Anda mungkin juga menyukai
- Lecture Notes CT 4145Dokumen132 halamanLecture Notes CT 4145Shashank BabuBelum ada peringkat
- Tugas 1Dokumen22 halamanTugas 1Tiara OktavianiBelum ada peringkat
- Vibration Dynamics PDFDokumen41 halamanVibration Dynamics PDFvbhvmht09Belum ada peringkat
- Basics of Vibration DynamicsDokumen41 halamanBasics of Vibration DynamicsPrashanth Babu.KBelum ada peringkat
- Collection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyDari EverandCollection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyPenilaian: 3 dari 5 bintang3/5 (2)
- Structural Dynamics and Earthquake EngineeringDokumen76 halamanStructural Dynamics and Earthquake EngineeringGerman ToledoBelum ada peringkat
- Structural Dynamics of Earthquake Resistant BuildingsDokumen13 halamanStructural Dynamics of Earthquake Resistant BuildingsAnil KadbhaneBelum ada peringkat
- Unesco-Eolss Sample Chapters: Structural DynamicsDokumen12 halamanUnesco-Eolss Sample Chapters: Structural DynamicsMohara NascimentoBelum ada peringkat
- Basics of Dynamics and Aseismic Design TheoryDokumen24 halamanBasics of Dynamics and Aseismic Design TheoryVennila GBelum ada peringkat
- 12.005 Lecture Notes 1: Mechanics: The Study of The Motion of Matter and The Forces That Cause Such MotionDokumen9 halaman12.005 Lecture Notes 1: Mechanics: The Study of The Motion of Matter and The Forces That Cause Such MotionOndina PopescuBelum ada peringkat
- FCE 401 Chapter 1 and 2Dokumen34 halamanFCE 401 Chapter 1 and 2carl ingariBelum ada peringkat
- Damped Mechanical Oscillations: Mass, M Spring (Stiffness, K) XDokumen8 halamanDamped Mechanical Oscillations: Mass, M Spring (Stiffness, K) XEpic WinBelum ada peringkat
- Overview of Dynamical SystemsDokumen8 halamanOverview of Dynamical SystemsAbdel DaaBelum ada peringkat
- Types of Damping 1. Viscous DampingDokumen6 halamanTypes of Damping 1. Viscous DampingZandro GagoteBelum ada peringkat
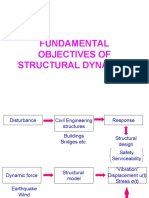
- Fundamental Objectives of Structural DynamicsDokumen11 halamanFundamental Objectives of Structural DynamicsikramBelum ada peringkat
- Structural DynamicsDokumen63 halamanStructural DynamicsthakrarhitsBelum ada peringkat
- Lecture 1623481301Dokumen146 halamanLecture 1623481301mebratuhailu674Belum ada peringkat
- Dynamics Equations and ForcesDokumen53 halamanDynamics Equations and Forcesparmeshwar khendakeBelum ada peringkat
- Mechanical Vibrations - Theory And Application - An Introduction To Practical Dynamic Engineering Problems In The Structural FieldDari EverandMechanical Vibrations - Theory And Application - An Introduction To Practical Dynamic Engineering Problems In The Structural FieldBelum ada peringkat
- Lecture Notes - Linear Elasticity TheoryDokumen43 halamanLecture Notes - Linear Elasticity Theoryzcapg17Belum ada peringkat
- Earth Quake EngineeringDokumen6 halamanEarth Quake Engineeringbabu1434Belum ada peringkat
- Types of Response and VibrationsDokumen40 halamanTypes of Response and VibrationsGaluh Ayu PBelum ada peringkat
- Basics of Vibration DynamicsDokumen41 halamanBasics of Vibration DynamicshahahaBelum ada peringkat
- Lecture Notes CT 4145Dokumen132 halamanLecture Notes CT 4145mohdsolihat1Belum ada peringkat
- Introduction To Finite Elements (Matrix Methods)Dokumen46 halamanIntroduction To Finite Elements (Matrix Methods)Paulo FidelisBelum ada peringkat
- Equations of MotionDokumen6 halamanEquations of MotionDharshan KofiBelum ada peringkat
- Chapter 3 - Free Damped Vibrations - Mechanical VibrationsDokumen21 halamanChapter 3 - Free Damped Vibrations - Mechanical Vibrationsumangthechamp100% (1)
