Anda mungkin juga menyukai
- F2 - S01 - PPT - Cinemática Del Mas y PéndulosDokumen32 halamanF2 - S01 - PPT - Cinemática Del Mas y PéndulosDarwin Adanaque100% (1)
- MASDokumen21 halamanMASMG NickBelum ada peringkat
- Crucigramas numéricos de matemáticas (aritmetica y algebra)Dari EverandCrucigramas numéricos de matemáticas (aritmetica y algebra)Belum ada peringkat
- Pendulo SimpleDokumen9 halamanPendulo SimpleSindy Tatiana Mejia Sanchez (Estudiante)Belum ada peringkat
- Cinématica de Sistemas de ParticulasDokumen32 halamanCinématica de Sistemas de ParticulasJose Luis Buenrostro ChangBelum ada peringkat
- Oscilaciones masa-resorte y péndulo: Análisis con PhETDokumen8 halamanOscilaciones masa-resorte y péndulo: Análisis con PhETCristian Manuel Sierra JerezBelum ada peringkat
- Suseciones AritmeticasDokumen4 halamanSuseciones AritmeticasGarezBelum ada peringkat
- Proyecto Ascensor..Jaramillo Monteros Narvaez UlcuangoDokumen18 halamanProyecto Ascensor..Jaramillo Monteros Narvaez Ulcuangoriky1309Belum ada peringkat
- Cinemática rotacionalDokumen36 halamanCinemática rotacionalElmer BolañosBelum ada peringkat
- Ecuaciones DiferencialesDokumen15 halamanEcuaciones DiferencialesIsmael BenitezBelum ada peringkat
- Unmsm Laboratorio de Fisica I - InformeDokumen16 halamanUnmsm Laboratorio de Fisica I - InformeEdward MinianoBelum ada peringkat
- Estructuras IsostaticasDokumen13 halamanEstructuras IsostaticasALEJANDRO ulisesBelum ada peringkat
- Pract#4 Medidores de Deformación (Strain Gages)Dokumen18 halamanPract#4 Medidores de Deformación (Strain Gages)Ismael DiazBelum ada peringkat
- Seccion6 2Dokumen6 halamanSeccion6 2hansel huacasiBelum ada peringkat
- APE (Trabajo Energia y Potencia) 2020ABR-2020SEP. PDFDokumen8 halamanAPE (Trabajo Energia y Potencia) 2020ABR-2020SEP. PDFIlbar Johnny100% (1)
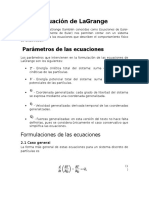
- Ecuacion LagrangeDokumen5 halamanEcuacion LagrangeMiguel Silva RiscoBelum ada peringkat
- S11 Momento de FuerzaDokumen14 halamanS11 Momento de Fuerzafrancisco100% (1)
- Ascensores Vivienda 8 NivelesDokumen11 halamanAscensores Vivienda 8 NivelesRuben RCBelum ada peringkat
- Principio de Conservación de La EnergíaDokumen10 halamanPrincipio de Conservación de La EnergíaDarkpancho MktwoBelum ada peringkat
- Entropía y NeguentropíaDokumen3 halamanEntropía y NeguentropíaJeffersonn UrreaBelum ada peringkat
- Cinetica Plana de Los Cuerpos RígidosDokumen48 halamanCinetica Plana de Los Cuerpos RígidosAngel Perez100% (5)
- Serie 1 (2020-1)Dokumen5 halamanSerie 1 (2020-1)Manzanilla Alvarez Carlos AlbertoBelum ada peringkat
- VIGAS: Fuerzas cortantes y momentos flexionantesDokumen15 halamanVIGAS: Fuerzas cortantes y momentos flexionantesMarcelo JacomeBelum ada peringkat
- Examen Dinamica 1.1 SalmaDokumen6 halamanExamen Dinamica 1.1 SalmaCesar Del AngelBelum ada peringkat
- Aplicaciones Tecnologicas de La Emision de Los AtomosDokumen4 halamanAplicaciones Tecnologicas de La Emision de Los AtomosMack NiktoshBelum ada peringkat
- 1 Calculo IntegralDokumen24 halaman1 Calculo IntegralHenry LazaroBelum ada peringkat
