Anda mungkin juga menyukai
- Trabajo Grupal Grupo 6Dokumen42 halamanTrabajo Grupal Grupo 6Tilo CastilloBelum ada peringkat
- Arbieto Jackson Trabajo Suficiencia 2017Dokumen73 halamanArbieto Jackson Trabajo Suficiencia 2017martinBelum ada peringkat
- Ejercicios de Intervalos de ConfianzaDokumen2 halamanEjercicios de Intervalos de ConfianzaRafael ArenasBelum ada peringkat
- TAREA 5 Higiene Seguridad IndustrialDokumen19 halamanTAREA 5 Higiene Seguridad IndustrialCarlos Javier Sandoval Figueroa100% (1)
- FORO1Dokumen4 halamanFORO1caliBelum ada peringkat
- Guia Ejercicios I ParcialDokumen4 halamanGuia Ejercicios I Parcialjennifer gabrielaBelum ada peringkat
- Herramientas de Mejoramiento Continuo Básicas-2017Dokumen74 halamanHerramientas de Mejoramiento Continuo Básicas-2017David Mendoza AissaBelum ada peringkat
- Cuestionario-Estación de TrabajoDokumen3 halamanCuestionario-Estación de TrabajoAlejandra Valdés0% (1)
- Unidades de Mantenimiento NeumáticoDokumen3 halamanUnidades de Mantenimiento NeumáticoArturo PereaBelum ada peringkat
- Tarea de Flexsim Del Segundo Parcial. 1P - 2022Dokumen5 halamanTarea de Flexsim Del Segundo Parcial. 1P - 2022Marco Sanabria Jr.Belum ada peringkat
- TAREADokumen6 halamanTAREANeiry AceitunoBelum ada peringkat
- Tarea de Actuadores (Douglas Carranza)Dokumen5 halamanTarea de Actuadores (Douglas Carranza)Douglas CarranzaBelum ada peringkat
- Unidad de MantenimientoDokumen4 halamanUnidad de MantenimientoDiego John Gavilanes UvidiaBelum ada peringkat
- Tarea 3 de Gestion de Calidad 2Dokumen5 halamanTarea 3 de Gestion de Calidad 2Criadero JD la HienaBelum ada peringkat
- Distribucion D EplantaDokumen4 halamanDistribucion D EplantaAdriana zelayaBelum ada peringkat
- Amy Galeano Tarea 2 2do Parcial Diagramas Sobre ActuadoresDokumen9 halamanAmy Galeano Tarea 2 2do Parcial Diagramas Sobre ActuadoresPamela GaleanoBelum ada peringkat
- Juan Castro Modulo 9Dokumen9 halamanJuan Castro Modulo 9JD CastroBelum ada peringkat
- Foro 3Dokumen4 halamanForo 3juany riveraBelum ada peringkat
- Tarea Tercer ParcialDokumen7 halamanTarea Tercer ParcialLuis Aguilar100% (1)
- Tarea Analisis de FlujoDokumen6 halamanTarea Analisis de FlujoNeiry AceitunoBelum ada peringkat
- Tareas de Manejo de Materiales - Manuel Flores CalculosDokumen15 halamanTareas de Manejo de Materiales - Manuel Flores CalculosManuel FloresBelum ada peringkat
- Grupo#3 MDPDokumen9 halamanGrupo#3 MDPjuany riveraBelum ada peringkat
- Taller Recorrido Por Hilos TrailerDokumen3 halamanTaller Recorrido Por Hilos TrailerCHANTAL325100% (1)
- Curvas de AprendizajeDokumen9 halamanCurvas de AprendizajeMaryBelum ada peringkat
- Sencico Evaluación de Cocinas MejoradasDokumen12 halamanSencico Evaluación de Cocinas Mejoradasaugusto coelloBelum ada peringkat
- Modulo 3 Admon de La ProduccionDokumen37 halamanModulo 3 Admon de La ProduccionBettyBelum ada peringkat
- Tarea 2 Grupal PDFDokumen31 halamanTarea 2 Grupal PDFluisBelum ada peringkat
- Control de Calidad Tarea IndividualDokumen10 halamanControl de Calidad Tarea IndividualKevin ZelayaBelum ada peringkat
- Principales Mecanismos PlanosDokumen3 halamanPrincipales Mecanismos Planoschelo1018100% (1)
- Tarea 1 Parcial CCDokumen15 halamanTarea 1 Parcial CCJASON JAHDIEIBelum ada peringkat
- Calidad2 Foro 3 y 4Dokumen5 halamanCalidad2 Foro 3 y 4vanessaBelum ada peringkat
