonte: Prprio
Atravs dos sistemas supervisrios possvel fazer uma anlise das
informaes coletadas e armazenadas no banco dados, isso possibilita identificar
falhas e aperfeioar as tomadas de deciso. O monitoramento feito tempo real.
18
2.4 Microcontroladores
Nessa seo, so descritos microcontroladores de uma forma geral e mais
especificamente o microcontrolador AVR Atmel usado neste trabalho.
2.4.1 O que so microcontroladores
Os Microcontrollers (MCU) so um sistema computacional completo, pois
podem ser programados com funes especificas de acordo com cada
desenvolvedor. Podem ser utilizados, por exemplo, para tarefas simples, como
controlar a intensidade luminosa de um Light-Emitting Diode (LED) ou fazer com que
o display de um relgio funcione como so utilizados para controlar circuitos,
geralmente so encontrados dentro de outros dispositivos.
Os MCUs possuem uma Unidade Central de Processamento (CPU), clock
para dar sequncia s atividades da CPU, memria para armazenar e manipular
dados, conjunto de instrues operacionais (firmware) e portas de entrada e
sada digital (input/output).
H dezenas de tipos diferentes de microcontroladores disponveis no
mercado,
tais
como:
Programmable
Intelligent
Computer
(PIC),
Integrated
Electronics (Intel), Acorn RISC Machine (ARM), Phillips/ NXP, Toshiba, Panasonic,
Atmel e muitos outros. Cada um com caractersticas que devem ser levadas em
conta em um projeto. Microcontroladores so usados em diversos ramos da
indstria,na automao e controle de sensores de calor, proximidade, umidade,
celulares ou receptores de Televiso (TV) entre vrios outros.
2.4.2 Microcontrolador Atmel AVR
Em 1996, a Atmel desenvolveu um microcontrolador que utiliza um conjunto
reduzido de instrues ou Reduced Instruction Set Computing (RISC), isso gerou
uma melhora significativa na capacidade dos microcontroladores de trabalharem
com baixo consumo de energia, permitindo assim um melhor desempenho.
19
A figura 2 mostra o microcontrolador Atmel AVR, ele foi o primeiro
microcontrolador a adotar as memrias do tipo flash como forma de armazenagem
de suas instrues, o Atmel AVR possui uma maior preciso na contagem de tempo,
permitindo um maior aproveitamento de seu processador.
Figura 2 Microcontrolador Atmel AVR
Fonte: Pgina Microcontroladores no Protostack2
Apesar dos Programmable Intelligent Computer (PIC) ainda dominarem o
mercado de MCU's, eles no foram projetados em cima da plataforma RISC, j que
sua tecnologia da dcada de 1980. Sendo assim, os PIC's so menos eficientes
que seus pares da Atmel.
2.5 Sensores
Um sensor pode ser definido como um dispositivo que recebe e responde a
um estmulo ou um sinal, os sensores respondem a estmulos atravs de um sinal
eltrico. Diferente de um sensor o transdutor um dispositivo que converte um tipo
de energia em outra. Muitas vezes um sensor composto de um transdutor
convertendo um estmulo recebido em outro.
Disponvel em: <http://www.protostack.com/microcontrollers/atmega8a-pu-atmel-8-bit-8k-avr-
microcontroller> Acesso em Julho. 2014.
20
Os sensores podem ser ativos e passivos, sensores ativos produzem um sinal
eltrico de sada sem a necessidade de alimentao externa, j um sensor passivo
necessita de energia externa para obter um sinal de sada.
2.5.1 Transdutores
Como falado no tpico anterior, os transdutores so equipamentos que
convertem uma magnitude fsica ou qumica num sinal eltrico. Sistemas de
monitoramento necessitam de sensores para medir magnitudes fsicas como
presso, deslocamento, fora, posio, temperatura, acelerao, deformao,
vibrao. Um medidor formado por um sensor e um transdutor, o sensor detecta
um sinal fsico ou qumico e o transdutor converte em sinal eltrico.
Os Transdutores so divididos em dois tipos: ativos e passivos. Os
transdutores ativos necessitam de uma energia externa para funcionarem, e os
transdutores passivos sempre geram um sinal eltrico de sada em resposta a um
estmulo.