- Hoja de Ruta FinalDokumen12 halamanHoja de Ruta FinalFrank Lisboa AbadBelum ada peringkat
- Trabajo #2 de Metodo NumericosDokumen14 halamanTrabajo #2 de Metodo Numericoscarlos hernandezBelum ada peringkat
- Movimiento Armonico SimpleDokumen32 halamanMovimiento Armonico SimpleAlexa DelattibodierBelum ada peringkat
- Análisis estructural mediante matrices de rigidezDokumen276 halamanAnálisis estructural mediante matrices de rigidezYesy GonzalesBelum ada peringkat
- Reporte de Expocicion Variables SeparablesDokumen7 halamanReporte de Expocicion Variables SeparablesRafael TeranBelum ada peringkat
- Teorema de Maxwell-BettiDokumen4 halamanTeorema de Maxwell-BettiAngel RodriguezBelum ada peringkat
- Péndulo físico: Momento de inercia experimentalDokumen6 halamanPéndulo físico: Momento de inercia experimentalNicolas OlarteBelum ada peringkat
- Unidad 5 Calculo VectorialDokumen20 halamanUnidad 5 Calculo VectorialLucyanitaSuarecitaNBelum ada peringkat
- Practica 10 - Regresion LinealDokumen7 halamanPractica 10 - Regresion LinealSalvador DuranBelum ada peringkat
- Clase 01 Cinemática de Particulas Mov RectangularDokumen28 halamanClase 01 Cinemática de Particulas Mov RectangularCarolay CarrilloBelum ada peringkat
- 29.-Orden de Información (R.M)Dokumen2 halaman29.-Orden de Información (R.M)sonia huamán martelBelum ada peringkat
- Segunda Ley de NewtonDokumen7 halamanSegunda Ley de NewtonPaula Suarez100% (1)
- Movimiento armónico simple: características, ecuaciones y ejemplosDokumen19 halamanMovimiento armónico simple: características, ecuaciones y ejemplosAlejandro SanchezBelum ada peringkat
- Segunda Ley de Newton - FC - AD2018Dokumen42 halamanSegunda Ley de Newton - FC - AD2018Diego ArredondoBelum ada peringkat
- Cantidad de MovimientoDokumen36 halamanCantidad de MovimientoJosue LazoBelum ada peringkat
- Algoritmos y Leng Progrmacion Unidad 2 Agodic22Dokumen37 halamanAlgoritmos y Leng Progrmacion Unidad 2 Agodic22Luis Antonio CidBelum ada peringkat
- Momento de Segundo OrdenDokumen60 halamanMomento de Segundo OrdenronaldBelum ada peringkat
- Taller 2Dokumen6 halamanTaller 2Lucho MGBelum ada peringkat
- SistemasCoordenadasMecánicaClásicaDokumen12 halamanSistemasCoordenadasMecánicaClásicaVictor Osvaldo Bravo CuraBelum ada peringkat
- Proyecto 2 de Ecuaciones DiferencialesDokumen16 halamanProyecto 2 de Ecuaciones DiferencialesKaritOo HuarachaBelum ada peringkat
- Topicos Ingenieria EstructuralDokumen182 halamanTopicos Ingenieria EstructuralYaquelin Mamani CoilaBelum ada peringkat
- Biela Dinamica..!!!!!!!Dokumen7 halamanBiela Dinamica..!!!!!!!Franz C PorrasBelum ada peringkat
- Dibujo Industrial SIMBOLOGIADokumen11 halamanDibujo Industrial SIMBOLOGIAAmanda RobinsonBelum ada peringkat
- Metodo Fasorial1Dokumen11 halamanMetodo Fasorial1Pedro VillarroelBelum ada peringkat
- Vibraciones Con AmortiguamientoDokumen17 halamanVibraciones Con AmortiguamientoEleonaiBelum ada peringkat
- Clase 2 Esfuerzo y Deformacion en BarrasDokumen32 halamanClase 2 Esfuerzo y Deformacion en BarrasSebastian SanchezBelum ada peringkat
- G-2 U-2 Analisis Estructural 1 Mar Santiago José Miguel 17500076 PDFDokumen25 halamanG-2 U-2 Analisis Estructural 1 Mar Santiago José Miguel 17500076 PDFJosé Miguel MarBelum ada peringkat
