02
Diunggah oleh
Ra HimHak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
02
Diunggah oleh
Ra HimHak Cipta:
Format Tersedia
Premire partie : chapitre 1.
Chapitre 1
RSEAUX DE NEURONES POUR LA MODLISATION
ET LA COMMANDE DE PROCESSUS
INTRODUCTION.
Lobjet de ce mmoire est lutilisation de rseaux de neurones pour la modlisation et la commande
de processus. Les tches auxquelles ces rseaux sont destins sont donc essentiellement celles de
prdicteurs ou de modles de simulation des processus commander, ainsi que celles de rgulateurs
ou de correcteurs. Nous nous plaons dans le cadre de modles temps discret des processus, cadre
qui se prte bien la commande numrique dune part, et lutilisation de rseaux de neurones
formels dautre part. Nous supposons que le comportement dynamique des processus auxquels nous
nous intressons peut tre dcrit par la classe de modles dynamiques suivante :
xp(k+1) = f x p(k), u(k)
(1)
yp(k) = g x p (k)
o kZ reprsente linstant discret t=kT, T tant le pas dchantillonnage, u(k)R nu est le vecteur
des entres externes du modle, yp(k)R ny est le vecteur de ses sorties, et xp(k)R nx est le vecteur
de ses variables dtat, linstant k ; f et g sont des fonctions non linaires.
Ces processus sont commands laide de processeurs numriques, pour lesquels nous cherchons
synthtiser des lois de commande de la forme trs gnrale :
(2)
u(k) = h yp(k), yp(k-1), , xp(k), xp(k-1), , u(k-1), u(k-2),
o h est une fonction non linaire.
Un rseau de neurones est un systme doprateurs non linaires interconnects, recevant des
signaux de lextrieur par ses entres, et dlivrant des signaux de sortie, qui sont les activits de
certains neurones. Pour les applications considres dans ce mmoire (modlisation et commande
temps discret de processus), ces signaux dentre et de sortie dun rseau de neurones sont constitus
de suites numriques. Un rseau de neurones est donc considr comme un filtre non linaire temps
discret. Nous distinguons deux types de rseaux (voir tableau 1) :
- les rseaux statiques ou non boucls : ils ralisent des fonctions algbriques. Dans ce mmoire,
nous les utilisons comme filtres transverses, prdicteurs non rcursifs, ou correcteurs par retour
dtat statique.
- les rseaux dynamiques ou boucls : ce sont des systmes dynamiques qui sont dcrits par un jeu
dquations aux diffrences non linaires couples. Ces rseaux sont utiliss dans ce travail comme
filtres rcursifs, simulateurs ou prdicteurs rcursifs, ou encore comme correcteurs par retour dtat
dynamique.
Premire partie : chapitre 1.
Dans le cas gnral, un rseau de neurones est un modle dynamique paramtr dcrit par :
S(k+1) = RN S(k), I(k); C
(3)
Y(k) = RN S(k), I(k); C
o kZ est linstant discret, I(k)R NI est le vecteur des entres externes du modle, Y(k)R NY est
le vecteur de ses sorties, et S(k)R NS est le vecteur de ses variables dtat, linstant k.
RN (., .; C), R NS+NI R NS, et RN (., .; C), R NS+NI R NY, reprsentent les fonctions ralises par
les neurones du rseau, interconnects avec les coefficients C.
Le cas particulier dun rseau non boucl correspond NS=0, simplement rgi par :
(3)
Y(k) = RN I(k); C
o RN (.; C), R NIR NY, reprsente la fonction ralise par les neurones du rseau, interconnects
avec les coefficients C.
Rseaux non boucls
Filtres transverses
Prdicteurs non rcursifs
Correcteurs par retour dtat statique
Rseaux boucls
Filtres rcursifs
Prdicteurs rcursifs
Modles de simulation
Correcteurs par retour dtat dynamique
Tableau 1.
Tches ralises par des rseaux de neurones boucls ou non1 pour la modlisation et la commande de processus.
La famille de modles paramtrs dfinie par (3) prsente les attraits suivants :
- Il existe thoriquement toujours un rseau de neurones tel que les valeurs des fonctions RN et RN
approchent avec une prcision fixe celles de fonctions continues dans un domaine donn de leurs
arguments. Presque tout modle de type (1) ou correcteur de type (2) peut donc tre approch par un
rseau de la famille (3), comme nous le verrons au II de ce chapitre.
- Il est possible destimer les coefficients dun rseau laide de squences de couples {entressorties dsires}, disponibles ou dtermins par le concepteur partir de la tche effectuer, de
manire satisfaire un indice de performance mesurant la ressemblance entre les sorties effectives du
rseau et les sorties dsires. Lun des intrts des rseaux de neurones rside dans le fait que cette
estimation des coefficients est le rsultat dune procdure algorithmique, lapprentissage, dont la
mise en uvre obit des rgles indpendantes de larchitecture et de la complexit du rseau.
