Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Virtual Work 3rd Year Structural EngineeringDokumen129 halamanVirtual Work 3rd Year Structural EngineeringStefano Martin PorciunculaBelum ada peringkat
- Biological Materials Structure and PropertiesDokumen206 halamanBiological Materials Structure and PropertiesDulce Job BenitezBelum ada peringkat
- Maintenance of Mining MachineryDokumen22 halamanMaintenance of Mining Machineryjorgeluis2000100% (1)
- Present and Future of Flexible Automation Towards New Paradigms As A Modern Industrial Revolution To The Present and The FutureDokumen6 halamanPresent and Future of Flexible Automation Towards New Paradigms As A Modern Industrial Revolution To The Present and The Futuregedebe_koolBelum ada peringkat
- MEC 641 CFD Assignment 1 - Solving Linear Equations in MATLABDokumen3 halamanMEC 641 CFD Assignment 1 - Solving Linear Equations in MATLABgedebe_koolBelum ada peringkat
- Weekly Activities Record DATE: - / - /2015: 600-FKM (FYP1-LB /rev.0)Dokumen2 halamanWeekly Activities Record DATE: - / - /2015: 600-FKM (FYP1-LB /rev.0)gedebe_koolBelum ada peringkat
- 04782987Dokumen7 halaman04782987gedebe_koolBelum ada peringkat
- Labsheet 1 PneumaticDokumen4 halamanLabsheet 1 PneumaticAsma AmirahBelum ada peringkat
- Introduction LawDokumen2 halamanIntroduction Lawgedebe_koolBelum ada peringkat
- Mec 624 SummaryDokumen2 halamanMec 624 Summarygedebe_koolBelum ada peringkat
- SJAS Vol2 Issue8 004Dokumen11 halamanSJAS Vol2 Issue8 004gedebe_koolBelum ada peringkat
- Name: Muhamad Syamim Bin Zainordin 2012869576 Shahrul Akmar Bin Mohamad 2012253316 Shahrool Azree Bin Azlan 2012809436 Mohamad Azhar Bin Azmi 2012846518 Aina Arinah Binti MD Sabri 2012241616Dokumen2 halamanName: Muhamad Syamim Bin Zainordin 2012869576 Shahrul Akmar Bin Mohamad 2012253316 Shahrool Azree Bin Azlan 2012809436 Mohamad Azhar Bin Azmi 2012846518 Aina Arinah Binti MD Sabri 2012241616gedebe_koolBelum ada peringkat
- Determination of The Diffraction Intensity at Slit and Double Slit SystemsDokumen5 halamanDetermination of The Diffraction Intensity at Slit and Double Slit SystemsJose Galvan100% (1)
- Cyclotron: A Brief GuideDokumen11 halamanCyclotron: A Brief GuideasishBelum ada peringkat
- Mapua Institute of Technology: Field Work 1 Pacing On Level GroundDokumen7 halamanMapua Institute of Technology: Field Work 1 Pacing On Level GroundIan Ag-aDoctorBelum ada peringkat
- Partition Coefficients and Their UsesDokumen92 halamanPartition Coefficients and Their UsesquelenigBelum ada peringkat
- Long Term Deflection in Concrete BeamsDokumen6 halamanLong Term Deflection in Concrete BeamsRenganayagi BalajiBelum ada peringkat
- Temperature Regulator With Two Temperature SensorsDokumen2 halamanTemperature Regulator With Two Temperature SensorsSandi AslanBelum ada peringkat
- Centrifuges For The Chemical IndustryDokumen4 halamanCentrifuges For The Chemical IndustrypintaratBelum ada peringkat
- 9702 w04 QP 4Dokumen16 halaman9702 w04 QP 4api-3706826Belum ada peringkat
- Samuel Glasstone - Thermodynamics For Chemists PDFDokumen532 halamanSamuel Glasstone - Thermodynamics For Chemists PDFRimmon Singh100% (2)
- Inverse Time Characteristics RelaysDokumen1 halamanInverse Time Characteristics Relayssuperthambi100% (1)
- Phet ReflectionDokumen3 halamanPhet Reflectionapi-260335088Belum ada peringkat
- 2018 MunsellelectronicDokumen9 halaman2018 MunsellelectronicCristian Camilo Quitian MoralesBelum ada peringkat
- Renewableand Sustainable Energy ReviewsDokumen9 halamanRenewableand Sustainable Energy Reviewssundeep sBelum ada peringkat
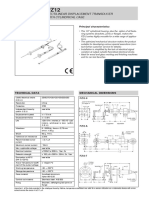
- Rectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical DimensionsDokumen2 halamanRectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical Dimensionsl561926Belum ada peringkat
- M.Prasad Naidu MSC Medical Biochemistry, PH.D Research ScholarDokumen31 halamanM.Prasad Naidu MSC Medical Biochemistry, PH.D Research ScholarDr. M. Prasad NaiduBelum ada peringkat
- Bhavans Public School, Doha - Qatar: Model Question Paper 2016-17 MathematicsDokumen4 halamanBhavans Public School, Doha - Qatar: Model Question Paper 2016-17 MathematicsSanthosh KrishnanBelum ada peringkat
- A Low Order System Frequency Response ModelDokumen10 halamanA Low Order System Frequency Response ModelNadil AminBelum ada peringkat
- Review of Literature On Probability of Detection For Liquid Penetrant Nondestructive TestingDokumen51 halamanReview of Literature On Probability of Detection For Liquid Penetrant Nondestructive TestingVicky GautamBelum ada peringkat
- Experimental Investigation of Process Parameters On Inconel 925 For EDM Process by Using Taguchi MethodDokumen6 halamanExperimental Investigation of Process Parameters On Inconel 925 For EDM Process by Using Taguchi MethodVishal Kumar JaiswalBelum ada peringkat
- Energy Balance Untuk Teknik KimiaDokumen19 halamanEnergy Balance Untuk Teknik Kimiamelisa amaliaBelum ada peringkat
- Revision Notes Grade 11Dokumen3 halamanRevision Notes Grade 11anuelisajoseBelum ada peringkat
- Abaqus Analysis User's Manual, 32.15 (User Elements)Dokumen22 halamanAbaqus Analysis User's Manual, 32.15 (User Elements)Elias BuBelum ada peringkat
- Astm A82 1979Dokumen6 halamanAstm A82 1979yoki_triwahyudiBelum ada peringkat
- Chapter 2 1 - Linear EquationsDokumen23 halamanChapter 2 1 - Linear Equationsapi-263209117Belum ada peringkat
- SOFTENING POINTDokumen8 halamanSOFTENING POINTSusi MulyaniBelum ada peringkat
- Math 115 HW #9 Solutions PDFDokumen7 halamanMath 115 HW #9 Solutions PDFHyan Gontijo0% (1)