- Conceptos Básicos de La Mecánica de Solidos.Dokumen16 halamanConceptos Básicos de La Mecánica de Solidos.Angela MahechaBelum ada peringkat
- Presentación de DespejesDokumen9 halamanPresentación de DespejesMaria J GimenezBelum ada peringkat
- Edp SeparablesDokumen5 halamanEdp SeparablesnidalsoukiBelum ada peringkat
- Movimiento Oscilatorio de Un Péndulo Simple 1Dokumen8 halamanMovimiento Oscilatorio de Un Péndulo Simple 1Franco Humberto Macuyama ArrisuenoBelum ada peringkat
- Teoría General de Esfuerzos - 5 Ejercicios Con Circulo de MohrDokumen10 halamanTeoría General de Esfuerzos - 5 Ejercicios Con Circulo de MohrAlberto S.Belum ada peringkat
- Aplicaciones Del Teorema de Simpson 1Dokumen22 halamanAplicaciones Del Teorema de Simpson 1Celi JLBelum ada peringkat
- Oscilador ArmónicoDokumen20 halamanOscilador ArmónicoDaniel MadridBelum ada peringkat
- Mastervodafone UpmDokumen103 halamanMastervodafone UpmGiordano Smith Alvarado RodriguezBelum ada peringkat
- Informe Final MPLSDokumen39 halamanInforme Final MPLSGiordano Smith Alvarado RodriguezBelum ada peringkat
- Temario Mayo 4to SecundariaDokumen1 halamanTemario Mayo 4to SecundariaGiordano Smith Alvarado RodriguezBelum ada peringkat
- It564m-Laboratorio de Telecomunicaciones 2 - Alvarado Rodriguez GiordanoDokumen10 halamanIt564m-Laboratorio de Telecomunicaciones 2 - Alvarado Rodriguez GiordanoGiordano Smith Alvarado RodriguezBelum ada peringkat
- Imprimir Sociedad DamasDokumen2 halamanImprimir Sociedad DamasGiordano Smith Alvarado RodriguezBelum ada peringkat
- SESION Funcion Real de Variable RealDokumen3 halamanSESION Funcion Real de Variable RealGiordano Smith Alvarado RodriguezBelum ada peringkat
- MODULO 1 - ALVARADO RODRIGUEZ GIORDANO - Resumen Del Libro Analysis of ITU Spectrum Recommendations in Latin America 2013Dokumen2 halamanMODULO 1 - ALVARADO RODRIGUEZ GIORDANO - Resumen Del Libro Analysis of ITU Spectrum Recommendations in Latin America 2013Giordano Smith Alvarado RodriguezBelum ada peringkat
- Sophia, la robot humanoide con ciudadaníaDokumen1 halamanSophia, la robot humanoide con ciudadaníaGiordano Smith Alvarado RodriguezBelum ada peringkat
- Imprimir Sociedad DamasDokumen2 halamanImprimir Sociedad DamasGiordano Smith Alvarado RodriguezBelum ada peringkat
- Ip4-It564m-Alvarado Rodriguez Giordano (Espectro Ensanchado)Dokumen4 halamanIp4-It564m-Alvarado Rodriguez Giordano (Espectro Ensanchado)Giordano Smith Alvarado RodriguezBelum ada peringkat
- SESION Funcion Real de Variable RealDokumen3 halamanSESION Funcion Real de Variable RealGiordano Smith Alvarado RodriguezBelum ada peringkat
- Sesion Matematica 09 - 11 de Mayo 2016 1Dokumen3 halamanSesion Matematica 09 - 11 de Mayo 2016 1Giordano Smith Alvarado Rodriguez100% (1)
- Ficha de Sesion 11Dokumen3 halamanFicha de Sesion 11Giordano Smith Alvarado RodriguezBelum ada peringkat
- Ip2 It564m Alvarado Rodriguez GiordanoDokumen8 halamanIp2 It564m Alvarado Rodriguez GiordanoGiordano Smith Alvarado RodriguezBelum ada peringkat