Dans le paragraphe qui suit, nous prsentons les rseaux de neurones boucls et non boucls. Puis
nous rappelons les rsultats concernant lapproximation de fonctions ou de systmes dynamiques par
les rseaux de neurones. Enfin, nous introduisons la procdure algorithmique permettant destimer les
coefficients dun rseau destin une tche donne (voir galement l'annexe I).
Dans le prsent mmoire, propos de systmes mme non neuronaux, nous employons indiffremment les termes :
statique, non rcursif, non boucl, et les termes : dynamique, rcursif, boucl.
Premire partie : chapitre 1.
I. LES RSEAUX DE NEURONES.
Un rseau de neurones formels temps discret est un systme compos de deux types dlments,
ou units : les entres du rseau et les neurones eux-mmes. Chaque neurone (dterministe) est
un processeur non linaire qui, chaque instant discret k, calcule son potentiel vi(k) et son activit
zi(k) de la faon suivante :
qij
zi(k) = fi v i(k)
vi(k) =
cij, zj(k-)
jPi =0
Pi est lensemble des indices des units du rseau propageant leur activit au neurone i. Son potentiel
vi(k) est une somme des valeurs de ces units, linstant k ou des instants prcdents, pondre par
les coefficients cij,. qij est le retard maximal du neurone i sur lentre ou le neurone j. Si qij=0 pour
tout j, le neurone i est statique. La fonction f i, fonction dactivation du neurone i, est en gnral non
linaire. Ce peut tre la distribution de Heaviside, la fonction tangente hyperbolique ou une sigmode,
une fonction base radiale (RBF), ou encore la fonction identit.
z3 (k)
3
C 31,0
z1 (k) 1
C 32,1
C 34,1
z2 (k) 2
C 53,0
C 43,0
1
0
C42,0
C 51,0
C54,1
z5 (k)
0
1
0
0
1
z4 (k)
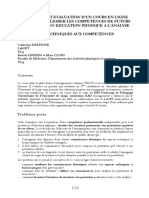
Figure 1.
Exemple de rseau de neurones et de son graphe.
Un rseau de neurones est conu pour remplir une tche que le concepteur dfinit par une squence
dentres, et par une squence de valeurs dsires correspondantes pour les activits de certains
neurones du rseau, les neurones de sortie. Les neurones qui ne sont pas des neurones de sortie sont
dits cachs. Le rseau de la figure 1 possde deux entres, deux neurones cachs, et un neurone de
sortie.
Pour caractriser un rseau de neurones, il est pratique dutiliser son graphe. Ses nuds sont les
neurones, ses racines les entres du rseau, et les arcs sont les connexions pondres par leur retard.
Sil ny a pas de cycle dans ce graphe, le rseau est non boucl, sinon, il est boucl [NER92b].
Larchitecture dun rseau est dfinie par le graphe du rseau, les coefficients de celui-ci, et par les
fonctions dactivation des neurones. Le caractre boucl ou non du rseau, ainsi que les fonctions
dactivation, peuvent tre fixs en fonction de la tche que doit remplir le rseau de neurones. Les
valeurs des coefficients sont en gnral dtermines par apprentissage, mais certaines dentre elles
peuvent tre fixes lavance. Ainsi, dans le cas de la modlisation dun processus, larchitecture peut
Premire partie : chapitre 1.
tre partiellement dtermine par des connaissances a priori ; les valeurs de coefficients ayant une
signification physique peuvent tre fixes pralablement lapprentissage.
I.1. LES RSEAUX DE NEURONES NON BOUCLS .
Un rseau est non boucl, ou statique, si son graphe ne possde pas de cycle. Dans le contexte du
traitement du signal et de lautomatique, il ralise un filtre transverse non linaire temps discret. Ce
filtre peut possder des synapses retard. On a intrt mettre le rseau sous une forme quivalente,
dite forme canonique, constitue uniquement de neurones retard nul, ou neurones statiques : cette
forme a lavantage de faire apparatre les entres effectives du rseau chaque instant, et de faciliter
lapprentissage (car toutes les connexions sont de mme type). Ses units (entres et neurones) sont
ordonnes, et les connexions ne peuvent aller que dune unit un neurone dont lindice est
suprieur. Chaque neurone i du rseau calcule linstant k :
zi(k) = fi v i(k) avec vi(k) = cij zj(k)
jPi
o vi(k) est le potentiel du neurone i linstant k, zi(k) son activit, P i est lensemble des indices des
units propageant leur activit au neurone i, et cij est le coefficient de la connexion reliant lunit j au
neurone i.
