Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Harmonically Excited VibrationDokumen61 halamanHarmonically Excited VibrationSiddharth MohanBelum ada peringkat
- Example Problems For Compression MembersDokumen8 halamanExample Problems For Compression MembersBona HirkoBelum ada peringkat
- Schneider BreakerDokumen170 halamanSchneider BreakerJon Lopez50% (2)
- Booklet - Basics of Oil Analysis PDFDokumen20 halamanBooklet - Basics of Oil Analysis PDFluluBelum ada peringkat
- Porosity Specific Surface Area Practice GuideDokumen91 halamanPorosity Specific Surface Area Practice Guidesilentpolter100% (2)
- Battle Axe Pattern Revised Jan 2018Dokumen4 halamanBattle Axe Pattern Revised Jan 2018Joelle GrondinBelum ada peringkat
- Activated Carbon From BambooDokumen19 halamanActivated Carbon From BambooErik WeeksBelum ada peringkat
- Machine maintenance manual H 185 SDokumen441 halamanMachine maintenance manual H 185 SRavinder Singh100% (1)
- 750V DC Traction SystemDokumen26 halaman750V DC Traction SystemShashi Bhusan Singh100% (2)
- Cad CamDokumen13 halamanCad CamMohan RyanBelum ada peringkat
- Chapter 4Dokumen1 halamanChapter 4Mohan RyanBelum ada peringkat
- DiscussionDokumen1 halamanDiscussionMohan RyanBelum ada peringkat
- Process PreparationDokumen2 halamanProcess PreparationMohan RyanBelum ada peringkat
- Apparatus & ProcedureDokumen3 halamanApparatus & ProcedureMohan RyanBelum ada peringkat
- DraftDokumen2 halamanDraftMohan RyanBelum ada peringkat
- Objective of ExperimentDokumen2 halamanObjective of ExperimentMohan RyanBelum ada peringkat
- Efficient Pelton water turbineDokumen2 halamanEfficient Pelton water turbineMohan RyanBelum ada peringkat
- Design Concept and Material 2Dokumen3 halamanDesign Concept and Material 2Mohan RyanBelum ada peringkat
- ShortDokumen11 halamanShortMohan RyanBelum ada peringkat
- Formal Report Lab 1Dokumen11 halamanFormal Report Lab 1Mohan RyanBelum ada peringkat
- Spear Regulator Performance Test ResultsDokumen5 halamanSpear Regulator Performance Test ResultsMohan RyanBelum ada peringkat
- Calculation and Material SelectionDokumen6 halamanCalculation and Material SelectionMohan RyanBelum ada peringkat
- Example and Solution Closed Loop System 1Dokumen1 halamanExample and Solution Closed Loop System 1Mohan RyanBelum ada peringkat
- Vibration Analysis On Grinding Machine: Lecturer: Professor Yeo Kiam Beng at Abdul NoorDokumen9 halamanVibration Analysis On Grinding Machine: Lecturer: Professor Yeo Kiam Beng at Abdul NoorMohan RyanBelum ada peringkat
- Introduction Exp1.2Dokumen1 halamanIntroduction Exp1.2Mohan RyanBelum ada peringkat
- March 2011 CalendarDokumen1 halamanMarch 2011 CalendarFromMeToYouBelum ada peringkat
- Stand Up TableDokumen1 halamanStand Up TableMohan RyanBelum ada peringkat
- Gaya Penulisan Ums 2014 English VersionDokumen48 halamanGaya Penulisan Ums 2014 English VersionMohan Ryan100% (1)
- Schedule KM31401 2013Dokumen1 halamanSchedule KM31401 2013Mohan RyanBelum ada peringkat
- Fire Alarm CircuitDokumen3 halamanFire Alarm CircuitMohan RyanBelum ada peringkat
- June 2014 Malaysian Calendar EventsDokumen1 halamanJune 2014 Malaysian Calendar EventsMohan RyanBelum ada peringkat
