Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Grade 7 Math Lesson 22: Addition and Subtraction of Polynomials Learning GuideDokumen4 halamanGrade 7 Math Lesson 22: Addition and Subtraction of Polynomials Learning GuideKez MaxBelum ada peringkat
- Stamp 07 eDokumen6 halamanStamp 07 eDumitru TuiBelum ada peringkat
- Ip TunnelingDokumen15 halamanIp TunnelingBon Tran HongBelum ada peringkat
- 2012 Karshaniya YavaguDokumen4 halaman2012 Karshaniya YavaguRANJEET SAWANTBelum ada peringkat
- Unit 12 BriefDokumen7 halamanUnit 12 Briefapi-477397447Belum ada peringkat
- The English We SpeakDokumen2 halamanThe English We Speakcaeronmustai100% (1)
- High School Physics Rutherford Atom Lesson 27Dokumen4 halamanHigh School Physics Rutherford Atom Lesson 27John JohnsonBelum ada peringkat
- Manual CAT 345C LDokumen20 halamanManual CAT 345C LRicardo SotoBelum ada peringkat
- GTAG-14 Edited With Ad 05-20-20101 PDFDokumen32 halamanGTAG-14 Edited With Ad 05-20-20101 PDFpiornelBelum ada peringkat
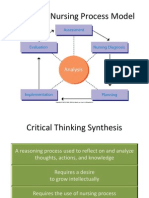
- NUR 104 Nursing Process MY NOTESDokumen77 halamanNUR 104 Nursing Process MY NOTESmeanne073100% (1)
- Algorithm Design: Figure 1. Architecture Diagram For Greykite Library's Main Forecasting Algorithm, SilverkiteDokumen3 halamanAlgorithm Design: Figure 1. Architecture Diagram For Greykite Library's Main Forecasting Algorithm, Silverkitesiper34606Belum ada peringkat
- Roles of Community Health NursingDokumen2 halamanRoles of Community Health Nursingdy kimBelum ada peringkat
- Tom Rockmore - Hegel's Circular EpistemologyDokumen213 halamanTom Rockmore - Hegel's Circular Epistemologyluiz100% (1)
- Review of Ventura's "An Overview of Child Psychology in The Philippines"Dokumen2 halamanReview of Ventura's "An Overview of Child Psychology in The Philippines"Irene CayeBelum ada peringkat
- Ninja 5e v1 5Dokumen8 halamanNinja 5e v1 5Jeferson Moreira100% (2)
- Adolescents and Career DevelopmentDokumen10 halamanAdolescents and Career DevelopmentMasrijah MasirBelum ada peringkat
- 1939 - Hammer - Terrain Corrections For Gravimeter StationsDokumen11 halaman1939 - Hammer - Terrain Corrections For Gravimeter Stationslinapgeo09100% (1)
- Pamphlet On Arrangement of Springs in Various Casnub Trolleys Fitted On Air Brake Wagon PDFDokumen9 halamanPamphlet On Arrangement of Springs in Various Casnub Trolleys Fitted On Air Brake Wagon PDFNiKhil GuPtaBelum ada peringkat
- The Four Types of Gaps and How To Play Them PDFDokumen17 halamanThe Four Types of Gaps and How To Play Them PDFshaikiftakar100% (2)
- Peter Brandt InterviewDokumen38 halamanPeter Brandt InterviewNishant P Kalaskar100% (1)
- Resume LittletonDokumen1 halamanResume Littletonapi-309466005Belum ada peringkat
- 2 MercaptoEthanolDokumen8 halaman2 MercaptoEthanolMuhamad ZakyBelum ada peringkat
- Complete DaikinDokumen11 halamanComplete DaikinAGNIDEEP BAIDYABelum ada peringkat
- PS410Dokumen2 halamanPS410Kelly AnggoroBelum ada peringkat
- Charging Station For E-Vehicle Using Solar With IOTDokumen6 halamanCharging Station For E-Vehicle Using Solar With IOTjakeBelum ada peringkat
- Text Descriptive Tentang HewanDokumen15 halamanText Descriptive Tentang HewanHAPPY ARIFIANTOBelum ada peringkat
- Cross CultureDokumen134 halamanCross CulturePhương AnnhBelum ada peringkat
- Bhagavatam English Chapter 10bDokumen22 halamanBhagavatam English Chapter 10bsrimatsimhasaneshwarBelum ada peringkat
- State of The Art in Research On MicrogridsDokumen36 halamanState of The Art in Research On MicrogridsDulal MannaBelum ada peringkat
- WTSDA2021 TSDBlack Belt ManualDokumen160 halamanWTSDA2021 TSDBlack Belt ManualJesus HernandezBelum ada peringkat