Un rseau non boucl ralise donc une transformation entre/sortie non linaire RN paramtre par
les coefficients C du rseau (voir figure 2) :
Y(k) = RN I(k); C
o Y(k)R NY est le vecteur des sorties linstant k, cest--dire des activits des neurones de sortie
du rseau linstant k, et I(k)R NI est le vecteur des entres externes linstant k. RN(.; C) :
R NIR NY, reprsente la fonction ralise par les neurones du rseau interconnects avec les
coefficients C.
Sorties l'instant k
Y(k)
Rseau de neurones
statiques
RN
I(k)
Entres externes l'instant k
Figure 2.
Forme canonique dun rseau de neurones non boucl.
Premire partie : chapitre 1.
La figure 3 illustre lutilisation de la forme canonique pour lapprentissage de filtres en cascade :
un rseau de type TDNN (Time Delay Neural Network [WAI89]) est reprsent sur la figure 3a, et sa
forme canonique sur la figure 3b. Cette forme canonique possde 7 entres externes, 5 neurones
cachs, et un neurone de sortie.
y(k)
y(k)
c32,0 c32,1 c32,2 c32,3 c32,4
1
2
3
4
0
c32,0
c21,1 c21,2
1
2
u(k)
c32,3
c21,0
c 21,1
u(k-1)
c32,4
c21,0
c21,1
c32,2
c21,0
c21,0
c 32,1
c21,0
c21,1
c21,0
c21,1
c21,1
c 21,2
c21,2
c 21,2
c21,2
c21,2
u(k-2)
u(k-3)
u(k-4)
u(k-5)
u(k-6)
u(k)
a)
b)
Figure 3.
Mise sous forme canonique dun filtre transverse non linaire temps discret (TDNN).
T
I(k) = u(k), u(k-1), u(k-2), u(k-3), u(k-4), u(k-5), u(k-6) ; Y(k) = y(k) .
Larchitecture de rseau non boucl la plus gnrale est celle du rseau compltement connect
(voir figure 4). Toutes les neurones cachs et les neurones de sortie sont connects aux units dindice
infrieur2.
Sorties du rseau
Neurones cachs
NI+1
N I+2
Neurones de sortie
NI+N c+1
...
..........
NI+N c+N Y
....
NI-1
NI
Entres externes
Figure 4.
Rseau de neurones non boucl compltement connect.
Un rseau non boucl ralise une tranformation entre/sortie ; il nest donc pas ncessaire que ses sorties soient
fonctions les unes des autres. Dans ce travail, les neurones de sortie dun rseau compltement connect ne sont ainsi pas
connects entre eux.
10
Premire partie : chapitre 1.
Les entres externes sont numrotes de 1 N I, les neurones cachs de NI+1 N I+N C, et les
neurones de sortie de NI+NC+1 NI+NC+NY.
Sorties du rseau
N I+Nc+1
NI+Nc +N Y
NI+1
....
. . . . N.+N.
I
.....
Couche de neurones de sortie
Couche de neurones cachs
NI
Entres externes
Figure 5.
Rseau de neurones non boucl une couche de neurones cachs.
Une architecture trs utilise, historiquement en raison surtout de sa pertinence en classification, est
celle du rseau couches (voir figure 5). Les neurones cachs sont rpartis en couches successives,
les neurones appartenant une couche donne ntant commands que par les neurones de la couche
prcdente, et ceux de la premire couche ntant connects quaux entres externes. Mentionnons que
la proprit dapproximation universelle des rseaux de neurones est valable pour la famille des
rseaux possdant seulement une couche de neurones cachs (voir II).
I.2. LES RSEAUX DE NEURONES BOUCLS .
Un rseau est boucl, ou dynamique, si son graphe possde au moins un cycle. Il constitue un
filtre rcursif non linaire temps discret. Comme pour les rseaux non boucls, on a intrt, pour
lapprentissage, mettre le rseau sous une forme quivalente dite canonique, constitue de neurones
statiques. En effet, tout rseau de neurones boucl temps discret dordre NS peut tre reprsent par
un rseau dont la dynamique est dcrite par NS quations aux diffrences couples dordre 1, mettant
en jeu NS variables dtat, et NI entres externes. Cette forme canonique nest en gnral pas unique.
Le comportement dynamique dun rseau de neurones boucl peut tre dcrit par la reprsentation
dtat paramtre par les coefficients C (voir figure 6) :
S(k+1) = RN S(k), I(k); C
Y(k) = RN S(k), I(k); C
o I(k)R NI est le vecteur des entres externes, S(k)R NS le vecteur des variables dtat, Y(k)R NY
le vecteur des sorties, linstant k, et S(k+1)R NS est le vecteur des variables dtat linstant k+1.