- Sesión 11 - 5to de Primaria - Criterios de DivisibilidadDokumen6 halamanSesión 11 - 5to de Primaria - Criterios de DivisibilidadGiordano Smith Alvarado Rodriguez100% (1)
- 02 Temario ABRILDokumen1 halaman02 Temario ABRILGiordano Smith Alvarado RodriguezBelum ada peringkat
- Sesión 10 - 5to de Primaria - Divisores de Un NúmeroDokumen5 halamanSesión 10 - 5to de Primaria - Divisores de Un NúmeroGiordano Smith Alvarado Rodriguez67% (3)
- Elecciones Municipio Escolar 2016Dokumen3 halamanElecciones Municipio Escolar 2016Giordano Smith Alvarado RodriguezBelum ada peringkat
- Sesión 08 - 5to de Primaria - Operaciones CombinadasDokumen6 halamanSesión 08 - 5to de Primaria - Operaciones CombinadasGiordano Smith Alvarado Rodriguez56% (9)
- Sesión 05 - 5to de Primaria - PotenciaciónDokumen10 halamanSesión 05 - 5to de Primaria - PotenciaciónGiordano Smith Alvarado Rodriguez100% (4)
- Sesión 09 - 5to de Primaria - Múltiplos de Un NúmeroDokumen6 halamanSesión 09 - 5to de Primaria - Múltiplos de Un NúmeroGiordano Smith Alvarado Rodriguez75% (4)
- Sesión 04 - 5to de Primaria - MultiplicaciónDokumen12 halamanSesión 04 - 5to de Primaria - MultiplicaciónGiordano Smith Alvarado RodriguezBelum ada peringkat
- Como Trabajar La Escritura Con Nuestros EstudiantesDokumen28 halamanComo Trabajar La Escritura Con Nuestros EstudiantesTechy Fajardo100% (1)
- Sesión 02 - 5to de Primaria - Relación de OrdenDokumen7 halamanSesión 02 - 5to de Primaria - Relación de OrdenGiordano Smith Alvarado RodriguezBelum ada peringkat
- Sesión 03 - 5to de Primaria - Adición y Sustracción de Números NaturalesDokumen13 halamanSesión 03 - 5to de Primaria - Adición y Sustracción de Números NaturalesGiordano Smith Alvarado Rodriguez100% (8)
- Tutorial PC Simu, s7-200 y Microwin BymarshallDokumen8 halamanTutorial PC Simu, s7-200 y Microwin BymarshallfenixflyBelum ada peringkat
- Sesión 01 - 5to de Primaria - Sistema de Numeración DecimalDokumen6 halamanSesión 01 - 5to de Primaria - Sistema de Numeración DecimalGiordano Smith Alvarado Rodriguez0% (2)
- Sesión 07 - 5to de Primaria - División IIDokumen15 halamanSesión 07 - 5to de Primaria - División IIGiordano Smith Alvarado Rodriguez50% (4)
- Intell Bach1 ProfDokumen255 halamanIntell Bach1 ProfGiordano Smith Alvarado Rodriguez100% (1)
- Examen 1er AnioDokumen5 halamanExamen 1er AnioRixi Flores FloresBelum ada peringkat
- Prueba Evaluación Diagnostica CCSS 2° GradoDokumen5 halamanPrueba Evaluación Diagnostica CCSS 2° GradoReginalda Silva dazaBelum ada peringkat
- Tema 35 La Época de Los Valentinianos y TeodosioDokumen9 halamanTema 35 La Época de Los Valentinianos y TeodosioFran Baena SanchezBelum ada peringkat
- P 1 Presion USMP 2021Dokumen60 halamanP 1 Presion USMP 2021JESSELY ROSALÍ MUÑOZ NEYRA100% (1)
- Ley 28008 Ley de Los Delitos AduanerosDokumen7 halamanLey 28008 Ley de Los Delitos AduanerosDaniela Salas CastroBelum ada peringkat
- Franck-Hertz experimento cuantización energía átomos mercurioDokumen6 halamanFranck-Hertz experimento cuantización energía átomos mercuriojimena3330Belum ada peringkat
- Ajustes de Programa de Jovenes y Su ImplementacionDokumen32 halamanAjustes de Programa de Jovenes y Su ImplementacionGerardo Alberto Lugo Gámez67% (3)
