Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Beneficiation of Low Grade Graphite Ore Deposits of Tamilnadu (India)Dokumen10 halamanBeneficiation of Low Grade Graphite Ore Deposits of Tamilnadu (India)sanjibkrjanaBelum ada peringkat
- Project Execution PlanDokumen69 halamanProject Execution PlanGraco Calle100% (6)
- Fasteners StandardsDokumen98 halamanFasteners StandardsRahul Betgeri100% (4)
- About Karmic Debt Numbers in NumerologyDokumen3 halamanAbout Karmic Debt Numbers in NumerologyMarkMadMunki100% (2)
- Yoga Nidra - Text PDFDokumen265 halamanYoga Nidra - Text PDFVinod Kumar100% (1)
- Detailed Lesson Plan - Hand Movements and Gestures in Folk DanceDokumen2 halamanDetailed Lesson Plan - Hand Movements and Gestures in Folk DanceJaime MenceroBelum ada peringkat
- 5S PrincipleDokumen53 halaman5S PrincipleAmir M. VillasBelum ada peringkat
- Are View of Graphite Benef I Ciati On TechniquesDokumen13 halamanAre View of Graphite Benef I Ciati On TechniquessanjibkrjanaBelum ada peringkat
- Costing of Oil and Gas Projects For Efficient Management and SustainabilityDokumen15 halamanCosting of Oil and Gas Projects For Efficient Management and SustainabilityMohammed M. Mohammed67% (3)
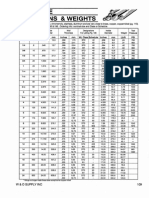
- Pipe's Wall Thickness: ASTM A312, A358, A778, A53, A106, API 5L ASME/ANSI B36.19 B36.10Dokumen0 halamanPipe's Wall Thickness: ASTM A312, A358, A778, A53, A106, API 5L ASME/ANSI B36.19 B36.10Siddiqui Abdul KhaliqBelum ada peringkat
- ASTM D5162 08 Inspeccion Con HolidayDokumen5 halamanASTM D5162 08 Inspeccion Con HolidayJesus A100% (1)
- Beneficiation of Low Grade Graphite Ore of Eastern India by Two-Stage Grinding and Flotation N. Vasumathi, T.V. Vijaya Kumar, B. Nayak, S. Subba Rao, S. Prabhakar, G. Bhaskar RajuDokumen9 halamanBeneficiation of Low Grade Graphite Ore of Eastern India by Two-Stage Grinding and Flotation N. Vasumathi, T.V. Vijaya Kumar, B. Nayak, S. Subba Rao, S. Prabhakar, G. Bhaskar RajusanjibkrjanaBelum ada peringkat
- CalcvesselDokumen11 halamanCalcvesselHami Keserci100% (1)
- Treasure HuntDokumen9 halamanTreasure HuntNutsdieyaa ErnieBelum ada peringkat
- Nyloc Nut Is 7002 PDFDokumen11 halamanNyloc Nut Is 7002 PDFsanjibkrjana0% (1)
- Graphite BookDokumen384 halamanGraphite BooksanjibkrjanaBelum ada peringkat
- Graphite Benefaction - IMMTDokumen45 halamanGraphite Benefaction - IMMTsanjibkrjanaBelum ada peringkat
- The Mooladhara ChakraDokumen13 halamanThe Mooladhara Chakraimamith100% (1)
- Edem TutorialDokumen19 halamanEdem Tutorialsanjibkrjana100% (4)
- Rotary Seal Design GuideDokumen434 halamanRotary Seal Design GuideBhargav Suvagiya100% (3)
- Johnson, David W - Johnson, Frank P - Joining Together - Group Theory and Group Skills (2013)Dokumen643 halamanJohnson, David W - Johnson, Frank P - Joining Together - Group Theory and Group Skills (2013)Farah Ridzky Ananda88% (8)
- Graphite Beneficiation ProcessDokumen7 halamanGraphite Beneficiation ProcesssanjibkrjanaBelum ada peringkat
- Project Area - PDF: Your ProgressDokumen9 halamanProject Area - PDF: Your ProgresssanjibkrjanaBelum ada peringkat
- Minerals 07 00115Dokumen13 halamanMinerals 07 00115sanjibkrjanaBelum ada peringkat
- 7734 Van HorssenDokumen51 halaman7734 Van HorssensanjibkrjanaBelum ada peringkat
- Methods of Extraction of Precious Metals From High Carbon RockDokumen4 halamanMethods of Extraction of Precious Metals From High Carbon RocksanjibkrjanaBelum ada peringkat
- 1 General Products 82511 113Dokumen1 halaman1 General Products 82511 113Fajr Al-FurqonBelum ada peringkat
- Floatability Study of Graphite Ore From Southeast Sulawesi (Indonesia)Dokumen7 halamanFloatability Study of Graphite Ore From Southeast Sulawesi (Indonesia)sanjibkrjanaBelum ada peringkat
- Determination of Optimal Flotation Conditions of Low-Grade Graphite OreDokumen8 halamanDetermination of Optimal Flotation Conditions of Low-Grade Graphite OresanjibkrjanaBelum ada peringkat