- Structural DynamicsDokumen63 halamanStructural DynamicsElena Baciu100% (3)
- A Theory of Turbulence: Decomposing Velocity FluctuationsDokumen218 halamanA Theory of Turbulence: Decomposing Velocity FluctuationsBhertrand GomesBelum ada peringkat
- ANSYS Static & Dynamic Analysis in <40 CharsDokumen5 halamanANSYS Static & Dynamic Analysis in <40 CharstarasasankaBelum ada peringkat
- What is Engineering Earthquake TippingDokumen3 halamanWhat is Engineering Earthquake TippingJack FosterBelum ada peringkat
- Structural Dynamics, Therefore, Is A Type ofDokumen5 halamanStructural Dynamics, Therefore, Is A Type ofntah84Belum ada peringkat
- Dynamics - Lecture Notes: Chris White (C.white@physics - Gla.ac - Uk)Dokumen44 halamanDynamics - Lecture Notes: Chris White (C.white@physics - Gla.ac - Uk)Saravana ArunBelum ada peringkat
- Seismic Design BasicsDokumen5 halamanSeismic Design BasicsMelvin MagbanuaBelum ada peringkat
- Experiment#01Dokumen6 halamanExperiment#01Shahid KamranBelum ada peringkat
- Continuum Mechanics SS 2013Dokumen45 halamanContinuum Mechanics SS 2013zcapg17Belum ada peringkat
- Concept of Response SpectrumDokumen74 halamanConcept of Response Spectrumahumanbeing108Belum ada peringkat
- July 28 - Introduction To Structural Dynamics Dr. HW Huang PDFDokumen52 halamanJuly 28 - Introduction To Structural Dynamics Dr. HW Huang PDFurvishBelum ada peringkat
- SCIA5202Dokumen67 halamanSCIA52022BA19CV059 Rakshita SarangmathBelum ada peringkat
- Interpreting Complex PDFDokumen9 halamanInterpreting Complex PDFletter_ashish4444Belum ada peringkat
- Multimodal Map and Complex Basin of a Simple HopperDokumen13 halamanMultimodal Map and Complex Basin of a Simple HopperLouerrad MoussaBelum ada peringkat
- CE 73 Basic Dynamics and Aseismic DesignDokumen32 halamanCE 73 Basic Dynamics and Aseismic DesignarunachelamBelum ada peringkat
- EQ Engg 5Dokumen39 halamanEQ Engg 5umairBelum ada peringkat
- Lifting AnalysisDokumen14 halamanLifting Analysisruhul72Belum ada peringkat
- MCE312 (Module 1)Dokumen32 halamanMCE312 (Module 1)Muiruri JacobBelum ada peringkat
- Dynamic Force Analysis & Vibration in Machines Workshop at KauveryDokumen132 halamanDynamic Force Analysis & Vibration in Machines Workshop at KauveryMoorthy GovindarajBelum ada peringkat
- Dynamic Crosswind Fatigue of Slender Vertical Structures: Wind and Structures, Vol. 5, No. 6 (2002) 527-542Dokumen16 halamanDynamic Crosswind Fatigue of Slender Vertical Structures: Wind and Structures, Vol. 5, No. 6 (2002) 527-542OkayBelum ada peringkat
- Appendices Seismic Guide 100518Dokumen83 halamanAppendices Seismic Guide 100518Vladimir Sánchez CalderónBelum ada peringkat
- A Course of Mathematics for Engineers and Scientists: Volume 3: Theoretical MechanicsDari EverandA Course of Mathematics for Engineers and Scientists: Volume 3: Theoretical MechanicsPenilaian: 1 dari 5 bintang1/5 (1)
- Sec. 1.8 Problem Statement and Element ForcesDokumen1 halamanSec. 1.8 Problem Statement and Element ForcesMehdi RahmatiBelum ada peringkat
- Structural Dynamics 構造動力学Dokumen16 halamanStructural Dynamics 構造動力学rusvelthchristianBelum ada peringkat
- Unit I PDFDokumen15 halamanUnit I PDFarunachelamBelum ada peringkat
- A First Course in Rational Continuum Mechanics V1Dari EverandA First Course in Rational Continuum Mechanics V1Belum ada peringkat
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11Dari EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Belum ada peringkat
- Att 2699Dokumen189 halamanAtt 2699LukasPodolskiBelum ada peringkat
