Anda mungkin juga menyukai
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Flexure Formula ProjectDokumen11 halamanFlexure Formula ProjectkumeshinBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Two-Phase Pressure Drop: October 2015Dokumen37 halamanTwo-Phase Pressure Drop: October 2015Vimal RajBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Metallic: Standard Test MethodsDokumen30 halamanMetallic: Standard Test MethodsG AzBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Dental WaxesDokumen82 halamanDental WaxesVimalKumar100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Casing Deformation From Fracture Slip in - 2018 - Journal of Petroleum ScienceDokumen7 halamanCasing Deformation From Fracture Slip in - 2018 - Journal of Petroleum ScienceBest OctavianBelum ada peringkat
- Pipe Saddle Support CalculationsDokumen1 halamanPipe Saddle Support CalculationsAbir Baran HandaBelum ada peringkat
- AER210H1 - 20179 - 641514146466chapter 1 - Introduction To Fluids Exercise QuestionsDokumen6 halamanAER210H1 - 20179 - 641514146466chapter 1 - Introduction To Fluids Exercise QuestionsVivek SinghBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Module 02 PhysicsDokumen166 halamanModule 02 PhysicsSabeeka BatoulBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
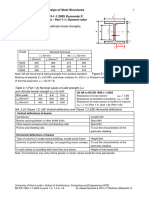
- Tabels Extracts From Eurocode 3Dokumen12 halamanTabels Extracts From Eurocode 3hisham.alazzaniBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Assignment 7 PDFDokumen24 halamanAssignment 7 PDFSisindri BangaruBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- MES Service ManualDokumen141 halamanMES Service ManualvictorhernandezregaBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Bis Is 7746 - 1991 (Reaffirmed 2020) - Code of Practice For In-Situ Shear Test On RockDokumen11 halamanBis Is 7746 - 1991 (Reaffirmed 2020) - Code of Practice For In-Situ Shear Test On RockArpan NandyBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- ME 1302 - MACHINE DESIGN (5th Mech)Dokumen7 halamanME 1302 - MACHINE DESIGN (5th Mech)Madhu MithaBelum ada peringkat
- Strength of MaterialsDokumen18 halamanStrength of Materialskurddoski28Belum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- ACI STRUCTURAL JOURNAL-Highly Damage-Tolerant Beam-Column Joints Through UseDokumen9 halamanACI STRUCTURAL JOURNAL-Highly Damage-Tolerant Beam-Column Joints Through UseMuchtar SufaatBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Code of Practice Concrete Structures ForDokumen18 halamanCode of Practice Concrete Structures ForE Hammam El MissiryBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Homework: 5: . " . " The Following Is The Output of The KENPAVE SoftwareDokumen17 halamanHomework: 5: . " . " The Following Is The Output of The KENPAVE SoftwareRobel TeweldeBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Mechanical Properties of SolidsDokumen37 halamanMechanical Properties of SolidsRahul PugazhendiBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Lecture 06 Mechanical PropertiesDokumen24 halamanLecture 06 Mechanical Propertiesantoine demeireBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Tentang Pondasi Rigid, Fleksibel, Di Clay, Dan PasirDokumen2 halamanTentang Pondasi Rigid, Fleksibel, Di Clay, Dan Pasirryan rakhmat setiadiBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Static and Dynamic Analysis of Composite Propeller of Ship Using FEADokumen8 halamanStatic and Dynamic Analysis of Composite Propeller of Ship Using FEAAstekMaddenBelum ada peringkat
- Splice Connection - Full CapacityDokumen14 halamanSplice Connection - Full Capacitykalpanaadhi75% (4)
- Dam Deformation-2Dokumen20 halamanDam Deformation-2Fajar A KurniawanBelum ada peringkat
- Analysis, Simulation and Comparison of An Exoskeleton For Rehabilitation of Lower Limbs Using Different Materials For Its ManufactureDokumen5 halamanAnalysis, Simulation and Comparison of An Exoskeleton For Rehabilitation of Lower Limbs Using Different Materials For Its ManufactureSantos CarlosBelum ada peringkat
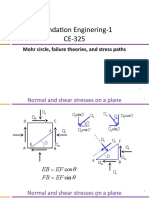
- CE325 - 01 Mohr Circle and Failure TheoriesDokumen38 halamanCE325 - 01 Mohr Circle and Failure TheoriesRobert PrinceBelum ada peringkat
- ANSYS® ASAS™ Version 14.04 ANSYS® AQWA™ Version 5.7A Femsys™ FEMGV™ Version 7.0-05 Release NotesDokumen12 halamanANSYS® ASAS™ Version 14.04 ANSYS® AQWA™ Version 5.7A Femsys™ FEMGV™ Version 7.0-05 Release Notesbr1404Belum ada peringkat
- Analytical Behavior of Concrete-Encased CFST Columns Under Cyclic Lateral Loading, 2016 (Wei-Wu Qian)Dokumen15 halamanAnalytical Behavior of Concrete-Encased CFST Columns Under Cyclic Lateral Loading, 2016 (Wei-Wu Qian)Phan Đào Hoàng Hiệp100% (1)
- Dental Cements For Bonding ApplicationDokumen21 halamanDental Cements For Bonding ApplicationFoysal SirazeeBelum ada peringkat
- 1.introduction To DesignDokumen81 halaman1.introduction To Designram81422Belum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Verification of Anchoring in Foundations of Wind TDokumen14 halamanVerification of Anchoring in Foundations of Wind TManoj PradhanBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)