Anda mungkin juga menyukai
- LarLinAlg8 LecturePPTs 04 06Dokumen36 halamanLarLinAlg8 LecturePPTs 04 06Dump AccountBelum ada peringkat
- Chap3 LinearequationsDokumen7 halamanChap3 LinearequationsAd EverythingBelum ada peringkat
- Difference Equations in Normed Spaces: Stability and OscillationsDari EverandDifference Equations in Normed Spaces: Stability and OscillationsBelum ada peringkat
- LAO MatricsDokumen4 halamanLAO Matricshodcommerceeve rkmvcBelum ada peringkat
- A-level Maths Revision: Cheeky Revision ShortcutsDari EverandA-level Maths Revision: Cheeky Revision ShortcutsPenilaian: 3.5 dari 5 bintang3.5/5 (8)
- Least Squares AproximationsDokumen10 halamanLeast Squares AproximationsRaulBelum ada peringkat
- Unique - Solution MatriksDokumen4 halamanUnique - Solution MatriksMasyitah FitridaBelum ada peringkat
- 선형대수 강의노트 kwak, hongDokumen45 halaman선형대수 강의노트 kwak, hongKihong KimBelum ada peringkat
- Matrix Operations: Appendix ADokumen8 halamanMatrix Operations: Appendix ASharmae AydyBelum ada peringkat
- Vector Spaces: All R Is X-Y Plane R Is A LineDokumen6 halamanVector Spaces: All R Is X-Y Plane R Is A LineMahesh AbnaveBelum ada peringkat
- NA 5 LatexDokumen45 halamanNA 5 LatexpanmergeBelum ada peringkat
- Vector and Matrix NormDokumen17 halamanVector and Matrix NormpaivensolidsnakeBelum ada peringkat
- Linear Algebra Chapter 6 - Vector Spaces Associated With MatricesDokumen9 halamanLinear Algebra Chapter 6 - Vector Spaces Associated With Matricesdaniel_bashir808Belum ada peringkat
- O DenotesDokumen69 halamanO DenotesMustafa Hikmet Bilgehan UçarBelum ada peringkat
- System of Linear Equations - NewDokumen6 halamanSystem of Linear Equations - NewsangarfreeBelum ada peringkat
- MAE 200A - Homework Set #1Dokumen2 halamanMAE 200A - Homework Set #1vsauerBelum ada peringkat
- Linear Algebra by Prof. R. Vittal RaoDokumen5 halamanLinear Algebra by Prof. R. Vittal RaoDevraj MandalBelum ada peringkat
- Systems and MatricesDokumen15 halamanSystems and MatricesTom DavisBelum ada peringkat
- MATH2101 Cheat SheetDokumen3 halamanMATH2101 Cheat SheetWong NgBelum ada peringkat
- Algebraic Combinatorics - Po-Shen-Loh - MOP 2011Dokumen5 halamanAlgebraic Combinatorics - Po-Shen-Loh - MOP 2011David DavidBelum ada peringkat
- Gauss Elimination MethodDokumen15 halamanGauss Elimination MethodAditya AgrawalBelum ada peringkat
- Spektralna Teorija 1dfDokumen64 halamanSpektralna Teorija 1dfEmir BahtijarevicBelum ada peringkat
- HW 1Dokumen2 halamanHW 1justinBelum ada peringkat
- (Turner) - Applied Scientific Computing - Chap - 04Dokumen64 halaman(Turner) - Applied Scientific Computing - Chap - 04DanielaSofiaRubianoBlancoBelum ada peringkat
- 08 Vector SubspacesDokumen8 halaman08 Vector Subspacesuser31415Belum ada peringkat
- Linear Algebra Nut ShellDokumen6 halamanLinear Algebra Nut ShellSoumen Bose100% (1)
- 1 System of Linear Equations and Their Solutions: An Example For MotivationDokumen5 halaman1 System of Linear Equations and Their Solutions: An Example For MotivationMehul JainBelum ada peringkat
- Math PrimerDokumen13 halamanMath Primertejas.s.mathaiBelum ada peringkat
- m40 s12 Lecture4Dokumen3 halamanm40 s12 Lecture4ammar_harbBelum ada peringkat
- Principal MinorsDokumen4 halamanPrincipal Minorsringsred100% (1)
- Systems of Linear EquationsDokumen10 halamanSystems of Linear EquationsDenise ParksBelum ada peringkat
- 2000 2 PDFDokumen4 halaman2000 2 PDFMuhammad Al KahfiBelum ada peringkat
- Polynomial CurvingDokumen24 halamanPolynomial CurvingLuffy D. BrownsBelum ada peringkat
- 1456310915E Textchap 3mod 1Dokumen6 halaman1456310915E Textchap 3mod 1Soumyajoy DasBelum ada peringkat
- WIN (2019-20) MAT1002 ETH AP2019205000028 Reference Material I Application of ODE PDFDokumen177 halamanWIN (2019-20) MAT1002 ETH AP2019205000028 Reference Material I Application of ODE PDFEswar RcfBelum ada peringkat
- Imc2000 2Dokumen4 halamanImc2000 2Arief CahyadiBelum ada peringkat
- InterpolationDokumen79 halamanInterpolationNatassa Adi PutriBelum ada peringkat
- cs530 12 Notes PDFDokumen188 halamancs530 12 Notes PDFyohanes sinagaBelum ada peringkat