Existem vrias formas de se classificar os transdutores:
Linear ou rotativo: Transdutor de posio linear mede o movimento em tempo
real da mesa ou carro porque se deslocam junto com eles (medida direta),
fornecem resultados mais precisos. O rotativo para medir movimentos
lineares faz-se necessrio a converso de movimento linear em rotativo pr
seu custo menor porque menos robusto.
Analgico e digital: Em um transdutor analgico a variao do sinal se d
continuamente com a mudana de posio da mesa, ex: balana com
medidores de ponteiros. O digital tem sua variao de sinal na forma de pulso
e discreta conforme mudana de posio da mesa, ex: balana com display
digital.
Transdutores incrementais absolutos (ou semi-absolutos) so principalmente
do tipo rotativo, pois necessitam de um mtodo adicional para contar o
nmero de voltas do parafuso quando estiverem medindo distncias maiores
do que o passo do parafuso. Estes transdutores so absolutos no domnio de
uma rotao. (UFRJ, S/DATA).
21
2.5.2 Clulas de carga
Clulas de carga so transdutores de fora, nos quais uma estrutura
mecanicamente rgida possui sensores fixados. Quando aplicada uma carga
mecnica, o sistema deforma-se e a informao transmitida ao sensor.
(Brusamarello, 2006).
Robert Hooke em 1678 formulou a lei de Hooke, essa lei serve para calcular a
deformao de um material causada pela fora mecnica exercida sobre o material,
sendo que a fora proporcional a deformao do corpo, partindo do seu ponto de
equilbrio e multiplicado pela constante da mola. A lei de Hooke pode ser expressa
pela frmula F=Kl, onde F a fora aplicada, K a constante da mola, e l a
deformao do material.
Extensmetro um transdutor capaz de medir a deformao causada em um
material submetido a uma fora mecnica a partir da variao da resistncia eltrica.
Os extensmetros so divididos em dois tipos: materiais resistivos que so os fios
resistivos, lminas e materiais de base que so papel, resina, polister e poliamida.
extremamente importante saber escolher qual material ser utilizada para evitar
erros de preciso na medio.
2.5.3 Sensor de fora resistivo
Neste trabalho utilizou-se um sensor de fora resistivo ou Force Sensitive
Resistor (FSR), um sensor que funciona atravs da variao da resistncia de
acordo com a fora aplicada na rea sensitiva do sensor.
22
A figura 3 mostra como so constitudos os FSR, a rea sensitiva vai
identificar que o sensor foi tocado, o condutor de polmero a resistncia no qual vai
sofrer a deformao com aps um toque mecnico, um isolante de plstico para
isolar todo o circuito, passagem de ar e um circuito flexvel.
Figura 3 - Sensor de fora resistivo
Fonte: Pgina FSR no Sensorwiki
Disponvel em: <http://sensorwiki.org/doku.php/sensors/force-sensitive_resistor> Acesso em Julho.
2014.
23
A figura 4 mostra o grfico de funcionamento do sensor, o FSR utiliza um
polmero que diminui a resistncia medida que h um aumento na fora mecnica
aplicada na rea sensitiva, os valores do grfico so baseados no sensor de 0,5
polegadas (12,7 milmetros) de dimetro utilizado neste trabalho, no qual suporta
uma fora entre 100 gramas e 10 quilogramas, e possui um resistor de 100 quilo
ohm.
Figura 4 - Grfico de Resistncia x Fora
Fonte: Prprio
Embora os FSR tenham propriedades similares s clulas de carga, eles no
so adequados para medio de preciso, por terem uma margem de 10% de erro
para mais ou para menos na sada de dados na medio.
2.6 Dispositivos para Prototipagem
Nessa seo, so abordadas as tecnologias de hardware e software usadas
na soluo do problema proposto.
2.6.1 Plataforma Arduino
24
Arduino uma plataforma de prototipagem digital. Seus criadores inicialmente
visavam seu uso em projetos escolares. A inteno era oferecer uma base de
trabalho de baixo custo. Colocando em outras palavras, um Arduino um minsculo
computador que executa operaes de entrada e sada, sendo possvel conect-lo a
outros dispositivos, permitindo a expanso do mesmo.
