Anda mungkin juga menyukai
- LCD 16x2Dokumen6 halamanLCD 16x2teguh iman100% (2)
- Unsigned Short Char Char: "1" "Key:" "Times:"Dokumen2 halamanUnsigned Short Char Char: "1" "Key:" "Times:"Youcef Benaniba100% (1)
- Praktek 6 AVR Display Data Pada LCD-1Dokumen15 halamanPraktek 6 AVR Display Data Pada LCD-1YeheskielRantePayung100% (1)
- Design Assignment #7 LCD Temperature DisplayDokumen4 halamanDesign Assignment #7 LCD Temperature Displayliquidmoon1973100% (2)
- LCD4Bit ModDokumen5 halamanLCD4Bit ModCleison Armando Manrique Aguirre100% (1)
- Programa SPI MestreDokumen5 halamanPrograma SPI MestreAlan Robson100% (1)
- Interfacing A LCD Display With 8051Dokumen7 halamanInterfacing A LCD Display With 8051bhaswati100% (1)
- The Ultrasonic SensorDokumen14 halamanThe Ultrasonic SensorAdalberto Sharpley100% (1)
- LCD & ADC Experiment CodeDokumen5 halamanLCD & ADC Experiment CodeKavindran Ganesan100% (1)
- PWM LedsDokumen6 halamanPWM LedsJavier Arredondo Muñoz Ledo100% (1)
- 4 Pin LCDDokumen13 halaman4 Pin LCDVenkata Konda Reddy Mulle100% (1)
- Unit - Iii MPMC-1Dokumen79 halamanUnit - Iii MPMC-1gunda manasa100% (1)
- LCD 8051 Ver1Dokumen6 halamanLCD 8051 Ver1Nur Razanah Mohd Yasin100% (1)
- Octal Configurable Low/High Side Driver: DescriptionDokumen18 halamanOctal Configurable Low/High Side Driver: DescriptionDan Esenther100% (1)
- 1-Basics of MicroprocessorDokumen9 halaman1-Basics of Microprocessorafzal_a100% (1)
- 4 Bit LCDDokumen4 halaman4 Bit LCDSuresh Kuruma100% (1)
- PIC Programming Module USB and Traffic Light System ControllerDokumen26 halamanPIC Programming Module USB and Traffic Light System ControllerJosh, LRT100% (1)
- Circuit DiagramDokumen10 halamanCircuit DiagramM Rameez Ur Rehman100% (1)
- Pulsadores xc8 18f452Dokumen3 halamanPulsadores xc8 18f452Juan Sandoval100% (1)
- Practical PIC ProjectsDokumen14 halamanPractical PIC ProjectsArdhika Dhennis Putra Ananda100% (1)
- LPC P2148Dokumen19 halamanLPC P2148Sharath Babu100% (1)
- LCD Interfacing PDFDokumen37 halamanLCD Interfacing PDFPeeyush Kp100% (1)
- 10.1 I2C Basics - EngscopeDokumen8 halaman10.1 I2C Basics - Engscopeshadow_smdk100% (1)
- Reset VCC H1 H2 H3 H4 H5 H6 H7 H8Dokumen1 halamanReset VCC H1 H2 H3 H4 H5 H6 H7 H8Vt Tung100% (1)
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSDokumen15 halamanSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSSergio Juan100% (1)
- Newbie's Guide To AVR TimersDokumen23 halamanNewbie's Guide To AVR TimersNitish Kumar100% (1)
- LCD HandshakingDokumen19 halamanLCD HandshakingNvskinId100% (1)
- Difference Between PIC and AVRDokumen8 halamanDifference Between PIC and AVRVinsen Teubun Letsoin100% (1)
- Pic18 Interrupt 2Dokumen19 halamanPic18 Interrupt 2adamwaiz100% (3)
- PIC32MX795F512L Microcontroller Development BoardDokumen1 halamanPIC32MX795F512L Microcontroller Development BoardDaniel Cafu100% (2)
- 1.3inch OLED UserManualDokumen7 halaman1.3inch OLED UserManualReV100% (1)
- PIC18LF4550 STK1 Rev3aDokumen1 halamanPIC18LF4550 STK1 Rev3aEmilio Escalante100% (1)
- Choosing The Correct DigipotDokumen4 halamanChoosing The Correct Digipottubeman1814100% (1)
- Lab2 MotorControl 08Dokumen18 halamanLab2 MotorControl 08ĐạiDương100% (1)
- LCD Functions For Displays With Up To 2x40 CharactersDokumen3 halamanLCD Functions For Displays With Up To 2x40 Charactersdjdoover100% (2)
- By Marl Us: Lighting The Right To TheDokumen7 halamanBy Marl Us: Lighting The Right To TheGiancarloRichardRivadeneyraMiranda100% (1)
- Parity Bit Generator Using 3 Input XOR GDokumen6 halamanParity Bit Generator Using 3 Input XOR Gvirat sharma100% (1)
- LCD 4 Bit Test MCB 2300Dokumen7 halamanLCD 4 Bit Test MCB 2300gollapudi vamsikrishna100% (2)