- Rank of MatrixDokumen11 halamanRank of MatrixNurfarina HusseinBelum ada peringkat
- Least Squares Solution and Pseudo-Inverse: Bghiggins/Ucdavis/Ech256/Jan - 2012Dokumen12 halamanLeast Squares Solution and Pseudo-Inverse: Bghiggins/Ucdavis/Ech256/Jan - 2012Anonymous J1scGXwkKDBelum ada peringkat
- Determinants (CTD) : Cramer's Rule (Section 2.3)Dokumen9 halamanDeterminants (CTD) : Cramer's Rule (Section 2.3)asahBelum ada peringkat
- MIT18 06S10 Final AnswersDokumen14 halamanMIT18 06S10 Final AnswersandreaskailinaBelum ada peringkat
- The Rank of A MatrixDokumen25 halamanThe Rank of A MatrixJinky CanitanBelum ada peringkat
- Assignment 11 Answers Math 130 Linear AlgebraDokumen3 halamanAssignment 11 Answers Math 130 Linear AlgebraCody SageBelum ada peringkat
- Linear AlgebraDokumen15 halamanLinear Algebraolivermaibam19Belum ada peringkat
- Final ExamDokumen6 halamanFinal ExamSara GallegoBelum ada peringkat
- Practice For Null SpaceDokumen3 halamanPractice For Null SpaceIsabel VordzorgbeBelum ada peringkat
- Section 3.3. Matrix Rank and The Inverse of A Full Rank MatrixDokumen13 halamanSection 3.3. Matrix Rank and The Inverse of A Full Rank Matrixnourhan yousefBelum ada peringkat
- VS6-Basis and DimensionDokumen17 halamanVS6-Basis and DimensionVan MinhBelum ada peringkat
- Numerical Linear Algebra Biswa Nath Datta PART II Ch7 11Dokumen392 halamanNumerical Linear Algebra Biswa Nath Datta PART II Ch7 11priya0978Belum ada peringkat
- Jordan Normal Form: 8.1 Minimal PolynomialsDokumen17 halamanJordan Normal Form: 8.1 Minimal PolynomialsMin-Chun WuBelum ada peringkat
- Systems of Linear EccuationsDokumen14 halamanSystems of Linear EccuationsRaulBelum ada peringkat
- Lecture 4-Filled Out PDFDokumen6 halamanLecture 4-Filled Out PDFShanay ThakkarBelum ada peringkat
- The Determinant: A Means To Calculate VolumeDokumen6 halamanThe Determinant: A Means To Calculate VolumeEpic WinBelum ada peringkat
- MA265 Review Chapter 4Dokumen9 halamanMA265 Review Chapter 4IdkBelum ada peringkat
- Cover XavierDokumen19 halamanCover XavierFrancisco Javier Puerta CollBelum ada peringkat
- Things To Know PDFDokumen7 halamanThings To Know PDFJohn ChenBelum ada peringkat
- Multivariate Volatility Forecast and Multi Asset Perp PricingDokumen8 halamanMultivariate Volatility Forecast and Multi Asset Perp PricingEric John JutaBelum ada peringkat
- Predicting CT Image From MRI Data Through Feature Matching With Learned Nonlinear Local DescriptorsDokumen11 halamanPredicting CT Image From MRI Data Through Feature Matching With Learned Nonlinear Local DescriptorsABelum ada peringkat
- B Kolman Introductory Linear Algebra With Applications Macmillan 1976 Xvi426 PPDokumen2 halamanB Kolman Introductory Linear Algebra With Applications Macmillan 1976 Xvi426 PPSoung WathannBelum ada peringkat
- SyllabusDokumen94 halamanSyllabusms2sl4Belum ada peringkat
- Theoretical Neuroscience II Exercise 8: Principal Component Analysis (PCA)Dokumen2 halamanTheoretical Neuroscience II Exercise 8: Principal Component Analysis (PCA)shubhBelum ada peringkat
- Basics of R Programming and Data Structures PDFDokumen80 halamanBasics of R Programming and Data Structures PDFAsmatullah KhanBelum ada peringkat
- Culegere PeterDokumen157 halamanCulegere PeterIoana AvramBelum ada peringkat
- Entanglement Lectures - SusskindDokumen4 halamanEntanglement Lectures - SusskindkieranorBelum ada peringkat
- Robust Observer-Based Controller Design For Uncertain Discrete-Time Systems in Finite Frequency DomainDokumen6 halamanRobust Observer-Based Controller Design For Uncertain Discrete-Time Systems in Finite Frequency DomainIsmail ErrachidBelum ada peringkat
- Matrix Method For Analysis of Hydraulic NetworksDokumen9 halamanMatrix Method For Analysis of Hydraulic NetworksJose2806Belum ada peringkat
- NumPy Arrays NotesDokumen27 halamanNumPy Arrays NotesGab Miro100% (1)
- Singular Value DecompositionDokumen4 halamanSingular Value DecompositionSahas ParabBelum ada peringkat
- Linear Programming Using MATLAB: Maximization Problems Group #1Dokumen32 halamanLinear Programming Using MATLAB: Maximization Problems Group #1Mamoona RasheedBelum ada peringkat