- Abaqus Tutorial 1 Basic BracketDokumen17 halamanAbaqus Tutorial 1 Basic BracketAbdel DaaBelum ada peringkat
- Chapter 5Dokumen4 halamanChapter 5Amer Ben KhalifaBelum ada peringkat
- Fem MeshingDokumen80 halamanFem MeshingBolarinwa100% (1)
- FEA in Practice - 2011 (Instructor Manual)Dokumen266 halamanFEA in Practice - 2011 (Instructor Manual)vnishawala100% (1)
- ME101 Lecture01 KDDokumen33 halamanME101 Lecture01 KDbmhshBelum ada peringkat
- Radioss Theory Manual: 10.0 Version - January 2009 Large Displacement Finite Element AnalysisDokumen179 halamanRadioss Theory Manual: 10.0 Version - January 2009 Large Displacement Finite Element AnalysisAbdel DaaBelum ada peringkat
- Plane Kinematics of Rigid Bodies: 2141263 Dynamics & Vibrations, NAVDokumen15 halamanPlane Kinematics of Rigid Bodies: 2141263 Dynamics & Vibrations, NAVAbdel DaaBelum ada peringkat
- Save Views in The Model Browser: Topic DetailsDokumen2 halamanSave Views in The Model Browser: Topic DetailsAbdel DaaBelum ada peringkat
- A Tutorial: Using Additional Techniques To Create and Analyze A ModelDokumen55 halamanA Tutorial: Using Additional Techniques To Create and Analyze A ModelMohammed Abu SufianBelum ada peringkat
- Adv Surface Design R20 EVALDokumen60 halamanAdv Surface Design R20 EVALa7254223Belum ada peringkat
- HW3,4 Due 02 18 09Dokumen1 halamanHW3,4 Due 02 18 09Abdel DaaBelum ada peringkat
- Vex Unit 02Dokumen44 halamanVex Unit 02Dhanaraj RamachandranBelum ada peringkat
- Engineering DrawingDokumen240 halamanEngineering DrawingKhelly Shan C. Sta. RitaBelum ada peringkat
- NuCast SlidesDokumen35 halamanNuCast SlidesAbdel DaaBelum ada peringkat
- # 1070: To Generate HTML Mesh Quality Report: Topic ObjectiveDokumen3 halaman# 1070: To Generate HTML Mesh Quality Report: Topic ObjectiveAbdel DaaBelum ada peringkat
- Finite Element AnalysisDokumen25 halamanFinite Element AnalysisAnonymous lV8E5mEOBelum ada peringkat
- Lexical FieldsDokumen1 halamanLexical FieldsAbdel DaaBelum ada peringkat
- Solid TrimDokumen2 halamanSolid TrimAbdel DaaBelum ada peringkat
- Iast Lect01Dokumen12 halamanIast Lect01Abdel DaaBelum ada peringkat
- Advanced: CATIA V5 WorkbookDokumen44 halamanAdvanced: CATIA V5 Workbookemiliyonk100% (1)
- # 1070: To Generate HTML Mesh Quality Report: Topic ObjectiveDokumen3 halaman# 1070: To Generate HTML Mesh Quality Report: Topic ObjectiveAbdel DaaBelum ada peringkat
- Prepositions exercise: fill in the blanksDokumen2 halamanPrepositions exercise: fill in the blanksAbdel DaaBelum ada peringkat
- PT Test 1 Part 7-12072012021713Dokumen19 halamanPT Test 1 Part 7-12072012021713Abdel DaaBelum ada peringkat
- Toeic G 122309Dokumen10 halamanToeic G 122309Abdel DaaBelum ada peringkat
- 2009-04 ToiecDokumen23 halaman2009-04 ToiecTran Thi Kim Anh100% (1)
- Vocabulary 5Dokumen8 halamanVocabulary 5Guez YoBelum ada peringkat
- Prepositions exercise: fill in the blanksDokumen2 halamanPrepositions exercise: fill in the blanksAbdel DaaBelum ada peringkat
- Reading Texts (Time-Consuming: Be Quick !)Dokumen1 halamanReading Texts (Time-Consuming: Be Quick !)Abdel DaaBelum ada peringkat
- Entrepreneurship Style - MakerDokumen1 halamanEntrepreneurship Style - Makerhemanthreddy33% (3)
- Model S-20 High Performance Pressure Transmitter For General Industrial ApplicationsDokumen15 halamanModel S-20 High Performance Pressure Transmitter For General Industrial ApplicationsIndra PutraBelum ada peringkat
- Weka Tutorial 2Dokumen50 halamanWeka Tutorial 2Fikri FarisBelum ada peringkat