RN (., .; C) et RN (., .; C) reprsentent les fonctions ralises par le rseau de neurones statiques de
la forme canonique interconnects avec les coefficients C.
Premire partie : chapitre 1.
11
Sorties
l'instant k
Variables d'tat
l'instant k+1
Y(k)
S(k+1)
Rseau de neurones statiques
RN , RN
I(k)
Retards
unitaires
S(k)
Variables d'tat
l'instant k
Entres externes
l'instant k
Figure 6.
Forme canonique dun rseau de neurones boucl.
Une forme canonique dun rseau de neurones boucl est ainsi dfinie partir dun rseau non
boucl constitu de neurones statiques possdant NI entres externes, NS entres dtat (les variables
dtat linstant k), NC neurones cachs et NY neurones de sortie (neurones pour les activits
desquels il existe une valeur dsire). Les sorties du rseau linstant k sont les activits des NY
neurones de sortie, et les variables dtat linstant k+1 sont les activits de NS neurones que nous
appelons neurones dtat3. Ces neurones dtat sont soit des neurones cachs, soit des neurones de
sortie.
z1(k)
C 31,0
z2(k-1)
z5 (k)
C 51,0
5
C 54,1
C 42,0
C 53,0
C 34,1
C 43,0
C32,1
z3(k-1)
z3 (k)
q-1
Figure 7.
Mise sous forme canonique du rseau de la figure 1.
T
I(k) = z1(k), z2(k-1) ; S(k) = z3(k-1) ; Y(k) = z5(k) .
Par exemple, mettons le rseau de la figure 1, boucl comme l'indique son graphe, sous une forme
canonique (voir figure 7). Ce rseau possde deux entres externes (NI=2) z1(k) et z2(k-1), une entre
dtat (NS=1) z3(k-1), deux neurones cachs (NC=2), dont un neurone dtat (NS=1) dont lactivit
Dans le prsent mmoire, comme pour les rseaux non boucls, les neurones de sortie ne sont pas relis entre eux.
Les neurones d'tat ne le sont pas non plus (voir la note 2, ainsi que les exemples de rseaux des chapitres 3 et 4).
12
Premire partie : chapitre 1.
donne la nouvelle valeur de la variable dtat z3(k), et un neurone de sortie (NY=1) dont lactivit
donne la valeur de la sortie z5(k).
II. PROPRITS DAPPROXIMATION DES RSEAUX DE NEURONES.
Indpendamment de tout problme dapprentissage, la question que nous nous posons dans ce
paragraphe est la suivante : quelles fonctions, ou quels systmes dynamiques, peuvent tre raliss
par les rseaux de neurones non boucls et boucls ?
II.1. RSEAUX NON BOUCLS .
Les rsultats qui prsentent un intrt pour la modlisation et la commande de processus sont ceux
qui concernent lapproximation de fonctions valeurs continues. Nous laissons donc de ct la
possibilit de raliser des fonctions boolennes l'aide de rseaux de neurones, dmontre
anciennement par McCulloch et Pitts [MCU43], ainsi que celle de raliser une frontire de sparation,
solution dun problme de classification.
Les travaux de Cybenko [CYB89] et Funahashi [FUN89] ont prouv la possibilit dapprocher des
fonctions continues, au sens de la norme uniforme sur les compacts, par des rseaux de neurones.
Les rseaux considrs sont de type rseau une couche de neurones cachs fonction dactivation
non linaire, et neurones de sortie linaires. Dans le cas du thorme de Cybenko, lhypothse sur la
fonction dactivation est quelle a pour limite 0 en - et 1 en +, dans celui de Funahashi, quelle est
croissante, non constante et borne. Les fonctions non continues, mais mesurables, peuvent aussi tre
approches, mais dans un sens moins fort [HOR90]. Il existe par ailleurs quelques rsultats sur le
nombre de neurones requis pour approcher une fonction avec une prcision fixe, pour certaines
classes de fonctions [BAR91] [SON93].
Ces rsultats affirment donc, pour toute fonction dterministe usuelle, lexistence dune
approximation par un rseau de neurones. Les rseaux compltement connects ou couches, et
neurones cachs sigmodaux, remplissent les conditions dapplication des thormes. Dans ce travail,
nous utilisons systmatiquement ce type de rseaux, lexclusion par exemple des rseaux utilisant
des fonctions base radiale (RBF). Une raison en est que, mme si ces rseaux jouissent galement
de proprits dapproximation intressantes, et mme si leur apprentissage peut tre ralis laide de
la mthode des moindres-carrs ordinaires (MCO), leur utilisation est souvent beaucoup moins
conomique, ou parcimonieuse du point de vue du nombre de connexions, que celle des rseaux
sigmodes. En toute rigueur, les rseaux RBF peuvent tre aussi parcimonieux que les rseaux
sigmodes, mais condition dajuster la position des centres des RBF de manire non linaire
[SON93], ce qui supprime le principal intrt des RBF : la simplicit de lapprentissage par la
mthode des MCO.
