Anda mungkin juga menyukai
- Análisis de Mercado Grupo AlseaDokumen19 halamanAnálisis de Mercado Grupo AlseaAle CalderónBelum ada peringkat
- Examen ParcialDokumen5 halamanExamen ParcialJonaiker Salazar0% (2)
- MY SYMPTOMS Sesion 7 1 y 2 InglesDokumen4 halamanMY SYMPTOMS Sesion 7 1 y 2 InglesCarina Huillca Huamani100% (1)
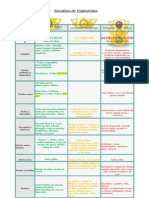
- Semaforo Hipertrigliceridemia (1) ChequeadaDokumen2 halamanSemaforo Hipertrigliceridemia (1) ChequeadaMarcela AdasmeBelum ada peringkat
- CARTA CONVENIO EMPRESARIAL Escenario Siete - 2Dokumen3 halamanCARTA CONVENIO EMPRESARIAL Escenario Siete - 2Arte CulturaBelum ada peringkat
- Actividad 3 Unidad 5Dokumen20 halamanActividad 3 Unidad 5Mayelyn GuzmanBelum ada peringkat
- Formato Igafom No Metalica PreventivoDokumen76 halamanFormato Igafom No Metalica PreventivoMonica Karina Arpe CalluchiBelum ada peringkat
- Deficiencia de Vitamina B12 Como Etiología de Deterioro Cognitivo y DemenciaDokumen15 halamanDeficiencia de Vitamina B12 Como Etiología de Deterioro Cognitivo y DemenciaEricka FelizBelum ada peringkat
- Directrices Creacion y Fortalecimiento Bpdepartamentales - 0Dokumen22 halamanDirectrices Creacion y Fortalecimiento Bpdepartamentales - 0santyBelum ada peringkat
- Manual de Instalacion APP Monitor VIS v1.0Dokumen20 halamanManual de Instalacion APP Monitor VIS v1.0Miguel RuizBelum ada peringkat
- Actividad de SismoDokumen5 halamanActividad de SismoTania Peña GarciaBelum ada peringkat
- Guia de Resist MatDokumen9 halamanGuia de Resist MatAlvaro Muruchi Rojas100% (1)
- Empresa de ChocolateDokumen25 halamanEmpresa de ChocolateSaira Arely Tobar MoralesBelum ada peringkat
- Proyecto de Emprendimiento 3H Página Web CosméticosfnlDokumen16 halamanProyecto de Emprendimiento 3H Página Web Cosméticosfnlalam beltranBelum ada peringkat
- ACT - CTE INTENSIVO 3 y 4Dokumen21 halamanACT - CTE INTENSIVO 3 y 4atziri jhovanna vazquez noriegaBelum ada peringkat
- Trabajo1GOPSMBA33AGrupo2 PacificoVidav6Dokumen16 halamanTrabajo1GOPSMBA33AGrupo2 PacificoVidav6Atik NaiBelum ada peringkat
- Punto de PartidaDokumen17 halamanPunto de Partidaluisalinas21687Belum ada peringkat
- Guia Única Etica y Valores Tercero J. Mañana 2020Dokumen5 halamanGuia Única Etica y Valores Tercero J. Mañana 2020Maricella Villanueva Orozco100% (1)
- CATEDRA 8 - Mecanismos de Fortalecimiento de Los MaterialesDokumen47 halamanCATEDRA 8 - Mecanismos de Fortalecimiento de Los MaterialesteodoroBelum ada peringkat
- ACTIVIDAD 1 DEL MODULO CONTROVERSIA, SE VAN LOS CARNIVOROS (Primera Parte) Luis Rangel 1104Dokumen3 halamanACTIVIDAD 1 DEL MODULO CONTROVERSIA, SE VAN LOS CARNIVOROS (Primera Parte) Luis Rangel 1104luis eduardo rangel sotoBelum ada peringkat
- 10mo Rubrica Proyecto 3-1-14424532Dokumen2 halaman10mo Rubrica Proyecto 3-1-14424532LexaBelum ada peringkat
- Premio Nacional de Literatura PDFDokumen3 halamanPremio Nacional de Literatura PDFPatricia ATBelum ada peringkat
- Proyecto BaluDokumen8 halamanProyecto Balusanyira castroBelum ada peringkat
- Las ResistenciasDokumen11 halamanLas ResistenciasLucaBelum ada peringkat
- Cortadora de FiambresDokumen3 halamanCortadora de Fiambressimone2miller49Belum ada peringkat
- Galvanizadora CEMESA-ESP'ESOR - GALVANIZADODokumen7 halamanGalvanizadora CEMESA-ESP'ESOR - GALVANIZADOUlises CardenasBelum ada peringkat
- Resumen 20 LineasDokumen1 halamanResumen 20 LineasKriïZtïi FxrïnxngöBelum ada peringkat
- YPFB Negocia Otra Adenda de Venta de Gas A ArgentinaDokumen2 halamanYPFB Negocia Otra Adenda de Venta de Gas A ArgentinaDIEGOBelum ada peringkat
- Combustión Alcohol EtílicoDokumen7 halamanCombustión Alcohol EtílicoOoscaar Daaviid Yaaneez LaaraaBelum ada peringkat
- QR P9 CerebroDokumen15 halamanQR P9 CerebroMaryBelum ada peringkat