Anda mungkin juga menyukai
- Aula CoresDokumen39 halamanAula CoresF.s. GuiziBelum ada peringkat
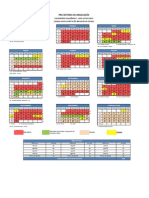
- Calendario Academico 2015Dokumen2 halamanCalendario Academico 2015F.s. GuiziBelum ada peringkat
- Modernas Tecnologia de Aquisição de ImagensDokumen16 halamanModernas Tecnologia de Aquisição de ImagensF.s. GuiziBelum ada peringkat
- Misterios Nordicos Mirella FaurDokumen496 halamanMisterios Nordicos Mirella FaurNoctos FafnirBelum ada peringkat
- Dialnet Havamal 5180469 PDFDokumen57 halamanDialnet Havamal 5180469 PDFAldilyBelum ada peringkat
- Dialnet Havamal 5180469 PDFDokumen57 halamanDialnet Havamal 5180469 PDFAldilyBelum ada peringkat
- Os desafios da música lírica em AngolaDokumen30 halamanOs desafios da música lírica em AngolaNúrio VenâncioBelum ada peringkat
- Texto 14 Paradigmas Crise e Revoluções - A História Da Química Na Perspectiva KuhnianaDokumen3 halamanTexto 14 Paradigmas Crise e Revoluções - A História Da Química Na Perspectiva KuhnianatoditampsBelum ada peringkat
- Resumo MEP: fontes, impacto, qualis e descritoresDokumen5 halamanResumo MEP: fontes, impacto, qualis e descritoresAlana PimentelBelum ada peringkat
- LISTA 03 - Aulas 01 Até 06 - EsPCEx - Fusos HorariosDokumen6 halamanLISTA 03 - Aulas 01 Até 06 - EsPCEx - Fusos HorariosJoel Rossato FilhoBelum ada peringkat
- Guide 7 ImageDokumen21 halamanGuide 7 Imagehello it'smeBelum ada peringkat
- Prevenção de Lesões Do Ligamento Cruzado Anterior em FutebolistasDokumen8 halamanPrevenção de Lesões Do Ligamento Cruzado Anterior em FutebolistasJéssica Lima Nascimento NogueiraBelum ada peringkat
- Guia para cadastros no GF ExplorerDokumen94 halamanGuia para cadastros no GF Explorervinicius souzaBelum ada peringkat
- Investigação Da Condutividade Elétrica em Solução de KCL A 0,01MDokumen3 halamanInvestigação Da Condutividade Elétrica em Solução de KCL A 0,01MbrumaiafotosBelum ada peringkat
- Interlac 84Dokumen4 halamanInterlac 84Jarbas MoraesBelum ada peringkat
- Refração Da LuzDokumen2 halamanRefração Da Luzanita salezzeBelum ada peringkat
- F250 - Q - Motor Cummins (Eletrônico)Dokumen76 halamanF250 - Q - Motor Cummins (Eletrônico)Jean Pablo da Luz100% (2)
- Talhas Berg-SteelDokumen2 halamanTalhas Berg-SteelFrederico Marconi CosenzaBelum ada peringkat
- G551 1823 - BA - Rev 0 1 0 - 2017 06 28 - PTBDokumen76 halamanG551 1823 - BA - Rev 0 1 0 - 2017 06 28 - PTBlincon com.brBelum ada peringkat
- CHC - Abelhas em Apuros! PDFDokumen6 halamanCHC - Abelhas em Apuros! PDFCaroline Martins NacariBelum ada peringkat
- Você É Precioso para Ele - David Wilkerson PDFDokumen9 halamanVocê É Precioso para Ele - David Wilkerson PDFAnonymous ncYGha5Belum ada peringkat
- Marketing de Vendas - PaperDokumen13 halamanMarketing de Vendas - Paperthiagoreisrs100% (4)
- Três Verdades Eternas para Viver em 2012Dokumen2 halamanTrês Verdades Eternas para Viver em 2012NiveaSilvando OliveiraBelum ada peringkat
- Manual Orona Arca 2Dokumen201 halamanManual Orona Arca 2Jó RamosBelum ada peringkat
- Infecções HospitalaresDokumen11 halamanInfecções HospitalaresLéuzia casteloBelum ada peringkat
- Estrela e Suas OrigensDokumen5 halamanEstrela e Suas Origensvitor100% (1)
- Teste PlantasDokumen5 halamanTeste Plantaslilianarmdias67% (3)
- RA.1 - Compreender Princípios e Conceitos Básicos de Um Sistema EconómicoDokumen26 halamanRA.1 - Compreender Princípios e Conceitos Básicos de Um Sistema EconómicoStelio Cuinica100% (4)
- Água KangenDokumen9 halamanÁgua KangenSimone Coutinho BlancoBelum ada peringkat
- Pontualidade na EscolaDokumen1 halamanPontualidade na EscolaMarcio Luiz EwaldBelum ada peringkat
- IST Transferencia de Massa PDFDokumen27 halamanIST Transferencia de Massa PDFxcite4everBelum ada peringkat
- Cafes Lendas - Travis BaldreeDokumen351 halamanCafes Lendas - Travis Baldreeanaluizagui200750% (2)
- Cifras Ceia Do Senhor 2020Dokumen12 halamanCifras Ceia Do Senhor 2020Milton AlvesBelum ada peringkat
- Sisu 2016 1chamada DivulgaDokumen69 halamanSisu 2016 1chamada DivulgaamandaBelum ada peringkat
- Adesão à Ata de Registro de Preço para serviços de iluminação públicaDokumen416 halamanAdesão à Ata de Registro de Preço para serviços de iluminação públicaChouji FragosoBelum ada peringkat