Anda mungkin juga menyukai
- Autonomous Vehicles FinalDokumen27 halamanAutonomous Vehicles FinalRichard Moore100% (1)
- Rao & Naidu Engineering College: Topic: Embedded Systems SUB: Automation of CarsDokumen9 halamanRao & Naidu Engineering College: Topic: Embedded Systems SUB: Automation of Carsapi-19799369100% (1)
- Design & Development of An Autonomic Integrated Car Parking SystemDokumen4 halamanDesign & Development of An Autonomic Integrated Car Parking Systemعمر الفاضل ود ستوناBelum ada peringkat
- Autonomous VehiclesDokumen6 halamanAutonomous VehiclesEdward ShenBelum ada peringkat
- AV Implementation Predictions: Implications for Transport PlanningDokumen21 halamanAV Implementation Predictions: Implications for Transport PlanninghrishikeshBelum ada peringkat
- Pick and Place Robotic ARM Using PLC: Abhiraj Bhalerao Prasad DoifodeDokumen4 halamanPick and Place Robotic ARM Using PLC: Abhiraj Bhalerao Prasad DoifodeBilvanadham NBelum ada peringkat
- Train LocatinDokumen58 halamanTrain LocatinYonas AyanaBelum ada peringkat
- Sensing requirements for automated vehicles in highways and rural areasDokumen100 halamanSensing requirements for automated vehicles in highways and rural areassrijanBelum ada peringkat
- Advanced Parking SystemsDokumen24 halamanAdvanced Parking SystemsrajvritBelum ada peringkat
- Iot ApplicationsDokumen13 halamanIot ApplicationsPratul BatraBelum ada peringkat
- Master Thesis The Development of Autonomous VehiclesDokumen116 halamanMaster Thesis The Development of Autonomous Vehiclescristi_pet4742Belum ada peringkat
- Online News Portal Project in JavaDokumen2 halamanOnline News Portal Project in JavaTHE LIVING DEVILBelum ada peringkat
- IT Impact On TourismDokumen12 halamanIT Impact On TourismSudha Bhuvaneswari NarayanaswamyBelum ada peringkat
- Automated Car Parking System Commanded by Android ApplicationDokumen4 halamanAutomated Car Parking System Commanded by Android ApplicationArthur CarvalhoBelum ada peringkat
- Fleet Management Software A Complete Guide - 2020 EditionDari EverandFleet Management Software A Complete Guide - 2020 EditionBelum ada peringkat
- Robotic Arm Controlled by Human Arm MovementsDokumen6 halamanRobotic Arm Controlled by Human Arm MovementsSushanth KengunteBelum ada peringkat
- Toll Plaza Management Case Study NHAIDokumen4 halamanToll Plaza Management Case Study NHAIKenden Tshering0% (1)
- Autonomous VehiclesDokumen30 halamanAutonomous VehiclesAnil RV50% (4)
- Smart Cities Research 3Dokumen4 halamanSmart Cities Research 3Carlos Sánchez LópezBelum ada peringkat
- Future Supply Chains - Iot Perspective: Ise 707 - Fall 2016 - Assignment 3Dokumen10 halamanFuture Supply Chains - Iot Perspective: Ise 707 - Fall 2016 - Assignment 3SidBelum ada peringkat
- Automated VehiclesDokumen96 halamanAutomated Vehiclespvr2k1Belum ada peringkat
- PCET’S NMIET Autonomous Car SystemDokumen15 halamanPCET’S NMIET Autonomous Car SystemsohanBelum ada peringkat
- Autonomous Car: A.Sivanagaraju P.Naga SudhakarDokumen8 halamanAutonomous Car: A.Sivanagaraju P.Naga SudhakarSiva NagarajuBelum ada peringkat
- Overseeing Fleet Management A Complete Guide - 2020 EditionDari EverandOverseeing Fleet Management A Complete Guide - 2020 EditionBelum ada peringkat
- Android Mobile Application For Hospital ExecutivesDokumen53 halamanAndroid Mobile Application For Hospital ExecutivesBambang SujanarkoBelum ada peringkat