O Arduino pode trabalhar de forma independente ou conectada a um
computador. Ele pode ser expandido usando-se para isso, Shields ou escudos, que
so placas que se conectam ao Arduino, e expe seus pinos. Essas expanses
permitem ao Arduino adicionar funes como conectar-se com a internet, utilizar
sensores e outros perifricos que forem conectados. A sua fonte de alimentao
de 7 volts no mnimo e 35 volts no mximo com corrente mnima de 30 Miliampre. A
placa e os demais circuitos requerem tenses entre 5 e 3,3 volts para seu
funcionamento.Conforme a figura 5, podemos visualizar os componentes da placa,
assim como um microcontrolador Atmel AVR de 8 bits4, pinos digitais e analgicos
de
I/O,
entrada
USB
que
permite
conexo
com
computador.
Figura 5 - Placa Arduino
Fonte: Pgina Arduino5 no Arduino
Emerson Alecrim. "O que so bits e bytes? - InfoWester." 2004. 30 Jun. 2014
<http://www.infowester.com/bit.php>
5
Disponvel em: <http://arduino.cc/en/uploads/Main/ArduinoUnoFront450px.jpgr> Acesso em Julho.
2014.
25
Para programar o Arduino e torn-lo apto para realizar uma tarefa, deve-se
usar o Arduno Integrated Development Environment (IDE), que um software livre
que permite programar na linguagem que o Arduno entende, o Wiring.
lngua-
gem baseada em um conjunto de funes em C/ C ++. O IDE permite escrever um
programa de computador, que um conjunto de instrues passo-a- passo, em
seguida, fazer o upload para o Arduino, enviando essas informaes atravs do
cabo USB. Em seguida, executar essas instrues e interagir com tudo o que estiver
conectado.
A figura 6 mostra a IDE Arduino, com a indicao do significado de cada
boto na interface.
Figura 6 - Interface IDE Arduino
Fonte: Prprio
26
2.7 Protoboard
Protoboard uma base de construo de prottipos de circuitos eletrnicos,
essa placa de montagem usada para construir e testar circuitos rapidamente antes
de finalizar qualquer circuito. Aplaca tem vrios furos onde os componentes so
conectados, pode ser conectado praticamente qualquer circuito integrado (CI).
Podemos ver na figura 7, que a protoboard possui quatro trilhas horizontais
de alimentao, duas na parte superior e duas na parte inferior, sendo a 1 trilha
positivam e a 2 trilha negativo, na parte central existem duas bandas de trilhas
verticais, essas bandas so isoladas entre si, permitindo a possibilidade de conectar
um microcontrolador no meio sem que ocorra um curto circuito.
Figura 7 - Protoboard
Fonte: Pgina Protoboard no Paleotechnologist6
No necessrio soldar os componentes na protoboard, para conect-los
bem simples, as pontas dos componentes so postas nos furos, que so ligados por
trilhos de metais abaixo dos orifcios, diferentes componentes podem ser ligados
entre si em um trilho comum.
6
Disponvel em: <http://www.paleotechnologist.net/?p=1693> Acesso em Julho. 2014.
27
2.7.1Cabo Jumper
Cabo jumper um cabo utilizado para transferir sinais eltricos, geralmente
utilizado em protoboard. No mercado esse cabo pode ser encontrado em vrios tipos
de tamanho e cores, a figura 8 mostra um cabo Jumper macho.
Figura 8 - Cabo Jumper
Fonte: Pgina Cabo Jumper no Cinestec7
Disponvel em: <https://www.cinestec.com.br/ecommerce22/detalhes.aspx?cod=20094> Acesso em
Julho. 2014.
28
3 DESENVOLVIMENTO DO PROTTIPO
3.1 Montagem
A figura 9 mostra o esquema de montagem do sistema supervisrio, com
todos os seus componentes, Liquid Crystal Display (LCD) 16x2, Light-Emitting Diode
(LED) nas cores vermelho, amarelo e verde, resistor 100 quiloohm, protoboard,
jumpers, uma plataforma Arduino com um microcontrolador Atmel AVR e FSR.
Figura 9 - Esquema de montagem do sistema supervisrio
Fonte: Prprio
29
3.2 Diagrama de caso de uso
Como pode observada, a figura 10, apresenta as funcionalidades do sistema
e as interaes dos atores do sistema com elas. Vemos ento que o sistema
supervisionado, mas no controlado, sendo o carregamento e o descarregamento do
coletor realizado pelo operador.
Figura 10 - Caso de Uso do Supervisrio
Fonte: Prprio
30
O quadro 1 descreve detalhadamente o cenrio mostrando as funcionalidades
do sistema.