- Eng in Data 2010Dokumen24 halamanEng in Data 2010Shaurya RangiBelum ada peringkat
- SL No Product Issue Detail of Items in Issues: Outer TubeDokumen14 halamanSL No Product Issue Detail of Items in Issues: Outer TubesanjibkrjanaBelum ada peringkat
- Coal Mining in IndiaDokumen2 halamanCoal Mining in IndiasanjibkrjanaBelum ada peringkat
- Lovejoy CouplingsDokumen28 halamanLovejoy CouplingsCarlos Alberto Bardales GarciaBelum ada peringkat
- HP PDFDokumen20 halamanHP PDFsanjibkrjanaBelum ada peringkat
- Parker Fluid Power Seal Design Guide 5370Dokumen300 halamanParker Fluid Power Seal Design Guide 5370edwardsheridan0% (1)
- IndustrialApplications PDFDokumen2 halamanIndustrialApplications PDFsanjibkrjanaBelum ada peringkat
- Potash Flotation ProcessDokumen8 halamanPotash Flotation ProcesssanjibkrjanaBelum ada peringkat
- UHMW (Ultra High Molecular Weight Polyethylene) : General Material PropertiesDokumen1 halamanUHMW (Ultra High Molecular Weight Polyethylene) : General Material PropertiessanjibkrjanaBelum ada peringkat
- DonnetDokumen12 halamanDonnetAsia SzmyłaBelum ada peringkat
- MODBUSDokumen19 halamanMODBUSJosé Luis MartínezBelum ada peringkat
- Generalization of The Lavallée and Hidiroglou AlgorithmDokumen11 halamanGeneralization of The Lavallée and Hidiroglou AlgorithmCristian MoisésBelum ada peringkat
- SajaneDokumen6 halamanSajaneJoshua AbordoBelum ada peringkat
- P1 88thminutesDokumen42 halamanP1 88thminutesVaishnavi JayakumarBelum ada peringkat
- IO Chapter6 FinalDokumen10 halamanIO Chapter6 FinalJulia MoplaBelum ada peringkat
- School of Education - Writing A Research Proposal - Durham UniversityDokumen2 halamanSchool of Education - Writing A Research Proposal - Durham UniversityRussasmita Sri PadmiBelum ada peringkat
- Structural Dynamics: 10/11/2017 Dynamic Analysis 1Dokumen110 halamanStructural Dynamics: 10/11/2017 Dynamic Analysis 1Mohammed Essam ShatnawiBelum ada peringkat
- 17. ĐỀ SỐ 17 HSG ANH 9 HUYỆNDokumen9 halaman17. ĐỀ SỐ 17 HSG ANH 9 HUYỆNHồng Hoàn NguyễnBelum ada peringkat
- Practice Revision Questions Number SystemsDokumen1 halamanPractice Revision Questions Number SystemsRavi Prasaath IXBelum ada peringkat
- Low Power VLSI Circuits and Systems Prof. Ajit Pal Department of Computer Science and Engineering Indian Institute of Technology, KharagpurDokumen22 halamanLow Power VLSI Circuits and Systems Prof. Ajit Pal Department of Computer Science and Engineering Indian Institute of Technology, KharagpurDebashish PalBelum ada peringkat
- How To Install Windows Drivers With Software Applications: August 1, 2006Dokumen12 halamanHow To Install Windows Drivers With Software Applications: August 1, 2006Mohamad Lutfi IsmailBelum ada peringkat
- Ba101 Engineering Mathematics 1Dokumen21 halamanBa101 Engineering Mathematics 1nurhaiziinovasiBelum ada peringkat
- TOS Physical ScienceDokumen1 halamanTOS Physical ScienceSuzette De Leon0% (1)
- Business Decision MakingDokumen5 halamanBusiness Decision MakingShafiya CaderBelum ada peringkat
- Expanding UNIT 1 For 2º ESO.-the History of Music NotationDokumen1 halamanExpanding UNIT 1 For 2º ESO.-the History of Music NotationEwerton CândidoBelum ada peringkat
- ParallelDokumen4 halamanParallelShanntha JoshittaBelum ada peringkat
- Oakwood, Ub CityDokumen18 halamanOakwood, Ub CityAfreen BandayBelum ada peringkat
- استخدام الشبكة الإدارية في السلوك القيادي بحث محكمDokumen22 halamanاستخدام الشبكة الإدارية في السلوك القيادي بحث محكمsalm yasmenBelum ada peringkat
- WEEK8 VI MAPARAAN WHLP Q2 - March1 4 2021Dokumen8 halamanWEEK8 VI MAPARAAN WHLP Q2 - March1 4 2021Arjay M. VirayBelum ada peringkat
- Cleanliness LevelDokumen4 halamanCleanliness LevelArunkumar ChandaranBelum ada peringkat
- Edci 67200 Abby Carlin Case Study FacilitationDokumen9 halamanEdci 67200 Abby Carlin Case Study Facilitationapi-265670845Belum ada peringkat