- My Research ProjectDokumen4 halamanMy Research Projectanon_783257142Belum ada peringkat
- System Development MethodologiesDokumen13 halamanSystem Development MethodologiesMay Ann Agcang SabelloBelum ada peringkat
- Applying Open Source Software to Adaptive TestingDokumen25 halamanApplying Open Source Software to Adaptive TestingCarlos AlvarezBelum ada peringkat
- ATM Simulation Full DoCumEntary With CodeDokumen141 halamanATM Simulation Full DoCumEntary With Codevaishnavi kadambariBelum ada peringkat
- Automatic Car Parking Indicator Using MicrocontrollerDokumen2 halamanAutomatic Car Parking Indicator Using MicrocontrollerReneesh Koya75% (4)
- Self-Driving GuidanceDokumen36 halamanSelf-Driving GuidanceJohana BhuiyanBelum ada peringkat
- Intelligent Traffic Light Control SystemDokumen18 halamanIntelligent Traffic Light Control Systemrockeysuseelan100% (1)
- An Interactive RFID-Based Bracelet For Airport Luggage Tracking SystemDokumen5 halamanAn Interactive RFID-Based Bracelet For Airport Luggage Tracking SystemNaveed BeighBelum ada peringkat
- CBTC Brochure 0Dokumen12 halamanCBTC Brochure 0Edwin SilvaBelum ada peringkat
- ParkingDokumen26 halamanParkingsana_sharma202080% (5)
- Contemporary Logistics in ChinaDokumen23 halamanContemporary Logistics in ChinaJavier RenizBelum ada peringkat
- Unit-I ADASDokumen93 halamanUnit-I ADASyash.salunkhe20Belum ada peringkat
- FinalDokumen20 halamanFinalAnnaBelum ada peringkat
- How Driverless Cars Will WorkDokumen14 halamanHow Driverless Cars Will WorkKshitij Sharma0% (1)
- Thesis Proposal - FPGA-Based Face Recognition System, by Poie - Nov 12, 2009Dokumen44 halamanThesis Proposal - FPGA-Based Face Recognition System, by Poie - Nov 12, 2009Poie100% (4)
- Automatic Car Parking Indicator SystemDokumen4 halamanAutomatic Car Parking Indicator SystemGokul KrishnanBelum ada peringkat
- BSIT (Evening) Final Year Projects Proposal Evaluation ReportDokumen3 halamanBSIT (Evening) Final Year Projects Proposal Evaluation ReportZeeshan BhattiBelum ada peringkat
- (796958755) Electronics & Semiconductor Market Research PDFDokumen10 halaman(796958755) Electronics & Semiconductor Market Research PDFAlex Hales PerryBelum ada peringkat
- ALSTOM Track Circuits 2011 12Dokumen16 halamanALSTOM Track Circuits 2011 12StTang0% (2)
- What Is MatlabDokumen5 halamanWhat Is Matlabyash143565Belum ada peringkat
- SUMO RobotDokumen20 halamanSUMO RobotMatt's Santouz CchildBelum ada peringkat
- SimulatedTrain Energy Consumption STECDokumen20 halamanSimulatedTrain Energy Consumption STECCarlos Redondo BenitezBelum ada peringkat
- AI in TransportationDokumen8 halamanAI in Transportationshivani khare100% (1)
- Modelling System Requirements With Use CaseDokumen45 halamanModelling System Requirements With Use CaseImam LutfiBelum ada peringkat
- Autonomous Cars Embedded Systems PDFDokumen7 halamanAutonomous Cars Embedded Systems PDFAswin PrEmrajBelum ada peringkat
- 1 Python: Approval II Abstract IIIDokumen48 halaman1 Python: Approval II Abstract IIIMilanBelum ada peringkat
- Documentation of Google Driverless Car 17593Dokumen29 halamanDocumentation of Google Driverless Car 17593Bhargav NanIEBelum ada peringkat
- Greater Hobart Urban Travel Demand ModelDokumen84 halamanGreater Hobart Urban Travel Demand ModelcitilabsBelum ada peringkat