Quadro 1 - Descrio de Atores e Casos de uso
Fonte: Prprio
3.3 Diagrama de atividade
A figura 11 mostra o fluxo das atividades que precisam ser executados
quando o processo iniciado at o seu encerramento.
31
Figura 11 - Diagrama de Atividade do Supervisrio
Fonte: Prprio
O quadro 2 descreve detalhadamente as atividades do sistema, em cada
etapa do processo.
32
Quadro 2 - Descrio Diagrama de Atividade
Fonte: Prprio
3.4 Cdigo fonte
Em cada etapa do servio de coleta dos resduos, os LEDs e o LCD
informaro ao condutor do caminho o status de carga. O cdigo dita o
comportamento do supervisrio de carga na coleta. O trecho de cdigo na figura 12
inicia com as configuraes das bibliotecas e as definies iniciais.
33
Figura 12- Cabealhos e definies
Fonte: Prprio
A figura 13, mostra s linhas de cdigo que fazem referncia aos prottipos
das funes.
Figura 13 - Funes Utilizadas no Aplicativo
Fonte: Prprio
34
Esses prottipos so uma exigncia da linguagem C/ C++ International
Organization for Standardization (ISO), mas no Wiring, linguagem utilizada na
plataforma Arduino, esses prottipos so opcionais. Contudo, foram inseridos no
cdigo para facilitar a leitura do mesmo.
Seguindo a sequncia lgica de declaraes, na figura 14, as variveis que
permitem a manipulao dos dados vindos dos sensores, so do tipo analgico e
precisam ser mapeados, de tal forma, que possam ser guardados na forma de zeros
e uns, ou seja, digitalmente.
Figura 14 - Variveis do sistema
Fonte: Prprio
35
Na figura 15 podemos ver o uso do comando map que permite que as
transformaes sejam feitas nos dados, guardando as devidas propores, como
mostrado na funo Loop.
Figura 15 - Principais Funes do Sistema
Fonte: Prprio
A figura 16 mostra as condies para que cada LED acenda, bem como as
mensagens que sero mostradas na tela.
36
Figura 16 - Sesso do Cdigo que Controla o Censor
Fonte: Prprio
A figura 17 mostra a condio de mensagem que vai aparecer no LCD de
acordo com o LED que acender.
37
Figura 17 - Controle do Comportamento dos LEDs
Fonte: Prprio
38
A figura 18 mostra que faz com que o display informe ao usurio a quantidade
de carga no caminho.
Figura 18 - Funes de controle do LCD
Fonte: Prprio
39
3.5 Monitoramento em Tempo Real
A descrio do monitoramento do supervisrio de carga ocorre em quatro
etapas, ao se iniciar o roteiro de coleta o motorista inicializa o dispositivo que emiti a
primeira mensagem -supervisrio-, em seguida ascende o LED de cor verde com a
seguinte mensagem Coletor vazio!, a terceira etapa acontece quando o coletor
atinge metade da capacidade de carga ascendendo o LED de cor amarelo com a
seguinte mensagem Colet carga! e por fim quando a capacidade estiver no
mximo o LED de cor vermelho ascende com a ltima mensagem Colet + de 3/4!.
O monitoramento da carga atravs do Arduino pode ser incrementado com quantos
pontos de monitoramento desejados e nmeros de mensagens a se exibir alm de
ser possvel adicionar mais recursos ao sistema.
3.5.1 Testes
No primeiro teste no foi aplicado nenhuma fora mecnica no FSR, podemos
ver na figura 19 que o LED verde acendeu e a mensagem de coletor vazio foi
mostrada na tela de LCD.
Figura 19 - Teste Realizado sem Aplicao de Fora Mecnica
Fonte: Prprio
40
O segundo teste foi realizado aplicando uma fora de5 quilograma-fora (Kgf)
no FSR, podemos ver na figura 20 que o LED verde apagou e o LED amarelo
acendeu, a mensagem na tela foi alterada para coletor carga.
Figura 20 - Teste Realizado Aplicando 5 Kgf no FSR
Fonte: Prprio
41
O terceiro teste foi realizado aplicando uma fora de 10 quilogramas-fora
(Kgf) no FSR, podemos ver na figura 21 que o LED amarelo apagou e o LED
vermelho acendeu, a mensagem na tela foi alterada para coletora carga acima de .
