Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Isx15 CM2250 4022234Dokumen1 halamanIsx15 CM2250 4022234Josuu Garcia100% (7)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Rhino ScriptDokumen118 halamanRhino Scriptmarkovit100% (1)
- Funcionamento Dos Motores Volvo Penta D1-2-3-4-6Dokumen90 halamanFuncionamento Dos Motores Volvo Penta D1-2-3-4-6Hugo Soberano100% (8)
- VOGELE Technical Training - Spray JetDokumen171 halamanVOGELE Technical Training - Spray JetCui71% (14)
- Donaldson Air F1160051Dokumen162 halamanDonaldson Air F1160051airpart0% (1)
- G60me C10 - 5 LgipDokumen594 halamanG60me C10 - 5 LgipKhải Nguyễn MinhBelum ada peringkat
- 7 Review of Fundamentals - Heat and Mass TransferDokumen20 halaman7 Review of Fundamentals - Heat and Mass TransferPRASAD326100% (2)
- Wp33l Ba 1 Etl 1 enDokumen114 halamanWp33l Ba 1 Etl 1 enRick LuBelum ada peringkat
- MTU CI Ag Mining SalesProgramDokumen37 halamanMTU CI Ag Mining SalesProgramMarcial MilitanteBelum ada peringkat
- LNG Propulsion 7Dokumen36 halamanLNG Propulsion 7xlikoBelum ada peringkat
- Surveyor's day report on MAN dual-fuel enginesDokumen45 halamanSurveyor's day report on MAN dual-fuel enginesRamprabu ChandrasekarBelum ada peringkat
- Simulation of The ManauveringDokumen100 halamanSimulation of The ManauveringayhanatakanBelum ada peringkat
- Development of DP System PDFDokumen102 halamanDevelopment of DP System PDFayhanatakanBelum ada peringkat
- Cranes Acop 2009 PDFDokumen125 halamanCranes Acop 2009 PDFayhanatakanBelum ada peringkat
- Gheoca Valentin EuroCV English 23-02-10Dokumen2 halamanGheoca Valentin EuroCV English 23-02-10ayhanatakanBelum ada peringkat
- Ship Stability CriteriesDokumen9 halamanShip Stability CriteriesayhanatakanBelum ada peringkat
- Savings in Ship ProductionDokumen31 halamanSavings in Ship ProductionluyogyiBelum ada peringkat
- Engine Room CBT Simulator ModulesDokumen7 halamanEngine Room CBT Simulator ModulesEko PratonoBelum ada peringkat
- HBW-115 T5: Industrial Range Open SkidDokumen6 halamanHBW-115 T5: Industrial Range Open SkidJoanCarlesLLopysBelum ada peringkat
- Generator Set SpecificationDokumen2 halamanGenerator Set SpecificationGalang PratamaBelum ada peringkat
- SF Ter 0421Dokumen21 halamanSF Ter 0421suraj pandeyBelum ada peringkat
- Roda Deaco Systems GuideDokumen13 halamanRoda Deaco Systems GuideSyawkat KhalafBelum ada peringkat
- 3tnv82a BdsaDokumen1 halaman3tnv82a BdsahastaBelum ada peringkat
- Ape Classic Brochure 2018Dokumen2 halamanApe Classic Brochure 2018Arthur KwariaBelum ada peringkat
- AutomotiveSensors Review IEEESensors2008 PDFDokumen22 halamanAutomotiveSensors Review IEEESensors2008 PDFasdfasdfsafdasfsaBelum ada peringkat
- Management Discussion and AnalysisDokumen22 halamanManagement Discussion and AnalysisChiradeep BhattacharyaBelum ada peringkat
- TMD 22 PDokumen2 halamanTMD 22 PdeepakgkdBelum ada peringkat
- 25-40kVA - Spec Sheet - Rev-0Dokumen4 halaman25-40kVA - Spec Sheet - Rev-0apandey070273Belum ada peringkat
- Lesson 1: Cylinder and CrankcaseDokumen35 halamanLesson 1: Cylinder and CrankcasefgfgffgdfgdfgfBelum ada peringkat
- IOP Hydraulic Power UnitsDokumen5 halamanIOP Hydraulic Power Unitsswapneel_kulkarni100% (1)
- New Holland W270 Wheel Loader Service Repair Manual-2Dokumen21 halamanNew Holland W270 Wheel Loader Service Repair Manual-2ggjjjjotonesBelum ada peringkat
- Kta50-G3 Pi734aDokumen10 halamanKta50-G3 Pi734ahmdawu baslBelum ada peringkat
- CHP 19 Overview Fuel Inj.Dokumen29 halamanCHP 19 Overview Fuel Inj.Foresight MisrBelum ada peringkat
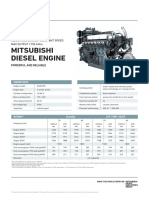
- Mitsubishi Diesel Engine - S16R-PTADokumen2 halamanMitsubishi Diesel Engine - S16R-PTAfendynovapamelaBelum ada peringkat
- C640D5Dokumen4 halamanC640D5mohsen_cumminsBelum ada peringkat
- Generator Set Supply QuoteDokumen6 halamanGenerator Set Supply QuoteAnonymous uLAATWpf50% (2)
- 250kVA DG Set Technical SpecsDokumen19 halaman250kVA DG Set Technical SpecsMary HarrisonBelum ada peringkat
- Eberspacher Hydronic 30 Workshop ManualDokumen57 halamanEberspacher Hydronic 30 Workshop ManualDavid Butler0% (1)