- Introduction to Vision SystemsDokumen27 halamanIntroduction to Vision Systemsjul100% (1)
- Automated Car Parking SystemDokumen17 halamanAutomated Car Parking SystemMayank Dhull100% (2)
- Design & Implementation of An Autonomous ForkliftDokumen201 halamanDesign & Implementation of An Autonomous ForkliftShan Shaneesh50% (4)
- Electronic Bus Ticketing System (EBTSDokumen13 halamanElectronic Bus Ticketing System (EBTSChristina HarmonBelum ada peringkat
- UG - Mini Project - Drunk and Drive Detection SystemDokumen55 halamanUG - Mini Project - Drunk and Drive Detection SystemAarthi100% (2)
- Ship YardsDokumen9 halamanShip YardsRickson Viahul Rayan CBelum ada peringkat
- 88Dokumen3 halaman88Rickson Viahul Rayan CBelum ada peringkat
- 95Dokumen3 halaman95Rickson Viahul Rayan CBelum ada peringkat
- 98Dokumen2 halaman98Rickson Viahul Rayan CBelum ada peringkat
- 89Dokumen3 halaman89Rickson Viahul Rayan CBelum ada peringkat
- 90Dokumen3 halaman90Rickson Viahul Rayan CBelum ada peringkat
- 94 PDFDokumen3 halaman94 PDFRickson Viahul Rayan CBelum ada peringkat
- 91Dokumen3 halaman91Rickson Viahul Rayan CBelum ada peringkat
- 92Dokumen3 halaman92Rickson Viahul Rayan CBelum ada peringkat
- 96Dokumen3 halaman96Rickson Viahul Rayan CBelum ada peringkat
- Flareless Bite Type Fittings GuideDokumen24 halamanFlareless Bite Type Fittings GuideRickson Viahul Rayan CBelum ada peringkat
- Bulb Flats1Dokumen2 halamanBulb Flats1Constantine KtzmnBelum ada peringkat
- 97Dokumen3 halaman97Rickson Viahul Rayan CBelum ada peringkat
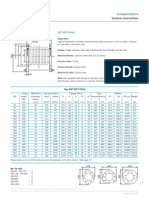
- Compensators: RX Kff2T Pn16Dokumen1 halamanCompensators: RX Kff2T Pn16Rickson Viahul Rayan CBelum ada peringkat
- Ship EquipmentDokumen3 halamanShip EquipmentviahulBelum ada peringkat
- 01-Hexagon Head BoltDokumen1 halaman01-Hexagon Head BoltTony AbrahamBelum ada peringkat
- Hoses and Accessories: RX KBF Ss/Ss Pn16Dokumen1 halamanHoses and Accessories: RX KBF Ss/Ss Pn16Rickson Viahul Rayan CBelum ada peringkat
- Ermeto CouplingDokumen9 halamanErmeto CouplingRickson Viahul Rayan CBelum ada peringkat
- Hoses and Accessories: RX KS-HP Pn40Dokumen1 halamanHoses and Accessories: RX KS-HP Pn40Rickson Viahul Rayan CBelum ada peringkat
- ErmetoDokumen28 halamanErmetoRickson Viahul Rayan C100% (1)
- Compensators: RX KSU PN2,5 - Exhaust Gas BellowDokumen1 halamanCompensators: RX KSU PN2,5 - Exhaust Gas BellowRickson Viahul Rayan CBelum ada peringkat
- Hoses and Accessories: RX KSG Pn16Dokumen2 halamanHoses and Accessories: RX KSG Pn16Rickson Viahul Rayan CBelum ada peringkat
- Hoses and Accessories: RX KS-HP Pn40Dokumen1 halamanHoses and Accessories: RX KS-HP Pn40Rickson Viahul Rayan CBelum ada peringkat
- Compensators: RX KFFT Pn16Dokumen1 halamanCompensators: RX KFFT Pn16Rickson Viahul Rayan CBelum ada peringkat
- Hoses and Accessories: RX KBF Ss/Ss Pn16Dokumen1 halamanHoses and Accessories: RX KBF Ss/Ss Pn16Rickson Viahul Rayan CBelum ada peringkat
- Hoses and Accessories: RX KST Pn16Dokumen1 halamanHoses and Accessories: RX KST Pn16Rickson Viahul Rayan CBelum ada peringkat
- Hoses and Accessories: RX KS2T PN16Dokumen1 halamanHoses and Accessories: RX KS2T PN16Rickson Viahul Rayan CBelum ada peringkat
- Compensators: RX KBFL Pn16Dokumen1 halamanCompensators: RX KBFL Pn16Rickson Viahul Rayan CBelum ada peringkat
