Anda mungkin juga menyukai
- Appendix e - Composition of General SourcesDokumen2 halamanAppendix e - Composition of General SourcescastrojpBelum ada peringkat
- Appendix L - The Dynamic Macroscopic Scalar Potential Function Due To A Volume of Polarized Dielectric MaterialDokumen3 halamanAppendix L - The Dynamic Macroscopic Scalar Potential Function Due To A Volume of Polarized Dielectric MaterialcastrojpBelum ada peringkat
- ElectromagneticsDokumen20 halamanElectromagneticscastrojp0% (2)
- Appendix N - The Average Magnetostatic Field Intensity Inside A Sphere Containing An Arbitrary Distribution of Current LoopsDokumen5 halamanAppendix N - The Average Magnetostatic Field Intensity Inside A Sphere Containing An Arbitrary Distribution of Current LoopscastrojpBelum ada peringkat
- Mathematical Supplement Part IDokumen7 halamanMathematical Supplement Part IcastrojpBelum ada peringkat
- Appendix M - The Damping Constant of A Freely Oscillating DipoleDokumen2 halamanAppendix M - The Damping Constant of A Freely Oscillating DipolecastrojpBelum ada peringkat
- 5266347Dokumen13 halaman5266347castrojpBelum ada peringkat
- Appendix C - Some Properties of Bessel FunctionsDokumen5 halamanAppendix C - Some Properties of Bessel FunctionscastrojpBelum ada peringkat
- Appendix D - The Associated Legendre EquationDokumen6 halamanAppendix D - The Associated Legendre EquationcastrojpBelum ada peringkat
- Appendix A - Fringe Shift Versus Rotation of The Michelson-Morley ApparatusDokumen2 halamanAppendix A - Fringe Shift Versus Rotation of The Michelson-Morley ApparatuscastrojpBelum ada peringkat
- Appendix B - Classical Doppler Shift From A Moving Source in The Presence of A Moving EtherDokumen4 halamanAppendix B - Classical Doppler Shift From A Moving Source in The Presence of A Moving EthercastrojpBelum ada peringkat
- Decoupling and Pole Assignment in Linear Multivariable Systems AGeometric ApproachDokumen20 halamanDecoupling and Pole Assignment in Linear Multivariable Systems AGeometric ApproachcastrojpBelum ada peringkat
- Appendix C - Some Properties of Bessel FunctionsDokumen5 halamanAppendix C - Some Properties of Bessel FunctionscastrojpBelum ada peringkat
- 5266375Dokumen14 halaman5266375castrojpBelum ada peringkat
- 5397092Dokumen10 halaman5397092castrojpBelum ada peringkat
- About The AuthorsDokumen2 halamanAbout The AuthorscastrojpBelum ada peringkat
- 5266325Dokumen23 halaman5266325castrojpBelum ada peringkat
- Electrical Power SystemsDokumen11 halamanElectrical Power SystemscastrojpBelum ada peringkat
- Mentor12 Ingles ScreenDokumen16 halamanMentor12 Ingles ScreencastrojpBelum ada peringkat
- Commissioning Complex Busbar Prot SchemesDokumen9 halamanCommissioning Complex Busbar Prot Schemesrasheed313Belum ada peringkat
- Optimal Regulation ProcessesDokumen21 halamanOptimal Regulation ProcessescastrojpBelum ada peringkat
- On Self Tuning RegulatorsDokumen17 halamanOn Self Tuning RegulatorscastrojpBelum ada peringkat
- Discrete-Time Multivariable Adaptive ControlDokumen10 halamanDiscrete-Time Multivariable Adaptive ControlcastrojpBelum ada peringkat
- I El 217Dokumen74 halamanI El 217selvamuthukumarBelum ada peringkat
- Notes On The Illustrations: and Measurement at The National Bureau of Standards, by Wilbert F. Synder andDokumen1 halamanNotes On The Illustrations: and Measurement at The National Bureau of Standards, by Wilbert F. Synder andcastrojpBelum ada peringkat
- Control System Synthesis by Root Locus MethodDokumen6 halamanControl System Synthesis by Root Locus MethodcastrojpBelum ada peringkat
- Control TheoryDokumen8 halamanControl TheorycastrojpBelum ada peringkat
- Appendix 4 - Numerical Values For Some Important Physical ConstantsDokumen1 halamanAppendix 4 - Numerical Values For Some Important Physical ConstantscastrojpBelum ada peringkat
- An Invariance Principle in The Theory of StabilityDokumen12 halamanAn Invariance Principle in The Theory of StabilitycastrojpBelum ada peringkat