- BK12160475 Cad AssignmentDokumen8 halamanBK12160475 Cad AssignmentMohan RyanBelum ada peringkat
- Math 4 Assignment, Intro & TheoryDokumen3 halamanMath 4 Assignment, Intro & TheoryMohan RyanBelum ada peringkat
- Ladders and Bridges: ObjectiveDokumen4 halamanLadders and Bridges: ObjectiveMohan RyanBelum ada peringkat
- March 2011 CalendarDokumen1 halamanMarch 2011 CalendarFromMeToYouBelum ada peringkat
- Presentation 1Dokumen1 halamanPresentation 1Mohan RyanBelum ada peringkat
- ProcedureDokumen3 halamanProcedureMohan RyanBelum ada peringkat
- Biostone C20 Safety Data SheetDokumen10 halamanBiostone C20 Safety Data Sheetchoton_iiiBelum ada peringkat
- Neptune Orthopaedics Standard Operating Procedure-ProductionDokumen3 halamanNeptune Orthopaedics Standard Operating Procedure-Productiondhir.ankurBelum ada peringkat
- 350 MW Power Plant Technical SpecificationsDokumen7 halaman350 MW Power Plant Technical SpecificationsEricGaringanaoBelum ada peringkat
- Efficient Selection of Agitators: Sulzer PumpsDokumen2 halamanEfficient Selection of Agitators: Sulzer PumpsjokishBelum ada peringkat
- CSA-Li 2018Dokumen9 halamanCSA-Li 2018Subramanian MoorthyBelum ada peringkat
- Unit 123 Derivation & Problems PartsDokumen158 halamanUnit 123 Derivation & Problems Partseugin cebertBelum ada peringkat
- Insulating Systems For High-Voltage Rotating MachinesDokumen16 halamanInsulating Systems For High-Voltage Rotating MachinesNikulin JoelBelum ada peringkat
- Diagnostic Exam for Aeronautical Engineering StudentsDokumen4 halamanDiagnostic Exam for Aeronautical Engineering StudentsBerns DulamBelum ada peringkat
- Bend Stretch Forming AluminumDokumen8 halamanBend Stretch Forming AluminumMomoBelum ada peringkat
- Copper Alloy Guide EngDokumen3 halamanCopper Alloy Guide EngRishi SharmaBelum ada peringkat
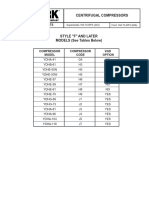
- Renewal Parts - YK Mod F and Later HA-HB-HE-HG - G, H & J Series CompressorsDokumen112 halamanRenewal Parts - YK Mod F and Later HA-HB-HE-HG - G, H & J Series CompressorsKannan KrishnamoorthyBelum ada peringkat
- Eye C GasDokumen3 halamanEye C GasLuis ReyesBelum ada peringkat
- Almasol 1250-1251 Product Info PDFDokumen2 halamanAlmasol 1250-1251 Product Info PDFmehmetaliozgurBelum ada peringkat
- Coils 10 SeriesDokumen4 halamanCoils 10 SeriesMr CrossplaneBelum ada peringkat
- Leatherman Wave ManualDokumen2 halamanLeatherman Wave ManualGuilherme ChiminelliBelum ada peringkat
- Manifolds and Connectors For Fluidic ApplicationsDokumen16 halamanManifolds and Connectors For Fluidic ApplicationsNéstor Valles VillarrealBelum ada peringkat
- Chapter 41Dokumen9 halamanChapter 41Shridhar KulkarniBelum ada peringkat
- Guide to Understanding Operations ProcessesDokumen75 halamanGuide to Understanding Operations ProcessesrajeeevaBelum ada peringkat
- MIGUA - Migutrans - Catalogue CDokumen60 halamanMIGUA - Migutrans - Catalogue CjajayttBelum ada peringkat
- Sub Title IodoformDokumen3 halamanSub Title IodoformReni whynBelum ada peringkat
- Spitzer Dry Bulk Tankers GuideDokumen31 halamanSpitzer Dry Bulk Tankers GuidealiBelum ada peringkat
- Formula One - Technical Regulations - 2017Dokumen91 halamanFormula One - Technical Regulations - 2017antoniocdof1Belum ada peringkat