- Fundamento TeóricoDokumen12 halamanFundamento TeóricoDiego Mamani GuerreroBelum ada peringkat
- X Foro 7 WRAP Wordlwide Responsable Accredited ProductionDokumen5 halamanX Foro 7 WRAP Wordlwide Responsable Accredited ProductionKeyner GarciaBelum ada peringkat
- Diseño de Resortes 1Dokumen17 halamanDiseño de Resortes 1CarlosBelum ada peringkat
- Informe Proyecto Flexsim III Parcial Grupo#2Dokumen12 halamanInforme Proyecto Flexsim III Parcial Grupo#2Castro LorenaBelum ada peringkat
- Cuestionario Correas en VDokumen9 halamanCuestionario Correas en VJusy Mara Naranjo ArtunduagaBelum ada peringkat
- Portada Trabajo de Graduacion Campus Choluteca PregradoDokumen30 halamanPortada Trabajo de Graduacion Campus Choluteca PregradoAlex RodriguezBelum ada peringkat
- Torque y Potencia.Dokumen29 halamanTorque y Potencia.Herney Narvaez VargasBelum ada peringkat
- Tableros Metodo Simplex en BlancoDokumen6 halamanTableros Metodo Simplex en BlancoJHON SEBASTIAN BERMUDEZ DUARTEBelum ada peringkat
- Album Momento InerciaDokumen1 halamanAlbum Momento Inerciajanania clariza viana sevillaBelum ada peringkat
- Monografia JavierDokumen121 halamanMonografia JavierNormaBelum ada peringkat
- Foro ContaDokumen3 halamanForo Contaneylin0% (1)
- Manual de Costos Comparativos de Maquinaria Agrícola - CADokumen72 halamanManual de Costos Comparativos de Maquinaria Agrícola - CAJairo MateoBelum ada peringkat
- 6M CalidadDokumen4 halaman6M CalidadJackBelum ada peringkat
- Tarea 1 Seis SigmaDokumen2 halamanTarea 1 Seis Sigmalucho broonfieldBelum ada peringkat
- Tarea 1. Trabajo Medicion Del Desempeno de Una Organizacion Lluvias de IdeasDokumen15 halamanTarea 1. Trabajo Medicion Del Desempeno de Una Organizacion Lluvias de IdeasLuisBelum ada peringkat
- Mile High Cycles: M A Y O 1 7, 2 0 0 4Dokumen8 halamanMile High Cycles: M A Y O 1 7, 2 0 0 4PARRABelum ada peringkat
- Sensor OcvDokumen8 halamanSensor OcvcrispingvBelum ada peringkat
- Foros I Parcial CC2Dokumen3 halamanForos I Parcial CC2Liz SilvaBelum ada peringkat
- Aporte Calidad Total (MISION)Dokumen2 halamanAporte Calidad Total (MISION)fernanda mejiaBelum ada peringkat
- Ensamblaje Análisis Estático 1Dokumen8 halamanEnsamblaje Análisis Estático 1RonalRodrigoBelum ada peringkat
- S - 1850 Alzadora 1850Dokumen2 halamanS - 1850 Alzadora 1850Angel CastBelum ada peringkat
- Construcion Maquina EstampadoraDokumen84 halamanConstrucion Maquina Estampadoraronald odin vilasBelum ada peringkat
- Guía 7Dokumen4 halamanGuía 7JuanAndsBelum ada peringkat
- Foro 5 ContabilidadDokumen1 halamanForo 5 ContabilidadKerry0% (1)
- TALLER RECORRIDO POR HILOS TrailerDokumen3 halamanTALLER RECORRIDO POR HILOS TrailerIka VarGasBelum ada peringkat
- 01.turbina de GasDokumen61 halaman01.turbina de GasAndrea MillánBelum ada peringkat
- Tema 1 Trabajo de InvestigacionDokumen30 halamanTema 1 Trabajo de InvestigacionHanny MejiaBelum ada peringkat
- Informe Actuadores LinealesDokumen16 halamanInforme Actuadores LinealesDanny QuinatoaBelum ada peringkat
- Lab 2 BombaDokumen32 halamanLab 2 BombaCristian Rey SanchezBelum ada peringkat
- Comprendiendo Las Diferencias Entre Los Grupos de Aceites BaseDokumen3 halamanComprendiendo Las Diferencias Entre Los Grupos de Aceites BaseKatherine DarielaBelum ada peringkat
- Cal - Oxido de CalcioDokumen14 halamanCal - Oxido de CalcioVictor AlvarezBelum ada peringkat