- Overall Dimensions and Mounting: Solar Water Pump Controller Mu - G3 Solar Mu - G5 Solar Mu - G7.5 Solar Mu - G10 SolarDokumen2 halamanOverall Dimensions and Mounting: Solar Water Pump Controller Mu - G3 Solar Mu - G5 Solar Mu - G7.5 Solar Mu - G10 SolarVishak ThebossBelum ada peringkat
- Rencana Pembelajaran Semester Sistem Navigasi ElektronikDokumen16 halamanRencana Pembelajaran Semester Sistem Navigasi ElektronikLastri AniBelum ada peringkat
- 7458-PM Putting The Pieces TogetherDokumen11 halaman7458-PM Putting The Pieces Togethermello06Belum ada peringkat
- EU Letter To Liz Truss 2016Dokumen2 halamanEU Letter To Liz Truss 2016MadeleineBelum ada peringkat
- Distribution of Laptop (Ha-Meem Textiles Zone)Dokumen3 halamanDistribution of Laptop (Ha-Meem Textiles Zone)Begum Nazmun Nahar Juthi MozumderBelum ada peringkat
- Tyron Butson (Order #37627400)Dokumen74 halamanTyron Butson (Order #37627400)tyron100% (2)
- ATOMIC GAMING Technical Tutorial 1 - Drawing Game Statistics From Diversity Multigame StatisticsDokumen4 halamanATOMIC GAMING Technical Tutorial 1 - Drawing Game Statistics From Diversity Multigame StatisticsmiltoncgBelum ada peringkat
- The SAGE Handbook of Digital JournalismDokumen497 halamanThe SAGE Handbook of Digital JournalismK JBelum ada peringkat
- Iitk Syllabus PDFDokumen520 halamanIitk Syllabus PDFcombatps1Belum ada peringkat
- 1.1 Introduction To Networks - Networks Affect Our LivesDokumen2 halaman1.1 Introduction To Networks - Networks Affect Our LivesCristian MoralesBelum ada peringkat
- CFEExam Prep CourseDokumen28 halamanCFEExam Prep CourseM50% (4)
- 4.5.1 Forestry LawsDokumen31 halaman4.5.1 Forestry LawsMark OrtolaBelum ada peringkat
- Chapter 1 Qus OnlyDokumen28 halamanChapter 1 Qus OnlySaksharBelum ada peringkat
- Top Brand Story Bar Supervisor Jobs Chennai Apply Now Latest Fresher Experienced Bar Supervisor Jobs in Various Location July 18 2021Dokumen1 halamanTop Brand Story Bar Supervisor Jobs Chennai Apply Now Latest Fresher Experienced Bar Supervisor Jobs in Various Location July 18 2021Surya JamesBelum ada peringkat
- PS300-TM-330 Owners Manual PDFDokumen55 halamanPS300-TM-330 Owners Manual PDFLester LouisBelum ada peringkat
- KSRTC BokingDokumen2 halamanKSRTC BokingyogeshBelum ada peringkat
- Proposed Delivery For PAU/AHU Method Statement SEC/MS/3-25Dokumen4 halamanProposed Delivery For PAU/AHU Method Statement SEC/MS/3-25Zin Ko NaingBelum ada peringkat
- Analytical DataDokumen176 halamanAnalytical DataAsep KusnaliBelum ada peringkat
- Yi-Lai Berhad - COMPANY PROFILE - ProjectDokumen4 halamanYi-Lai Berhad - COMPANY PROFILE - ProjectTerry ChongBelum ada peringkat
- Magnetism 02Dokumen10 halamanMagnetism 02Niharika DeBelum ada peringkat
- Bob Wright's Declaration of BeingDokumen1 halamanBob Wright's Declaration of BeingBZ Riger100% (2)
- Competency-Based Learning GuideDokumen10 halamanCompetency-Based Learning GuideOliver BC Sanchez100% (2)
- Bob Duffy's 27 Years in Database Sector and Expertise in SQL Server, SSAS, and Data Platform ConsultingDokumen26 halamanBob Duffy's 27 Years in Database Sector and Expertise in SQL Server, SSAS, and Data Platform ConsultingbrusselarBelum ada peringkat
- A320 Normal ProceduresDokumen40 halamanA320 Normal ProceduresRajesh KumarBelum ada peringkat
- Difference Between OS1 and OS2 Single Mode Fiber Cable - Fiber Optic Cabling SolutionsDokumen2 halamanDifference Between OS1 and OS2 Single Mode Fiber Cable - Fiber Optic Cabling SolutionsDharma Teja TanetiBelum ada peringkat
- 2022 Product Catalog WebDokumen100 halaman2022 Product Catalog WebEdinson Reyes ValderramaBelum ada peringkat
- MCDO of Diesel Shed, AndalDokumen12 halamanMCDO of Diesel Shed, AndalUpendra ChoudharyBelum ada peringkat