- External Interrupt in Atmega 16Dokumen19 halamanExternal Interrupt in Atmega 16kelvinmanoj100% (1)
- Topic 12 - ATMega32 Timer in C (ISMAIL - FKEUTM 2017)Dokumen55 halamanTopic 12 - ATMega32 Timer in C (ISMAIL - FKEUTM 2017)Aya Amir100% (1)
- CAN Pirate SchematicsDokumen1 halamanCAN Pirate SchematicsDon Johnson100% (1)
- Unit 1 Architecture of Pic 16cXXDokumen41 halamanUnit 1 Architecture of Pic 16cXXKapilachander Thangavel100% (1)
- 16f887 DoublemeternosimDokumen1 halaman16f887 DoublemeternosimSan Lug Oma100% (1)
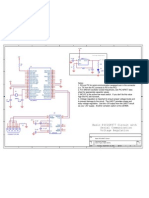
- Circuit diagram analysis and simulationDokumen1 halamanCircuit diagram analysis and simulationyu7bx2178100% (1)
- Open Source Frequency Counter DIY Kit 10Hz-250MHzDokumen10 halamanOpen Source Frequency Counter DIY Kit 10Hz-250MHzBruno Santos de Miranda100% (1)
- Basic 16f877Dokumen1 halamanBasic 16f877api-27535945100% (1)
- Pic-Web Development Board Users Manual: Rev.A, July 2008Dokumen14 halamanPic-Web Development Board Users Manual: Rev.A, July 2008darazzi100% (1)
- USART UART RS232 USB SPI I2C TTL Etc What Are All of These and How Do They Relate To Each OtherDokumen4 halamanUSART UART RS232 USB SPI I2C TTL Etc What Are All of These and How Do They Relate To Each OtherMohamed Ashraf100% (1)
- KeypadDokumen1 halamanKeypadPhap Nguyen100% (1)
- PHOENIX - RS232 - 485 To TCPDokumen14 halamanPHOENIX - RS232 - 485 To TCPJorge_Andril_5370100% (1)
- Micro Smart ManualDokumen455 halamanMicro Smart ManualJuan Carlos100% (1)
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSDokumen15 halamanSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSMardan Sabily Hasibuan100% (2)
- SPI I2C Bus Lines Control Multiple PeripheralsDokumen10 halamanSPI I2C Bus Lines Control Multiple PeripheralsCarlos Roman Zarza100% (2)
- LCD EEPROM Microcontroller Example Using PIC16F877ADokumen1 halamanLCD EEPROM Microcontroller Example Using PIC16F877AGiovanni Coaquira100% (1)
- List IC CampurDokumen17 halamanList IC CampurFudin Safudin100% (2)
- Usart Atmega328Dokumen3 halamanUsart Atmega328Hitesh Sahu100% (1)
- Digital Temperature Meter Using PIC16F688Dokumen3 halamanDigital Temperature Meter Using PIC16F688Bhuvaneswaran VutwobwnBelum ada peringkat
- Lab 14Dokumen10 halamanLab 14ubaidBelum ada peringkat
- Laboratory Report (For Online Lab Class Only) : ECTE333: Microcontroller Architecture and Application Spring 2020 SessionDokumen8 halamanLaboratory Report (For Online Lab Class Only) : ECTE333: Microcontroller Architecture and Application Spring 2020 SessionSaad KamranBelum ada peringkat
- Data Percobaan 1. Mengakses LED Dengan SWITCH A. ProgramDokumen9 halamanData Percobaan 1. Mengakses LED Dengan SWITCH A. ProgramSutat MANALOMBelum ada peringkat
- Pic 16 FDokumen63 halamanPic 16 FKit Vi Điều Khiển100% (1)
- GaDokumen6 halamanGaKit Vi Điều KhiểnBelum ada peringkat
- I2C AccelDokumen8 halamanI2C AccelKit Vi Điều Khiển100% (1)
- Multimeter Kit v1Dokumen10 halamanMultimeter Kit v1Kit Vi Điều KhiểnBelum ada peringkat
- Eel Rpy Board 1406 WebDokumen1 halamanEel Rpy Board 1406 WebKit Vi Điều KhiểnBelum ada peringkat
- Pic 16 FDokumen63 halamanPic 16 FKit Vi Điều Khiển100% (1)
- Schemat - STM32F103VCT6 - BoardDokumen9 halamanSchemat - STM32F103VCT6 - BoardAnugrah Raden100% (1)
- Ethernet Module ENC28J60 Arduino PDFDokumen5 halamanEthernet Module ENC28J60 Arduino PDFArdian Ramadita SugaraBelum ada peringkat
- Hy32d SCHDokumen1 halamanHy32d SCHKit Vi Điều KhiểnBelum ada peringkat
- Sg8v1 PCB AdapterDokumen1 halamanSg8v1 PCB AdapterKit Vi Điều Khiển100% (1)
- Schematic LED Dong Ho 24HDokumen1 halamanSchematic LED Dong Ho 24HKit Vi Điều KhiểnBelum ada peringkat