- Acer Aspire 7110 9410 9420 - Wistron Myall2 - Rev MpsecDokumen57 halamanAcer Aspire 7110 9410 9420 - Wistron Myall2 - Rev MpsecCezar CarvalhoBelum ada peringkat
- Experiment 1 - Introduction To LVVL SoftwareDokumen9 halamanExperiment 1 - Introduction To LVVL SoftwareFaizal ZalBelum ada peringkat
- Datasheet Icl7135Dokumen14 halamanDatasheet Icl7135zelgadis445Belum ada peringkat
- DS 20221019 SG4400UD-MV-20 Datasheet V14 ENDokumen2 halamanDS 20221019 SG4400UD-MV-20 Datasheet V14 ENJosue Crespo GonzalezBelum ada peringkat
- Sensors and ActuatorsDokumen32 halamanSensors and ActuatorsSuci KadarsihBelum ada peringkat
- Tos 23101bmrl BDokumen2 halamanTos 23101bmrl BAnonymous Im6zx7xiyBelum ada peringkat
- 6MBI15GS-060: 600V / 15A 6 in One-PackageDokumen4 halaman6MBI15GS-060: 600V / 15A 6 in One-PackageVicencio MongeBelum ada peringkat
- Philips (LCD) Q552.4E LA PDFDokumen184 halamanPhilips (LCD) Q552.4E LA PDFMaya TesBelum ada peringkat
- Avr Ice200 Incircuit EmulatorDokumen2 halamanAvr Ice200 Incircuit Emulatorcarlos augusto do carmo braiaBelum ada peringkat
- Lab Report 3 v2Dokumen17 halamanLab Report 3 v2Andy LapianBelum ada peringkat
- 997 060160 1Dokumen2 halaman997 060160 1vitor4santos_6Belum ada peringkat
- Devs LogDokumen1.261 halamanDevs LogJames SniderBelum ada peringkat
- Program & Upload Firmware to MCB ControllersDokumen6 halamanProgram & Upload Firmware to MCB ControllersPeter SnellBelum ada peringkat
- Huawei Dualband Co-BCCH Cell IntroductionDokumen18 halamanHuawei Dualband Co-BCCH Cell IntroductionPaul Kabeya100% (2)
- Vishay Analog SwitchesDokumen24 halamanVishay Analog SwitchesMudassar RafiqBelum ada peringkat
- Transmitters PDFDokumen12 halamanTransmitters PDFsab100% (2)
- BLOWN UP - NetworkDokumen3 halamanBLOWN UP - NetworkArunabha DattaBelum ada peringkat
- Engineering Lab Explores Oscilloscope and DAC FundamentalsDokumen25 halamanEngineering Lab Explores Oscilloscope and DAC FundamentalsAndrew Park0% (1)
- Miqen Users Manual Ver 1.01Dokumen60 halamanMiqen Users Manual Ver 1.01Mustafa Kadir Yılmazer100% (1)
- Manual Avk enDokumen8 halamanManual Avk enali shetaBelum ada peringkat
- Resume Rohini Vaidya Embedded Systems EngineerDokumen3 halamanResume Rohini Vaidya Embedded Systems Engineeramit_telBelum ada peringkat
- NXa UPS 30 80 kVADokumen8 halamanNXa UPS 30 80 kVAquangBelum ada peringkat
- Unit 036 - Assembling and Testing Electronic CircuitsDokumen10 halamanUnit 036 - Assembling and Testing Electronic CircuitsDaved John100% (9)
- Cellular ConceptDokumen130 halamanCellular Conceptsanjeevsoni64Belum ada peringkat
- Quiz 2 SolutionDokumen5 halamanQuiz 2 SolutionRocker byBelum ada peringkat
- RF-6 ManualDokumen2 halamanRF-6 ManualjpgbfBelum ada peringkat
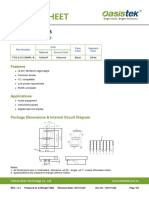
- Crystal Oscillators: Precise Timers at the Heart of ElectronicsDokumen11 halamanCrystal Oscillators: Precise Timers at the Heart of ElectronicsLorwin Ace EvoraBelum ada peringkat
- ASIC by Sebastian SmithDokumen506 halamanASIC by Sebastian SmithKiberleab TadesseBelum ada peringkat
- 1 - 1 PO - BT1002 - E01 - 1 GPON Technology Introduction 32p - 201308Dokumen25 halaman1 - 1 PO - BT1002 - E01 - 1 GPON Technology Introduction 32p - 201308ErnestoLopezGonzalezBelum ada peringkat
- PLC Programming Ladder Diagram Logic FunctionsDokumen10 halamanPLC Programming Ladder Diagram Logic FunctionsIbrahimBelum ada peringkat