Premire partie : chapitre 1.
13
II.2. RSEAUX BOUCLS .
La proprit dapproximation universelle des rseaux de neurones prend un sens diffrent sil
sagit dun rseau boucl. En effet, considrons un processus reprsent par un modle de type (3) :
xp(k+1) = f x p(k), u(k)
yp(k) = g x p (k)
o f et g sont des fonctions continues. Il existe bien un rseau boucl tel que, pour des entres
donnes xp(k) et u(k), les variables dtat S(k+1) et les sorties Y(k) calculs par le rseau approchent
avec une prcision fixe ltat xp(k+1) et la sortie yp(k) du processus. En effet, il suffit pour cela que
le rseau non boucl de sa forme canonique soit constitu de deux sous-rseaux dont lun approche la
fonction f, et lautre la fonction g, les conditions dapplications des rsultats ci-dessus tant remplies.
Mais ceci nest pas ncessaire pour que le rseau reproduise le comportement entre-sortie du
processus (voir chapitre 2 I.2.2.2), ni pertinent pour lapproximation dun systme dynamique. En
effet, une proprit dapproximation universelle pour les rseaux boucls peut snoncer de la manire
suivante : pour tout systme dynamique (3), pour toute prcision dsire , pour un intervalle de
temps fini [0;T], pour des entres u(.) : [0,T]U R nu et un tat initial x(0)X Rnx, il existe un
rseau de neurones boucl qui approche le comportement entre-sortie du systme (3) avec la
prcision sur lintervalle [0;T] et sur les ensembles U et X [SON93]. La dfinition de
lapproximation dun systme dynamique par un rseau de neurones boucl nest donc pas globale,
mais restreinte un domaine des espaces dtat et dentre, sur un intervalle de temps fini : un tel
approximateur peut donc ne pas reflter des caractristiques fondamentales du processus quil est
cens approcher, sa stabilit par exemple.
III. APPRENTISSAGE DES RSEAUX DE NEURONES.
Le problme de lapproximation dune fonction nest quun aspect de lapprentissage des rseaux
de neurones, la proprit dapproximation universelle tant seulement une condition ncessaire leur
utilisation comme modles et correcteurs non linaires gnraux.
Dans le cas o la tche du rseau de neurones est une tche de modlisation dun processus
physique, il semble raisonnable de supposer que les sorties mesures sur le processus obissent des
lois dterministes, de type (1) par exemple, et de chercher une expression mathmatique des fonctions
f et g. La proprit dapproximation universelle est donc une proprit ncessaire du modle utilis
cette fin, mais elle nest pas suffisante. En effet :
- dune part, dans la pratique, les fonctions dterminer sont dfinies par un ensemble fini de couples
{entres-sorties mesures}, qui ne permet pas de dterminer ces fonctions de faon univoque ; le
but de lapprentissage est alors de trouver la solution la plus parcimonieuse, passant par tous les
points dapprentissage, qui, si lensemble dapprentissage est bien choisi, tendra vers les fonctions f
et g supposes rgir le fonctionnement du processus.
14
Premire partie : chapitre 1.
- dautre part, comme nous le verrons au chapitre 2 consacr la modlisation, on est souvent en
prsence de processus affects de perturbations alatoires ; dans ce cas, le but de lapprentissage ne
peut tre de passer par tous les points de lensemble dapprentissage : bien que le systme
dapprentissage ne dispose pas des valeurs prises sur lensemble dapprentissage par les fonctions f
et g supposes rgir le fonctionnement du processus, il doit ajuster les coefficients du rseau de
faon que les fonctions quil ralise tendent vers ces fonctions. La mise au point dun tel systme
dapprentissage en fonction des hypothses faites sur les lois dterministes et les perturbations
alatoires affectant un processus fait lobjet des chapitres 2 et 3 de ce mmoire.
Dans le cas o la tche du rseau est de raliser une loi de commande imposant une dynamique
dsire un processus pour lequel on dispose dun modle, la dmonstration de lexistence dune telle
loi de commande est en elle-mme un problme. En effet, si la synthse du correcteur est effectue
laide dun modle neuronal, dont il est difficile de dterminer les caractristiques de faon analytique,
cette existence peut tre difficile tablir. Ces problmes spcifiques la commande sont abords au
chapitre 5.
Dans ce paragraphe, nous donnons les principes et dcrivons la mise en uvre des procdures
dapprentissage, indpendamment des considrations dexistence que nous venons dvoquer.
