Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Pinsex Response BriefDokumen22 halamanPinsex Response BriefMarcJohnRandazzaBelum ada peringkat
- GrafcetDokumen6 halamanGrafcetcesar_mosqueda836Belum ada peringkat
- Andromax Product Defect RatesDokumen12 halamanAndromax Product Defect Ratesanat17Belum ada peringkat
- Facilities and Floor PlanDokumen7 halamanFacilities and Floor Planapi-312955079Belum ada peringkat
- Dual Priority Switch MonitorDokumen2 halamanDual Priority Switch MonitorAshiq Salman100% (1)
- Program Objectives and Its Relationship To College GoalsDokumen8 halamanProgram Objectives and Its Relationship To College GoalsRaymond RamirezBelum ada peringkat
- 10gen-MongoDB Operations Best PracticesDokumen26 halaman10gen-MongoDB Operations Best PracticesRohit WaliBelum ada peringkat
- HP Superdome 2 Partitioning Administrator Guide (5900-2540, December 2012) PDFDokumen126 halamanHP Superdome 2 Partitioning Administrator Guide (5900-2540, December 2012) PDFSladur BgBelum ada peringkat
- Cad StandardsDokumen21 halamanCad Standardsarch_ankitBelum ada peringkat
- CBConfig Automation InterfaceDokumen18 halamanCBConfig Automation InterfaceFerchaleBelum ada peringkat
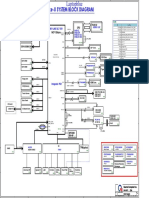
- ZAAA x32 Ironman SK (ZAA) & Captain SK (ZAAA) MB 6L E Version PDFDokumen48 halamanZAAA x32 Ironman SK (ZAA) & Captain SK (ZAAA) MB 6L E Version PDFSebastian StanacheBelum ada peringkat
- Do-It-Yourself (DIY) Dog Training by Sharda BakerDokumen142 halamanDo-It-Yourself (DIY) Dog Training by Sharda Bakerbertspamintuan100% (3)
- ERPSCM MM SRVServiceEntrySheet 180915 0417 1152Dokumen7 halamanERPSCM MM SRVServiceEntrySheet 180915 0417 1152ronnzaaBelum ada peringkat
- Green Computing AbstractDokumen1 halamanGreen Computing AbstractSaranya Velusamy100% (1)
- Ez 2 ZDB 77Dokumen348 halamanEz 2 ZDB 77hipkumaBelum ada peringkat
- Ancient God Deadlift RoutineDokumen2 halamanAncient God Deadlift Routinebasuthker raviBelum ada peringkat
- Srs For Online Movie Ticket BookingDokumen9 halamanSrs For Online Movie Ticket BookingKaran Kadakia71% (7)
- Moto E7 Power Service Manual V1.0Dokumen97 halamanMoto E7 Power Service Manual V1.0Felipe de san anicetoBelum ada peringkat
- RLIT 6310.90L Children's and Adolescent Literature: Textbook And/or Resource MaterialDokumen10 halamanRLIT 6310.90L Children's and Adolescent Literature: Textbook And/or Resource MaterialTorres Ken Robin DeldaBelum ada peringkat
- Identifying Your Oracle Database Release NumberDokumen2 halamanIdentifying Your Oracle Database Release Numberకృష్ణమోహన్ రెడ్డి గోపిరెడ్డిBelum ada peringkat
- Subhadip CVDokumen3 halamanSubhadip CVToufik HossainBelum ada peringkat
- How To Encipher and Decipher Codes Using The Hill 2-CipherDokumen17 halamanHow To Encipher and Decipher Codes Using The Hill 2-CipherHaftamuBelum ada peringkat
- How ICT Has Impacted Key Areas Like Education, Employment and MoreDokumen42 halamanHow ICT Has Impacted Key Areas Like Education, Employment and MoreZꪖʀᥴʜTɀꪗ.Belum ada peringkat
- Airport Management SystemDokumen4 halamanAirport Management SystemFrish MirBelum ada peringkat
- ZTE UMTS Cell Selection and ReselectionDokumen83 halamanZTE UMTS Cell Selection and Reselectionsudhir_gsrc100% (1)
- Hull Me S Her ManualDokumen121 halamanHull Me S Her ManualCông TuấnBelum ada peringkat
- 15A05404 Formal Languages & Automata TheoryDokumen2 halaman15A05404 Formal Languages & Automata TheoryScribd JdjBelum ada peringkat
- Mothership Zine Rulebook v5 PDFDokumen44 halamanMothership Zine Rulebook v5 PDFAna Luiza FernandesBelum ada peringkat
- Deepfacelab: Integrated, Flexible and Extensible Face-Swapping FrameworkDokumen10 halamanDeepfacelab: Integrated, Flexible and Extensible Face-Swapping FrameworksamsBelum ada peringkat
- Getting Started with Limelight VisionDokumen83 halamanGetting Started with Limelight VisionHuma TajBelum ada peringkat