Figura 21 - Teste Realizado Aplicando 10 Kgf no FSR
Fonte: Prprio
Conclumos que mesmo com a margem de impreciso do FSR de 10%, os
testes foram realizados com sucesso, como um trabalho futuro, sero alteradas as
informaes que aparecero na tela LCD, para mostrar a quantidade de carga em
tempo real.
42
3.6 Interface com o Usurio
A figura 22 mostra como vai ficar a interface finalizada do prottipo,a interface
com o usurio de simples entendimento ao condutor do caminho, os LED vo
acender de acordo com a quantidade de carga, a tela de LCD mostrara o status da
carga, como o motorista no pode perder a ateno nas vias pblicas, o dispositivo
servir apenas para orientar o motorista, no havendo a necessidade de configurar o
dispositivo.
Figura 22 - Interface Supervisrio
Fonte: Prprio
43
4 CONCLUSO
Nesse trabalho foi apresentado um prottipo de um sensor de fora resistivo
que ser instalado em cada caminho de lixo, para que o motorista tenha
informao sobre a quantidade de peso que est carregando substituindo o modelo
usado atualmente que alm de gerar danos aos veculos e vias pblicas, pode fazer
com que o trajeto no seja concludo.
Podemos observar que a substituio do modelo antigo pela implementao
desse novo modelo, possibilita a autonomia do motorista de poder solicitar um novo
caminho para dar continuidade ao trajeto, ir evitar danos s vias pblicas devido
ao excesso de peso, reduo dos danos gerados aos prprios veculos.
Como trabalho futuro pretende-se melhorar a usabilidade da interface dos
equipamentos
instalados
nos
caminhes,
implementar
um
sistema
de
monitoramento em tempo real para que a central da SLU receba as informaes de
peso de cada veculo, para que possa ser feito uma gesto melhor da quantidade de
veculos enviados em cada trajeto.
44
5 REFERNCIAS BIBLIOGRFICAS
MACROBERTS, Michael. Beginning Arduino (Technology in Action). 2. Ed. New
York: Apress, 2013, 424 p.
PURDUM, Beginning C for Arduino: Learn C Programming for the Arduino. 1.
Ed. New York: Apress, 2012, 280 p.
EVANS, Brain. Beginning Arduino Programming.1. Ed. New York: Apress, 2011,
272p.
BELL, Charles. Beginning Sensor Networks with Arduino and Raspberry Pi. 1.
Ed. New York: Apress, 2013, 300 p.
Ministrio
das
Cidades.
Cdigo
de
Trnsito
Brasileiro.
Disponvel
em:<http://www.denatran.gov.br/publicacoes/download/ctb_e_legislacao_compleme
ntar.pdf>.Acesso em: 27 set.2013.
Works Cited McGrath, Mic
. Sensor Technologies:
Healthcare, Wellness, and Environmental Applications. Print.
Prefeitura Municipal de Belo Horizonte.Superintendncia de Limpeza Urbana .
Disponvel em:<http://www.portalpbh.pbh.gov.br/pbh/slu>.Acesso em: 15 set.2013.