III.1. PRINCIPE GNRAL .
Larchitecture du rseau de neurones nest souvent que partiellement impose par la tche
raliser : les entres, ltat, et les sorties du rseau peuvent tre fixes en fonction de celle-ci par le
concepteur, ainsi que le type et la connectivit des neurones (comme nous lavons prcis au
paragraphe prcdent, nous utilisons dans ce travail des rseaux neurones cachs fonction
d'activation tangente hyperbolique, compltement connects). Mais le nombre de neurones ne peut
tre fix a priori, et il est en gnral dtermin selon une procdure itrative, suivant le succs de
lapprentissage (il existe des mthodes systmatiques de slection de modles dynamiques [URB94]).
Larchitecture du rseau tant fixe, le but de lapprentissage est lestimation des coefficients pour
remplir au mieux la tche laquelle le rseau est destin.
Tche dun rseau de neurones.
Comme mentionn plus haut, la tche du rseau est dfinie par :
- deux squences de nombres, une squence applique aux entres externes {I(k)}, et une squence
de valeurs dsires correspondantes {D(k)} pour les sorties. Ces squences constituent les
squences dapprentissage.
- une fonction de cot minimiser : en effet, la tche ne consiste pas ncessairement rendre les
sorties du rseau gales aux sorties dsires ou proches de celles-ci. Par exemple, pour un
problme de rgulation, on peut souhaiter minimiser galement le cot nergtique de la commande.
Le critre fera donc intervenir non seulement lcart de la sortie la valeur de consigne, mais
galement lnergie dpense. Ou bien, si le processus possde plusieurs sorties, on peut attacher
Premire partie : chapitre 1.
15
plus dimportance certaines dentre elles ; cela se traduit par une pondration des diffrents termes
de la fonction de cot (cest une gnralisation de la commande linaire quadratique, voir chapitre
5).
Lapprentissage d'un rseau de neurones est ainsi dfini comme un problme doptimisation qui
consiste trouver les coefficients du rseau minimisant une fonction de cot.
Exemples.
a) Apprentissage du prdicteur associ un processus mono-entre/mono-sortie :
Squence des
entres externes
u
Processus
Squence des
valeurs dsires
yp
+
u
Prdicteur
(rseau de neurones)
Algorithme
d'apprentissage
Figure 8.
Systme dapprentissage pour la modlisation dun processus.
La squence des entres externes est constitue des commandes {u(k)} appliques au processus, et
la squence des sorties dsires des sorties {yp(k)} mesures sur le processus. La figure 8 reprsente
le schma-bloc dun systme dapprentissage pour la modlisation du processus : le but est destimer
les coefficients du rseau prdicteur de faon que ses sorties soient aussi proches que possible de
celles du processus.
b) Apprentissage du correcteur dun processus par une mthode de commande indirecte.
Squence des
entres externes
r
y
Correcteur
(rseau de neurones)
Modle
de rfrence
Squence des
valeurs dsires
yr
Modle de simulation
(rseau de neurones
fix)
r
Algorithme
d'apprentissage
Figure 9.
Systme dapprentissage pour la commande dun processus.
+
y
16
Premire partie : chapitre 1.
On dispose dun modle de simulation du processus, par exemple un rseau de neurones. La
squence des entres externes est constitue des consignes {r(k)} (r(k) = cte k sil sagit de
rgulation). La squence des sorties dsires pour le systme {correcteur + modle de simulation} est
la squence des sorties {yr(k)} dun modle de rfrence dont la dynamique traduit les exigences du
cahier des charges sur le comportement en boucle ferme du systme de commande, cest--dire du
processus rel avec son organe de commande. La figure 9 suivante reprsente le schma-bloc du
systme dapprentissage.
Notons que dans le cadre de la commande indirecte, cest--dire utilisant pour lapprentissage un
modle de simulation du processus, le rseau pour lequel la tche est dfinie (entres externes,
sorties dsires, et fonction de cot minimiser) est compos du rseau dont les coefficients sont
estimer, le correcteur, et dun rseau dont les coefficients sont fixs, le modle de simulation.
III.2. EXPRESSION DE LA FONCTION DE COT.
Dans ce mmoire, nous nous intressons la mise au point de systmes, modles ou correcteurs,
non adaptatifs4 : la phase dapprentissage et la phase dutilisation des rseaux considrs sont
distinctes. Ainsi, un correcteur appris hors-ligne laide dun modle de simulation du processus
commander ne subira plus de modifications de ses coefficients pendant son utilisation avec le
processus. Dans ce cadre non adaptatif, les squences dapprentissage sont de taille finie, disponibles
dans une base de donnes. La fonction de cot minimiser porte donc sur un nombre fini dinstants :
elle est en gnral fonction croissante des carts entre les sorties du rseau et les sorties dsires
correspondantes.