- Control de TemperaturaDokumen37 halamanControl de TemperaturaIsra Vilema EndaraBelum ada peringkat
- 75 Seguridad en Trabajos de SoldaduraDokumen48 halaman75 Seguridad en Trabajos de SoldaduraoscarariagnaBelum ada peringkat
- Actividades Previas A La Ejecución de Una ObraDokumen19 halamanActividades Previas A La Ejecución de Una ObraritsBelum ada peringkat
- Ejercicios FracturaaaDokumen8 halamanEjercicios FracturaaaNicol Ordoñez RosalesBelum ada peringkat
- Catálogo de Acabados - Arq QuintanaDokumen12 halamanCatálogo de Acabados - Arq QuintanaYakeline Nuñez QuintanaBelum ada peringkat
- Tecnicas para Interpretacion de Analisis DGA Javier AcevedoDokumen68 halamanTecnicas para Interpretacion de Analisis DGA Javier AcevedoAlex Barzola VelardeBelum ada peringkat
- Elementos de La Administración de OperacionesDokumen25 halamanElementos de La Administración de Operacionescarlos enrique martinez beldañezBelum ada peringkat
- Ejercicios Tema 1 La Corrosion en La CarroceriaDokumen3 halamanEjercicios Tema 1 La Corrosion en La CarroceriaRaven Hamato ShenBelum ada peringkat
- GA-PL-02 Plan de Gestión Integral de Residuos V5Dokumen19 halamanGA-PL-02 Plan de Gestión Integral de Residuos V5Arturo LBelum ada peringkat
- El Carbon ActivadoDokumen22 halamanEl Carbon ActivadoJenifer Espinoza CustodioBelum ada peringkat
- Diseño de Estructura de ConocimientoDokumen13 halamanDiseño de Estructura de ConocimientoLUZ SANCHEZBelum ada peringkat
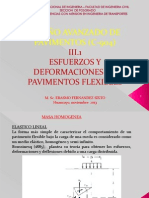
- III.1 Esfuerzos y Deformaciones en Pavimentos FlexiblesDokumen36 halamanIII.1 Esfuerzos y Deformaciones en Pavimentos FlexiblesHector Salcedo100% (2)
- Split Set - Mecánica de RocasDokumen14 halamanSplit Set - Mecánica de RocasKevin HansBelum ada peringkat
- Portafolio de MaterialesDokumen93 halamanPortafolio de MaterialesTania QuinteroBelum ada peringkat
- El Flow Shop - Foro 3Dokumen1 halamanEl Flow Shop - Foro 3JulioCzArBelum ada peringkat
- Anexo I - Analisis Caracterizacion Residuos Solidos San AgustinDokumen14 halamanAnexo I - Analisis Caracterizacion Residuos Solidos San AgustinHAMINTON ALBERTO UNI ORTEGABelum ada peringkat
- OMG 720 NF 5986 (01-51) .It - EsDokumen51 halamanOMG 720 NF 5986 (01-51) .It - EsHenry CarelaBelum ada peringkat
- Curso - Corto - PLANTA CONCENTRADORADokumen65 halamanCurso - Corto - PLANTA CONCENTRADORACARLOS GUSTAVO YATACO VILCABelum ada peringkat
- Formaleta MetálicaDokumen20 halamanFormaleta MetálicaEdiñho Ed100% (1)
- Control y Contabilizacion de Los Elementos Del CostoDokumen49 halamanControl y Contabilizacion de Los Elementos Del Costofernando gonzalezBelum ada peringkat
- Soldadura Codigo AsmeDokumen66 halamanSoldadura Codigo AsmeKristian Marchena100% (9)
- Termotanque Electrico 53 Carga Inferior PDFDokumen2 halamanTermotanque Electrico 53 Carga Inferior PDFmalena crespoBelum ada peringkat
- Manual de Reparación y Repintado de Carrocerías AutomotricesDokumen96 halamanManual de Reparación y Repintado de Carrocerías AutomotricesRodrigo Aguirre100% (3)
- PDFDokumen148 halamanPDFANDRES LOPEZBelum ada peringkat
- MonografiaDokumen31 halamanMonografiacpomaninaBelum ada peringkat
- Cat+ílogo Dixon 2018 PDFDokumen897 halamanCat+ílogo Dixon 2018 PDFsanachBelum ada peringkat
- Diferenci de Bomba de Emerson y ParrDokumen3 halamanDiferenci de Bomba de Emerson y ParrGervert QuispeBelum ada peringkat