Anda mungkin juga menyukai
- Elementos de Estatistica Comput - Alejandro C. Frery PDFDokumen105 halamanElementos de Estatistica Comput - Alejandro C. Frery PDFLucius Thales da SilvaBelum ada peringkat
- Apostila Pic C Automacao SerraDokumen98 halamanApostila Pic C Automacao Serraeramos_77Belum ada peringkat
- Manual de Desenvolvimento de Sistemas Seguros Vol2 v2.0Dokumen134 halamanManual de Desenvolvimento de Sistemas Seguros Vol2 v2.0Ebenezer Xavier Dos ReisBelum ada peringkat
- Trabalho de Pgi e MarketingDokumen1 halamanTrabalho de Pgi e MarketingEbenezer Xavier Dos ReisBelum ada peringkat
- Grupoterapias atuaisDokumen4 halamanGrupoterapias atuaisadna_félix_2Belum ada peringkat
- Chartier e o Livro Digital-TradicionalDokumen3 halamanChartier e o Livro Digital-TradicionalMaria CarolineBelum ada peringkat
- Memorial Descritivo Indústria de BiscoitosDokumen19 halamanMemorial Descritivo Indústria de BiscoitosMarcos FregatiBelum ada peringkat
- Quadrinhos - Mitos Sobre InovaçãoDokumen29 halamanQuadrinhos - Mitos Sobre InovaçãoFlávia Larissa Santos BarbosaBelum ada peringkat
- O que são fraçõesDokumen29 halamanO que são fraçõesAna Santos33% (3)
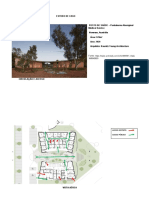
- Posto de Saúde Aborígine em Newman, AustráliaDokumen8 halamanPosto de Saúde Aborígine em Newman, AustráliaWilliam José FerreiraBelum ada peringkat
- Como Melhorar As Relações Através Da Comunicação PDFDokumen9 halamanComo Melhorar As Relações Através Da Comunicação PDFAna Leonor BorgesBelum ada peringkat
- Arquitetura Mbyá-Guarani em área de Mata AtlânticaDokumen47 halamanArquitetura Mbyá-Guarani em área de Mata AtlânticaJúlia VidorBelum ada peringkat
- Máscaras Do Pavor (Etc.) (Z-Library)Dokumen186 halamanMáscaras Do Pavor (Etc.) (Z-Library)Deivson VargasBelum ada peringkat
- Suely Rolnik - Furor de ArquivoDokumen10 halamanSuely Rolnik - Furor de ArquivoIvair ReinaldimBelum ada peringkat
- Ficha para Observação Da Sala de AulaDokumen3 halamanFicha para Observação Da Sala de AulaAntonio José AlvesBelum ada peringkat
- Código de Ética ProfissionalDokumen18 halamanCódigo de Ética ProfissionalIgor Silva71% (7)
- Execução contra CooperativaDokumen19 halamanExecução contra CooperativaCaso BancoopBelum ada peringkat
- Catálogo Kensington 2012Dokumen18 halamanCatálogo Kensington 2012Maicon Bruno AlbaBelum ada peringkat
- CADERNO QUESTÕES TEORIA ADMINISTRAÇÃODokumen153 halamanCADERNO QUESTÕES TEORIA ADMINISTRAÇÃONoemi MirandaBelum ada peringkat
- WiFi Eduroam UMinho LinuxDokumen7 halamanWiFi Eduroam UMinho LinuxIze BarretoBelum ada peringkat
- Riscos e segurança em laboratórios clínicosDokumen3 halamanRiscos e segurança em laboratórios clínicosLudmila Lopes Silva FigueredoBelum ada peringkat
- Resumo JAIDokumen4 halamanResumo JAIThiago BiazusBelum ada peringkat
- O InventorDokumen127 halamanO Inventorlicitacao2medfarmaceBelum ada peringkat
- Frases MatematicasDokumen2 halamanFrases MatematicasHipnotesteBelum ada peringkat
- Desenho de ObservacaoDokumen7 halamanDesenho de ObservacaoHenry Alves de LimaBelum ada peringkat
- Artigo Diogo Meyer para SeminarioDokumen5 halamanArtigo Diogo Meyer para SeminarioloftyBelum ada peringkat
- EXEMPLO Disc Classic 2.0Dokumen0 halamanEXEMPLO Disc Classic 2.0Sil DrabeskiBelum ada peringkat
- Apostila Diluicao DrogasDokumen11 halamanApostila Diluicao DrogasLrbAeiBelum ada peringkat
- Artigo - Aplicabilidade Do RCN para Educação Infantil - Vol 3 PDFDokumen12 halamanArtigo - Aplicabilidade Do RCN para Educação Infantil - Vol 3 PDFGF GabryBelum ada peringkat
- Questões Objetivas de Desenho Da Figura HumanaDokumen4 halamanQuestões Objetivas de Desenho Da Figura HumanaDébora FernandesBelum ada peringkat
- Elemento Fundamentais Do RoteiroDokumen46 halamanElemento Fundamentais Do RoteiroGesiel Boa SorteBelum ada peringkat
- Lindóia Office, Sala Virtual para ProfissionaisDokumen13 halamanLindóia Office, Sala Virtual para ProfissionaisdeboraBelum ada peringkat
- Agroecologia e Agricultura FamiliarDokumen19 halamanAgroecologia e Agricultura FamiliarBruna BrandãoBelum ada peringkat
- Escoamento Laminar entre PlacasDokumen104 halamanEscoamento Laminar entre PlacasRafaela Araújo60% (5)