Pour cette prsentation, nous nous plaons dans le cas o la fonction de cot est une fonction
quadratique des erreurs {E(k)}, carts entre les sorties du rseau {Y(k)} et les sorties dsires
{D(k)} ; cette erreur est dfinie sur une fentre temporelle dont la taille est gale la taille N des
squences dapprentissage. La minimisation de cette fonction de cot est effectue itrativement en
modifiant les coefficients chaque prsentation de la squence : les erreurs {E(k)} sont calcules
laide du rseau muni des coefficients disponibles la fin de litration prcdente, et des squences
dapprentissage. Un tel algorithme dapprentissage est itratif, et non rcursif.
On peut ventuellement raliser la minimisation en utilisant un algorithme rcursif. Dans ce cas,
chaque instant k de la fentre totale de taille N, on considre une fonction auxiliaire, dite fonction
dapprentissage, dfinie sur une fentre glissante de taille Nc << N correspondant aux instants passs
(de k-Nc+1 k), et lon modifie les coefficients chaque instant k afin de diminuer, en moyenne, la
fonction de cot. Si plusieurs itrations sont effectues chaque instant k, lalgorithme est rcursif et
itratif. Lorsque la squence dapprentissage a t parcourue, on replace la fentre glissante son
dbut. Lutilisation dun algorithme rcursif permet aussi de minimiser la fonction de cot, mais ne
peut garantir la convergence des coefficients quen moyenne. Ces algorithmes ne prsentent de
Pour une prsentation de lapprentissage de systmes adaptatifs entre-sortie, voir [NER92a].
Premire partie : chapitre 1.
17
vritable intrt que pour les systmes adaptatifs, en particulier en traitement du signal. Ce chapitre
(ainsi que les suivants) ayant pour objet l'apprentissage de systmes non adapatifs, nous prsentons
uniquement des algorithmes non rcursifs et itratifs.
Lexpression de la fonction de cot litration i sur une fentre fixe englobant toute la longueur N
de la squence dapprentissage est la suivante :
J(C, i) = 1
N
k= 1
E i(k)TW
E i(k) = 1
N
D(k) - Y i(k) W D(k) - Y i(k)
k= 1
o C reprsente les coefficients du rseau C(i-1) disponibles litration i, Ei(k) le vecteur des erreurs
linstant k et litration i, W une matrice dfinie positive (qui sera le plus souvent choisie
diagonale), D(k) le vecteur des sorties dsires linstant k, et Yi(k) le vecteur des sorties du rseau
linstant k et litration i.
III.3. MINIMISATION DE LA FONCTION DE COT.
Puisque nous utilisons des rseaux de neurones, les sorties du systme subissant un apprentissage
sont en gnral des fonctions non linaires des coefficients estimer. La recherche du minimum de la
fonction de cot ne peut seffectuer laide des moindres carrs ordinaires, et demande donc
lutilisation de mthodes de programmation non linaire. Nous prsentons dans lannexe I un
algorithme gnral de calcul du gradient de la fonction de cot dans le cas de lutilisation de rseaux de
neurones, gradient qui est utilis soit comme direction de descente, soit pour calculer une direction de
descente permettant une convergence plus rapide (mthode quasi-newtonienne par exemple).
Lalgorithme est prsent pour tout rseau de neurones boucl de la forme gnrale du I.2, dont le
rseau non boucl est un cas particulier. La prsentation est largie aux rseaux dont ltat nest pas
constitu exclusivement des valeurs retardes des sorties (dits rseaux dtat , voir les notations
du chapitre 2 I.1).
Nous avons signal que, dans le cas de lutilisation de mthodes de commande indirecte,
lapprentissage dun correcteur diffrait de celui dun modle prdictif : le systme considrer pour
lapprentissage est constitu non du seul rseau, mais du systme global constitu du correcteur et du
modle de simulation, puisque les valeurs dsires concernent la sortie du modle. Lalgorithme de
calcul du gradient que nous proposons en annexe reste bien sr applicable dans ce cas. En effet, nous
verrons quil repose sur le calcul des drives de la fonction de cot par rapport aux sorties de tous les
neurones. Or, le calcul des drives par rapport aux sorties des neurones du rseau modle fournit le
Jacobien de celui-ci, ncessaire lvaluation du gradient par rapport aux coefficients du correcteur.
Les drives par rapport aux sorties des neurones du rseau correcteur sont ensuite utilises pour
calculer le gradient par rapport ses coefficients, et pour effectuer les modifications de ces
coefficients. Le principe de lapprentissage dun correcteur avec un modle neuronal du processus est
gnralisable tout modle, neuronal ou non, soit en mettant le modle sous forme de rseau avec les
coefficients et les fonctions dactivations appropries, soit en calculant directement le Jacobien du
18
Premire partie : chapitre 1.
modle. Les modalits de lapprentissage dun correcteur sont amplement dveloppes dans le
chapitre 5 consacr la commande.