- 3.3V-5V REG: ManualDokumen4 halaman3.3V-5V REG: ManualKit Vi Điều KhiểnBelum ada peringkat
- Sg8V1 Programing Schematic: IC Design Research & Education CenterDokumen1 halamanSg8V1 Programing Schematic: IC Design Research & Education CenterKit Vi Điều Khiển100% (1)
- Ccs Asm PDFDokumen332 halamanCcs Asm PDFKit Vi Điều KhiểnBelum ada peringkat
- PDS OperatorStationDokumen7 halamanPDS OperatorStationMisael Castillo CamachoBelum ada peringkat
- Self Report QuestionnaireDokumen6 halamanSelf Report QuestionnaireMustafa AL ShlashBelum ada peringkat
- 8086 Instruction SetDokumen66 halaman8086 Instruction SetRaj KumarBelum ada peringkat
- Challenges of Merchandising in Pridebay Holdings: A Garments Buying HouseDokumen35 halamanChallenges of Merchandising in Pridebay Holdings: A Garments Buying HouseAli AhmadBelum ada peringkat
- WR424GB00DDokumen16 halamanWR424GB00DIgor San Martín PeñalozaBelum ada peringkat
- The Order of Historical Time: The Longue Durée and Micro-HistoryDokumen17 halamanThe Order of Historical Time: The Longue Durée and Micro-HistoryGeorgia KoutaBelum ada peringkat
- 01-Jul-21 03:32 PMDokumen6 halaman01-Jul-21 03:32 PMramBelum ada peringkat
- Smart Dustbin using ArduinoDokumen22 halamanSmart Dustbin using ArduinoEr Dinesh TambeBelum ada peringkat
- Meeting 5: Data Warehouses and SQL Query OptimizationDokumen4 halamanMeeting 5: Data Warehouses and SQL Query Optimizationzvipev1050% (2)
- Hydrogen and Its Compound.1Dokumen10 halamanHydrogen and Its Compound.1abhishekBelum ada peringkat
- Timers, Serial CommunicationDokumen19 halamanTimers, Serial CommunicationVyshnav PBelum ada peringkat
- Disclosure To Promote The Right To InformationDokumen22 halamanDisclosure To Promote The Right To InformationJGD123Belum ada peringkat
- Fans Reference GuideDokumen160 halamanFans Reference Guidekarthikraja21100% (13)
- THKDokumen1.901 halamanTHKapi-26356646Belum ada peringkat
- Blowfish Encryption AlgorithmDokumen3 halamanBlowfish Encryption AlgorithmParkerAllisonBelum ada peringkat
- e-GP System User Manual - Tender Evaluation Committee UserDokumen82 halamane-GP System User Manual - Tender Evaluation Committee UserMd. Jakaria ApuBelum ada peringkat
- FMDS0129Dokumen49 halamanFMDS0129hhBelum ada peringkat
- San Unit-Wise QuestionsDokumen6 halamanSan Unit-Wise QuestionsSushmitha KodupakaBelum ada peringkat
- 2N3866 Datasheet Rev BDokumen5 halaman2N3866 Datasheet Rev Bardier34Belum ada peringkat
- P2 Chp5 RadiansDokumen28 halamanP2 Chp5 RadiansWaqas KhanBelum ada peringkat
- Silo Cement CalculationDokumen11 halamanSilo Cement CalculationFikriaraz AfifBelum ada peringkat
- Lsantos - Reflecting Writing For Optimization ProjectDokumen2 halamanLsantos - Reflecting Writing For Optimization Projectapi-341418797Belum ada peringkat
- Bab 8Dokumen29 halamanBab 8Nurul AmirahBelum ada peringkat
- ID Pengaruh Persistensi Laba Alokasi Pajak Antar Periode Ukuran Perusahaan PertumbuDokumen21 halamanID Pengaruh Persistensi Laba Alokasi Pajak Antar Periode Ukuran Perusahaan PertumbuGheaMarisyaPuteriBelum ada peringkat
- CobolDokumen224 halamanCobolrahulravi007Belum ada peringkat
- Geotehnical Engg. - AEE - CRPQsDokumen48 halamanGeotehnical Engg. - AEE - CRPQsSureshKonamBelum ada peringkat
- Iso 10042Dokumen5 halamanIso 10042Nur Diana100% (3)
- DC Machines Chapter SummaryDokumen14 halamanDC Machines Chapter SummaryMajad RazakBelum ada peringkat
- Employee performance factors analysis electronic companyDokumen10 halamanEmployee performance factors analysis electronic companyAmrithaBelum ada peringkat
- Manual de Operacion de Bomba BlackmerDokumen20 halamanManual de Operacion de Bomba BlackmerMorales EduardoBelum ada peringkat