- Sabes Qué Es Un SapiosexualDokumen3 halamanSabes Qué Es Un SapiosexualEl_BohemioBelum ada peringkat
- Catálogo de memes para la historia educativa de MéxicoDokumen18 halamanCatálogo de memes para la historia educativa de MéxicoChko Saldaña0% (1)
- Resumen de Criminalistica y CriminologiaDokumen3 halamanResumen de Criminalistica y CriminologiaVisaelASBelum ada peringkat
- Escala Cuantitativa Snap-IVDokumen3 halamanEscala Cuantitativa Snap-IVCarmenBelum ada peringkat
- Cuestionario para Mapa Perceptual - Pasta DentalDokumen3 halamanCuestionario para Mapa Perceptual - Pasta DentalfeccjpBelum ada peringkat
- Mapa Gerencia y AdministracionDokumen3 halamanMapa Gerencia y AdministracionGianella Guerra CruzBelum ada peringkat
- Compresión y tolerancia para una sociedad justaDokumen3 halamanCompresión y tolerancia para una sociedad justaYamila Camargo MoralesBelum ada peringkat
- Cap 200920 PERU20 PROGRAMA20 JUNTOSDokumen44 halamanCap 200920 PERU20 PROGRAMA20 JUNTOSAngela Florez SotoBelum ada peringkat
- Automatización de Procesos AdministrativosDokumen9 halamanAutomatización de Procesos AdministrativosBryan LimaBelum ada peringkat
- P. Ya Galperin 21-11-13Dokumen16 halamanP. Ya Galperin 21-11-13Rafael Gaviria AguilaBelum ada peringkat
- 1.-Esquema Coro Cantos Misa Tiempo Ordinario 1Dokumen1 halaman1.-Esquema Coro Cantos Misa Tiempo Ordinario 1Gerardo MartinezBelum ada peringkat
- Trabajo de Sistema Mecanizado II ProyectoDokumen5 halamanTrabajo de Sistema Mecanizado II Proyectomeche2212Belum ada peringkat
- El Evangelio de San MarcosDokumen4 halamanEl Evangelio de San MarcosFenriZzBelum ada peringkat
- Monografía de XochimilcoDokumen40 halamanMonografía de Xochimilcozac_kuk100% (4)
- Teoria de La Justicia y Velo de Ignorancia RalwsDokumen6 halamanTeoria de La Justicia y Velo de Ignorancia RalwsJuan Carlos Caicedo MolinaBelum ada peringkat
- Cita Textual FrankleònDokumen6 halamanCita Textual FrankleònFrankLeonBelum ada peringkat
- Desarriollo y Ha Unidad 4Dokumen11 halamanDesarriollo y Ha Unidad 4Marylu GonzalezBelum ada peringkat
- Manual de buenas prácticas agencias viajes turismoDokumen81 halamanManual de buenas prácticas agencias viajes turismoTania Dueñas OtoyaBelum ada peringkat
- Plan Mejoramiento - Geometría 8°Dokumen3 halamanPlan Mejoramiento - Geometría 8°Ana Bedoya DíazBelum ada peringkat
- Evasión de Las Defensas Del AnfitriónDokumen4 halamanEvasión de Las Defensas Del AnfitriónNadiuska MolinaresBelum ada peringkat
- Angulos Complementarios y Suplementarios 6°Dokumen3 halamanAngulos Complementarios y Suplementarios 6°Pamela Gonzalez RomeroBelum ada peringkat
- Trabajo de La Cultura Taina y DominicanaDokumen28 halamanTrabajo de La Cultura Taina y DominicanaBhakti RBelum ada peringkat
- Credidimus Caritati 14. Monseñor Lefebvre: 1º Nuestro Señor Ha Vencido Al MundoDokumen4 halamanCredidimus Caritati 14. Monseñor Lefebvre: 1º Nuestro Señor Ha Vencido Al MundoMaria de Lourdes SoajeBelum ada peringkat
- Mascarilla C TRACKDokumen6 halamanMascarilla C TRACKDragneel Angel D. LelouchBelum ada peringkat