- Absolute Stability of Nonlinear Systems of Automatic ControlDokumen21 halamanAbsolute Stability of Nonlinear Systems of Automatic ControlcastrojpBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- SchneiderElectric 111711 PDFDokumen17 halamanSchneiderElectric 111711 PDFShiva Naga KumarBelum ada peringkat
- Paes 207 Rice Mill Methods of Test PDFDokumen22 halamanPaes 207 Rice Mill Methods of Test PDFEdsel Jay RaperBelum ada peringkat
- Vel-Vels Emergency Lamp 1270Dokumen2 halamanVel-Vels Emergency Lamp 1270Eolo RojasBelum ada peringkat
- Pnoz X13 GBDokumen4 halamanPnoz X13 GByus11Belum ada peringkat
- Landers PMS Cost Proposalrev01 - Electric Pro 04apr2023Dokumen1 halamanLanders PMS Cost Proposalrev01 - Electric Pro 04apr2023IVM PhilsBelum ada peringkat
- The Impacts of Customers' Zero-Export Solar PV Installations To The Distribution Service of MeralcoDokumen33 halamanThe Impacts of Customers' Zero-Export Solar PV Installations To The Distribution Service of MeralcoSun TzuBelum ada peringkat
- High Voltage Engineering: Chapter 4 Generation of High VoltagesDokumen75 halamanHigh Voltage Engineering: Chapter 4 Generation of High VoltagesSunny ModiBelum ada peringkat
- L&T GIC Catalogue 25 Sep 09Dokumen24 halamanL&T GIC Catalogue 25 Sep 09Naresh KapuBelum ada peringkat
- PAT Status:: MobitelDokumen20 halamanPAT Status:: Mobiteldumindu1Belum ada peringkat
- Ef TD: Transformer Differential ProtectionDokumen2 halamanEf TD: Transformer Differential ProtectionShawn GonzalesBelum ada peringkat
- Active, Reactive, Apparent and Complex Power. Simple Explanation With FormulasDokumen4 halamanActive, Reactive, Apparent and Complex Power. Simple Explanation With FormulasHussam GujjarBelum ada peringkat
- DC30D Genset Controller User Manual V1.0-20181201Dokumen27 halamanDC30D Genset Controller User Manual V1.0-20181201Jaime Igor Viegas64% (11)
- Example of Minutes of MeetingDokumen7 halamanExample of Minutes of MeetingLuqman BostBelum ada peringkat
- Xpower Inverter 1500: Owner'S GuideDokumen32 halamanXpower Inverter 1500: Owner'S GuideCamBelum ada peringkat
- 02 - Catalogo OSM 15kV - 27kVDokumen2 halaman02 - Catalogo OSM 15kV - 27kVWilliam Dante Mescco SaireBelum ada peringkat
- 7UM511 CatalogueDokumen12 halaman7UM511 Cataloguebuianhtuan1980Belum ada peringkat
- Parallel Operation of TransformersDokumen3 halamanParallel Operation of TransformersHARIHARANBelum ada peringkat
- FFPF20UP20DNDokumen6 halamanFFPF20UP20DNJesus Maria LizarzabalBelum ada peringkat
- Catalog Telemecanique LC1 LR2 Overload Relay RefDokumen8 halamanCatalog Telemecanique LC1 LR2 Overload Relay Refthanggimme.phanBelum ada peringkat
- Measurement of Insulation Resistance (IR) - Part 1 - EEP PDFDokumen7 halamanMeasurement of Insulation Resistance (IR) - Part 1 - EEP PDFmahmoud fawzyBelum ada peringkat
- Aluminium Conductors Steel Reinforced ACSRDokumen1 halamanAluminium Conductors Steel Reinforced ACSRBaskar ElBelum ada peringkat
- Amarraj 2020Dokumen6 halamanAmarraj 2020rock starBelum ada peringkat
- CIGRE Curso HVDC - Perdas - Canelhas PDFDokumen10 halamanCIGRE Curso HVDC - Perdas - Canelhas PDFcarlosrenatorcBelum ada peringkat
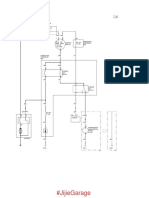
- Jazz GK5 Starting System Circuit Diagram Build-In Type MICUDokumen1 halamanJazz GK5 Starting System Circuit Diagram Build-In Type MICUTomyBelum ada peringkat
- Design and Implementation of An Independent Renewable Energy Source (5kva Solar Powered Inverter)Dokumen17 halamanDesign and Implementation of An Independent Renewable Energy Source (5kva Solar Powered Inverter)BayeBelum ada peringkat
- Case StudyDokumen15 halamanCase StudyChaitali moreyBelum ada peringkat
- Capacitors and Inductors in DC CircuitsDokumen10 halamanCapacitors and Inductors in DC CircuitsLuka LasicBelum ada peringkat
- HT Cable Sizing Calculation For 1C Cu-FormatDokumen4 halamanHT Cable Sizing Calculation For 1C Cu-Formatboopathy1787Belum ada peringkat
- Wiring DiagramDokumen12 halamanWiring DiagramÁlvaro TorrellasBelum ada peringkat
- Claro Terra Floodlight 60W-200W v6.0Dokumen5 halamanClaro Terra Floodlight 60W-200W v6.0Charlie MendozaBelum ada peringkat