CONCLUSION.
Dans ce chapitre introductif, complt par lannexe I pour les aspects pratiques de loptimisation,
nous avons prsent les modles dynamiques universels que sont les rseaux de neurones, et le cadre
gnral de leur apprentissage, largi aux rseaux (dits rseaux dtat , cf chapitre 2 I.1) dont
ltat nest pas constitu exclusivement des valeurs retardes des sorties.
Lutilisation des rseaux de neurones pour la modlisation de processus est dveloppe dans les
chapitres 2 4, et elle est applique un problme industriel dans la deuxime partie de ce mmoire,
avec la modlisation du vhicule autonome REMI (chapitre 7). La commande neuronale de processus
est prsente dans les chapitres 5 et 6, et, dans la deuxime partie, les systmes de commande
prconiss sont appliqus au pilotage de REMI (chapitre 8).
Anda mungkin juga menyukai
- Eda Baci Ped 3757Dokumen4 halamanEda Baci Ped 3757api-371465708Belum ada peringkat
- PDF Translator 1690979409622Dokumen72 halamanPDF Translator 1690979409622Stephane KABOREBelum ada peringkat
- 3.1 Charge Décharge C ExaoDokumen3 halaman3.1 Charge Décharge C ExaoYa HiaBelum ada peringkat
- Anthropologie Chez ST Augustin Et L'anthrolopogie MédiévaleDokumen4 halamanAnthropologie Chez ST Augustin Et L'anthrolopogie MédiévaleBenjamin MilordBelum ada peringkat
- Se Conhecesses o Dom de DeusDokumen1 halamanSe Conhecesses o Dom de Deusaggathaestrela100% (3)
- Poly Si MeriseDokumen112 halamanPoly Si MeriseZaid ZizouBelum ada peringkat
- Troupeau-Le Traité Sur La TrinitéDokumen20 halamanTroupeau-Le Traité Sur La TrinitéHammadi HabadBelum ada peringkat
- Phi-1110 A19 87853Dokumen11 halamanPhi-1110 A19 87853marlenezogo8Belum ada peringkat
- Tendances Principales D e La Recherche Dans Les Sciences Sociales Et HumainesDokumen1.034 halamanTendances Principales D e La Recherche Dans Les Sciences Sociales Et HumainesfenomenotextesBelum ada peringkat
- Trouver Le Plaisir D Enseigner Et D ApprendreDokumen6 halamanTrouver Le Plaisir D Enseigner Et D ApprendreStukineBelum ada peringkat
- Antécédent (Grammaire)Dokumen2 halamanAntécédent (Grammaire)Evariste GbedoyesiaBelum ada peringkat
- ABÉLÈS, Marc e JEUDY, Henri P - Anthropologie Du PolitiqueDokumen35 halamanABÉLÈS, Marc e JEUDY, Henri P - Anthropologie Du Politiquesergio tavaresBelum ada peringkat
- Chapitre4 AlgebreS1Dokumen21 halamanChapitre4 AlgebreS1Salah MoulakatBelum ada peringkat
- Guide Confiance en SoiDokumen13 halamanGuide Confiance en SoiLuisBelum ada peringkat
- Ma PhilosophieDokumen4 halamanMa PhilosophieAmina OusaidBelum ada peringkat
- Encyclopédie de La Gestion Et Du ManagementDokumen315 halamanEncyclopédie de La Gestion Et Du ManagementSafa Fessi50% (2)
- Marx Et Le Marxisme Une Pensee Une Histoire PDFDokumen161 halamanMarx Et Le Marxisme Une Pensee Une Histoire PDFhugueseap100% (1)
- Cours Terminologie Scientifique Et Expression Écrite Et OraleDokumen8 halamanCours Terminologie Scientifique Et Expression Écrite Et OraleSAHRA YOUBelum ada peringkat
- Valeur Test Critere de Caracterisation StatistiqueDokumen7 halamanValeur Test Critere de Caracterisation StatistiqueJuan SimpertigueBelum ada peringkat
- Hypnose Ericksonienne Communication Engageante Persuasive Infuence Psychologie Sociale Persuasion Jean Touati Orgadia PDFDokumen11 halamanHypnose Ericksonienne Communication Engageante Persuasive Infuence Psychologie Sociale Persuasion Jean Touati Orgadia PDFNas FartasBelum ada peringkat
- Identité Meurtrières-3Dokumen2 halamanIdentité Meurtrières-3Alexa VázquezBelum ada peringkat