- R Workshop Material 18-19, Oct-2023Dokumen67 halamanR Workshop Material 18-19, Oct-2023Reetika ChoudhuryBelum ada peringkat
- Strategic Management Assientment 2013 BMGTDokumen7 halamanStrategic Management Assientment 2013 BMGTmulat belaynehBelum ada peringkat
- Co Sa MPDokumen9 halamanCo Sa MPMeral GürbüzBelum ada peringkat
- KC Border - More Than You Wanted To Know About Quadratic Forms, CaltechDokumen17 halamanKC Border - More Than You Wanted To Know About Quadratic Forms, CaltechDarabaGabriellBelum ada peringkat
- MAT223 Midterm Exam II Review SheetDokumen4 halamanMAT223 Midterm Exam II Review Sheet张子昂Belum ada peringkat
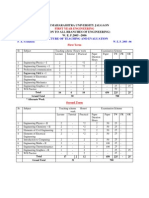
- North Maharashtra University Jalgaon (Common To All Branches of Engineering) W. E. F.2005 - 2006Dokumen19 halamanNorth Maharashtra University Jalgaon (Common To All Branches of Engineering) W. E. F.2005 - 2006satish173Belum ada peringkat
- Signal Processing Blockset - For Use With SimulinkDokumen129 halamanSignal Processing Blockset - For Use With SimulinkengshimaaBelum ada peringkat
- Andriy Burkov - The Hundred-Page Machine Learning Book-Andriy Burkov (2019)Dokumen161 halamanAndriy Burkov - The Hundred-Page Machine Learning Book-Andriy Burkov (2019)Anahi CorralesBelum ada peringkat
- 4.4 System of Linear Equations With Three VariablesDokumen17 halaman4.4 System of Linear Equations With Three Variablesjokydin92Belum ada peringkat
- Lab 5Dokumen5 halamanLab 5Naski Kuafni0% (1)
- Week 6 Schema Fragmentation PDFDokumen43 halamanWeek 6 Schema Fragmentation PDFMarco Julio Del Moral ArgumedoBelum ada peringkat
- MScPhysicsP PDFDokumen8 halamanMScPhysicsP PDFHarshitaBelum ada peringkat
- MAT258TextPages1 28Dokumen32 halamanMAT258TextPages1 28cocowawa8Belum ada peringkat
- B.pharmacy Part-I (Sem I & II)Dokumen37 halamanB.pharmacy Part-I (Sem I & II)gocrazy with yashBelum ada peringkat
- Presentation 40x16 LED SCROLLDokumen15 halamanPresentation 40x16 LED SCROLLChiran AdhikariBelum ada peringkat
- Seismic Performance Evaluation of Facilities Methodology and ImplementationDokumen9 halamanSeismic Performance Evaluation of Facilities Methodology and ImplementationMichael Murfinator MurphyBelum ada peringkat
- Summary of MATLAB OnrampDokumen5 halamanSummary of MATLAB Onrampa.mleki6016Belum ada peringkat
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Dari EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Belum ada peringkat
- Basic Math & Pre-Algebra For DummiesDari EverandBasic Math & Pre-Algebra For DummiesPenilaian: 3.5 dari 5 bintang3.5/5 (6)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsDari EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Dari EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Penilaian: 5 dari 5 bintang5/5 (1)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeDari EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticePenilaian: 4 dari 5 bintang4/5 (2)
- Math Workshop, Grade K: A Framework for Guided Math and Independent PracticeDari EverandMath Workshop, Grade K: A Framework for Guided Math and Independent PracticePenilaian: 5 dari 5 bintang5/5 (1)
- Limitless Mind: Learn, Lead, and Live Without BarriersDari EverandLimitless Mind: Learn, Lead, and Live Without BarriersPenilaian: 4 dari 5 bintang4/5 (6)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormDari EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormPenilaian: 5 dari 5 bintang5/5 (5)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryDari EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryBelum ada peringkat
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingDari EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingPenilaian: 4.5 dari 5 bintang4.5/5 (21)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldDari EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldPenilaian: 3 dari 5 bintang3/5 (80)
- ParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)Dari EverandParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)Belum ada peringkat