Anda mungkin juga menyukai
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1091)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Intro To Modeling (CMM)Dokumen36 halamanIntro To Modeling (CMM)api-3773589Belum ada peringkat
- Routine Odd Sem 2019-20 FinalDokumen4 halamanRoutine Odd Sem 2019-20 FinalZiyaul HodaBelum ada peringkat
- NCERT Solutions For Class 6 Maths Chapter 8 DecimalsDokumen23 halamanNCERT Solutions For Class 6 Maths Chapter 8 DecimalsABYAN ShaikBelum ada peringkat
- Random Number GenerationDokumen13 halamanRandom Number GenerationSimarpreet Singh100% (1)
- Smith KJ Student Mathematics Handbook and Integral Table ForDokumen328 halamanSmith KJ Student Mathematics Handbook and Integral Table ForStrahinja DonicBelum ada peringkat
- Digital SignatureDokumen49 halamanDigital SignatureVishal LodhiBelum ada peringkat
- 100 Quant FactsDokumen8 halaman100 Quant FactsCharlie GoyalBelum ada peringkat
- Grade 7 Quarter 1 Written Work # 1Dokumen4 halamanGrade 7 Quarter 1 Written Work # 1Junly Jeff Negapatan100% (1)
- Digital Logic PDFDokumen74 halamanDigital Logic PDFWyky Un-NaunBelum ada peringkat
- Cambridge International General Certificate of Secondary EducationDokumen16 halamanCambridge International General Certificate of Secondary Educationprathamkumar8374Belum ada peringkat
- JddumpsDokumen58 halamanJddumpsDeepa SureshBelum ada peringkat
- Effect of Axial Load Mode Shapes A N D Frequencies BeamsDokumen33 halamanEffect of Axial Load Mode Shapes A N D Frequencies BeamsYoyok SetyoBelum ada peringkat
- Diagnosis: Highlights: Cita Rosita Sigit PrakoeswaDokumen68 halamanDiagnosis: Highlights: Cita Rosita Sigit PrakoeswaAdniana NareswariBelum ada peringkat
- 0607 s10 QP 2Dokumen12 halaman0607 s10 QP 2Amalia KorakakiBelum ada peringkat
- EzIdentity MFA-TechnicalWriteupDokumen20 halamanEzIdentity MFA-TechnicalWriteupVikram SareenBelum ada peringkat
- Account Mapping Transformation FileDokumen174 halamanAccount Mapping Transformation FileIrvandias AnggriawanBelum ada peringkat
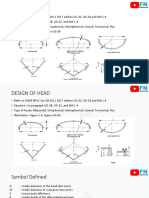
- Design of Formed VesselDokumen16 halamanDesign of Formed VesselTito FebriantoBelum ada peringkat
- Capital BugetingDokumen6 halamanCapital BugetingMichael ReyesBelum ada peringkat
- DepressionnnDokumen5 halamanDepressionnnMilkie MangaoilBelum ada peringkat
- HANAtization Checklist v1.0Dokumen14 halamanHANAtization Checklist v1.0topankajsharmaBelum ada peringkat
- PTM Phy F.4.Ch.2.4Dokumen13 halamanPTM Phy F.4.Ch.2.4Bazil BoliaBelum ada peringkat
- First Order Differentiate PDFDokumen21 halamanFirst Order Differentiate PDFDharamBelum ada peringkat
- Integrals of Differential Binomials and Chebyshev's CriterionDokumen4 halamanIntegrals of Differential Binomials and Chebyshev's CriterionEnrique GonzalezBelum ada peringkat
- A Scheduling Approach For Ship Design Project With Fields Constraint in Tasks and Human ResourcesDokumen6 halamanA Scheduling Approach For Ship Design Project With Fields Constraint in Tasks and Human ResourcesavciahmBelum ada peringkat
- Naac Lesson Plan Subject-WsnDokumen6 halamanNaac Lesson Plan Subject-WsnAditya Kumar TikkireddiBelum ada peringkat
- MSC - Patran Results PrimerDokumen138 halamanMSC - Patran Results PrimeralfredaoudeBelum ada peringkat
- Plate Element Stress - MX - My Vs Global Moment - Bentley - STAAD Products - Eng-TipsDokumen2 halamanPlate Element Stress - MX - My Vs Global Moment - Bentley - STAAD Products - Eng-Tipssom_bs79100% (1)
- Steel: Statistical Analysis of Steel FormabilityDokumen12 halamanSteel: Statistical Analysis of Steel FormabilitynadhabindhuBelum ada peringkat
- FPGA Implementation of CORDIC Processor: September 2013Dokumen65 halamanFPGA Implementation of CORDIC Processor: September 2013lordaranorBelum ada peringkat
- Open Channel Flow Resistance - Ben Chie Yen - 2002 PDFDokumen20 halamanOpen Channel Flow Resistance - Ben Chie Yen - 2002 PDFAndres Granados100% (2)